1.本发明涉及智能清洁领域,具体涉及一种洗地机器人自主换水系统及方法。
背景技术:
2.随着清洁机器人在家用的普及,用户对清洁机器人的使用要求逐渐增加,现有的清洁机器人均为在完成清洁任务后人工完成换水的工作任务,无法完成机器人自主全自主工作。增加了人工成本,且令本就能自主清洁的机器人在换水任务时显得并不智能,无法满足当前用户的全自动智能化需求。
3.本发明解决了清洁机器人无法自主换水的问题,且提高了清洁机器人的工作效率,实现了清洁机器人从半自主化智能化向完全的自主智能化的转变,节约了人工成本。
技术实现要素:
4.本发明为实现上述目的所采用的技术方案是:一种洗地机器人自主换水系统,包括用于为机器人换水的换水站系统,还包括通过洗地机器人控制系统控制的换水系统;所述换水系统与换水站系统通过排水摆杆微动开关触发实现自主换水;
5.所述换水系统包括,本体机壳、储水箱、机器人控制器rc、交换机、i/o模块、注水红外发射传感器、排水阀、进水阀、排水槽、进水口以及排水摆杆微动开关;
6.其中,所述机器人控制器rc、交换机以及i/o模块顺次连接,且均设于洗地机器人控制系统内,所述储水箱设于本体机壳内,所述本体机壳上设有进水口与排水槽,所述进水口与排水槽分别用于与换水站系统对接;
7.所述储水箱设有进水孔和排水孔,所述排水孔通过排水管路与排水槽连接,所述进水孔通过进水管路与进水口连接,所述排水管路和进水管路上分别设有排水阀和进水阀;
8.所述排水槽旁设有排水摆杆微动开关,所述排水摆杆微动开关与i/o模块连接,用于被排水模块触发并发送与供水站系统接通的输入信号经i/o模块和交换机至机器人控制器rc;
9.所述注水红外发射传感器设于换水系统本体机壳上,且与i/o模块连接。
10.所述供水站系统包括:注水红外接收传感器、注水模块和排水模块;所述注水红外接收传感器与注水模块连接;
11.所述排水模块包括出水管以及安装在出水管的电动阀,所述排水模块与换水系统的排水口对接时,触发排水摆动微动开关;
12.所述注水模块包括出水阀以及出水阀继电器,当注水模块与机器人的换水系统的进水口对接;注水红外接收传感器接收机器人换水系统的注水红外发射传感器发射的红外射线时,出水阀继电器线圈得电,使出水阀继电器的常开触点闭合,出水阀开启。
13.所述储水箱上设有测量储水箱内水位的液位计,所述液位计与i/o模块连接。
14.所述液位计上设有第一接近开关与第二接近开关,所述第一接近开关用于当储水
箱内水位为零时,第一接近开关闭合;所述第二接近开关用于当储水箱内水位超过设定值时,第二接近开关闭合。
15.所述排水阀和进水阀分别连有排水阀继电器和进水阀继电器。
16.一种洗地机器人,其特征在于,所述洗地机器人包括有如权利要求1~5任一项所述换水系统。
17.一种洗地机器人自主换水系统的自主换水方法,包括以下步骤:
18.(1)当机器人到达换水站系统时,排水模块按压换水系统的排水摆杆微动开关,机器人开始进行排水工作;液位计实时反馈储水箱内的水位信息至机器人控制器rc,监测排水工作是否完成;
19.(2)排水工作完成后,机器人执行注水工作,注水工作完成后,机器人离开换水站系统,自主换水任务完成。
20.所述机器人开始进行排水工作,具体为:
21.所述排水摆杆微动开关触发并发送与供水站系统接通的输入信号至i/o模块,i/o模块反馈给机器人控制器rc,机器人控制器rc对i/o模块下发指令,控制i/o模块输出电压分别为排水阀继电器和进水阀继电器供电,排水阀继电器和进水阀继电器得电后线圈吸合,排水阀和进水阀得电阀门打开,排水阀开始排水,进水阀输送空气,机器人开始进行排水工作。
22.所述液位计实时反馈储水箱内的水位信息至机器人控制器rc,监测排水工作是否完成,具体为:
23.当储水箱水位降至液位计为零水位时,液位计第一接近开关闭合导通后,通过i/o模块反馈给机器人控制器rc水位信号,机器人控制器rc对i/o模块下发指令,第二接近开关开启,排水阀继电器失电线圈断开,排水阀关闭,机器人排水工作结束。
24.所述排水工作完成后,机器人执行注水工作,包括以下步骤:
25.1)机器人控制器rc对i/o模块下发指令,控制i/o模块输出电压为注水红外发射传感器供电,注水红外发射传感器得电后向换水站的注水红外接收传感器发射红外光波射线,换水站系统根据注水红外接收传感器接收到红外光波射线,控制出水阀继电器得电使常开触点吸合导通,出水阀打开向换水系统注水,此时机器人执行注水工作;
26.2)当水箱水位升至液位计超过设定值时,第二接近开关闭合,对i/o模块输出电压,i/o模块反馈给机器人控制器rc,机器人控制器rc对i/o模块下发指令,经i/o模块控制注水红外发射传感器失电,注水红外发射传感器停止向换水站的注水红外接收传感器发射红外光波射线,换水站的注水红外接收传感器接收不到红外光波射线后,出水阀继电器断电,出水阀关闭,停止向储水箱注水;
27.3)机器人控制器rc延时对i/o模块下发指令,经i/o模块控制进水阀继电器失电后断开,进水阀关闭,保证注水管内剩余的水可以完全流进储水箱,机器人注水工作完成。
28.本发明具有以下有益效果及优点:
29.1.本发明可用于无自主换水功能的清洁机器人改造。
30.2.本发明可以弥补清洁机器人无自主换水功能的空缺。
31.3.本发明换水站设计较为简单且方便搭建。
32.4.本发明提高了清洁机器人的工作效率,实现了清洁机器人从半自主化智能化向
完全的自主智能化的转变,节约了人工成本。
附图说明
33.图1为本发明的机器人控制换水系统的结构示意图;
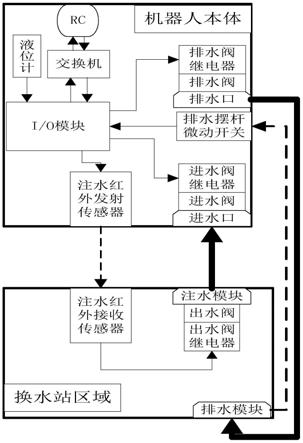
34.图2为本发明的机器人本体内部自动换水功能原理图;
35.其中,1为i/o模块、2为液位计、3为排水摆杆微动开关、4为注水红外发射传感器、5为排水阀继电器、6为进水阀继电器、7为排水阀、8为进水阀、12为第一接近开关,13为第二接近开关;
36.图3为本发明的换水站内部原理图;
37.其中,9为注水红外接收传感器、10为出水阀继电器、11为出水阀;
38.图4为本发明的工作原理图;
39.图5为本发明换水站系统结构示意图一;
40.图6为本发明换水站系统结构示意图二。
具体实施方式
41.下面结合附图及实施例对本发明做进一步的详细说明。
42.如图1所示,为本发明的机器人控制换水系统的结构示意图,机器人控制器rc与i/o模块1通过以太网与无线交换机交互,实现通讯。
43.如图4~6所示,一种洗地机器人自主换水系统,包括用于为机器人换水的换水站系统,还包括通过洗地机器人控制系统控制的换水系统;换水系统与换水站系统通过排水摆杆微动开关3触发实现自主换水;
44.换水系统包括,本体机壳、储水箱、机器人控制器rc、交换机、i/o模块1、注水红外发射传感器4、排水阀7、进水阀8、排水槽、进水口以及排水摆杆微动开关3;
45.其中,机器人控制器rc、交换机以及i/o模块1顺次连接,且均设于洗地机器人控制系统内,储水箱设于本体机壳内,本体机壳上设有进水口与排水槽,进水口与排水槽分别用于与换水站系统对接;
46.储水箱设有进水孔和排水孔,排水孔通过排水管路与排水槽连接,进水孔通过进水管路与进水口连接,排水管路和进水管路上分别设有排水阀7和进水阀8;
47.排水槽旁设有排水摆杆微动开关3,排水摆杆微动开关3与i/o模块1连接,用于被排水模块触发并发送与供水站系统接通的输入信号经i/o模块1和交换机至机器人控制器rc;
48.注水红外发射传感器4设于换水系统本体机壳上,且与i/o模块1连接。
49.供水站系统包括:注水红外接收传感器9、注水模块和排水模块;注水红外接收传感器9与注水模块连接;注水红外接收传感器9与注水模块之间设有处理器,根据注水红外接收传感器9反馈信号控制注水模块或排水模块的开启或关闭;
50.排水模块包括出水管以及安装在出水管上的电动阀,排水模块与换水系统的排水口对接时,触发排水摆动微动开关3;出水管上的电动阀与处理器连接,用于接收红外信号后,使电动阀开启,排水口导通,进而实现换水系统的排水阀7排出的污水。
51.注水模块包括出水阀11以及出水阀继电器10,出水阀继电器10的线圈并联设有防
止继电器被击穿的反向二极管,当注水模块与机器人的换水系统的进水口对接;注水红外接收传感器9接收机器人换水系统的注水红外发射传感器4发射的红外射线时,出水阀继电器10线圈得电,使出水阀继电器10的常开触点闭合,出水阀11开启。
52.储水箱上设有测量储水箱内水位的液位计2,液位计与i/o模块1连接。
53.液位计2上设有第一接近开关12与第二接近开关13,第一接近开关12用于当储水箱内水位为零时,第一接近开关12闭合;第二接近开关13用于当储水箱内水位超过设定值时,第二接近开关13闭合。
54.排水阀7和进水阀8分别连有排水阀继电器和进水阀继电器,排水阀继电器的线圈和进水阀继电器的线圈上均设有反向二极管。
55.一种洗地机器人包括换水系统,换水系统安装在洗地机器人的机器人本体上,机器人控制器rc、交换机以及i/o模块1均设于洗地机器人控制系统内,所述换水系统设于洗地机器人上,洗地机器人为现有技术。
56.如图2所示,为本发明的机器人本体内部自动换水功能原理图,i/o模块1的24v与机器人内部dc24v相接,i/o模块1gnd与机器人内部gnd相接,实现i/o模块1的供电;液位计2的正极与机器人内部dc24v相接,液位计2的第一接近开关12输出接i/o模块1的i0.1,液位计2的第二接近开关13输出接i/o模块1的i0.2;排水摆杆微动开关3的两个触点分别与机器人内部dc24v和i/o模块1的i0.3相接;注水红外发射传感器4的正极与i/o模块1的q0.1相接,注水红外发射传感器4的负极与机器人内部gnd相接;排水阀继电器5的正极与i/o模块1的q0.2相接,排水阀继电器5的负极与机器人内部gnd相接,排水阀继电器5的控制线圈分别与机器人内部dc24v和排水阀7的正极相接,排水阀7的负极与机器人内部gnd相接;进水阀继电器6的正极与i/o模块1的q0.3相接,进水阀继电器6的负极与机器人内部gnd相接,进水阀继电器6的控制线圈分别与机器人内部dc24v和进水阀8的正极相接,进水阀8的负极与机器人内部gnd相接。
57.如图3所示,为换水站内部原理图。注水红外接收传感器9的正极与火线l相接,注水红外接收传感器9的负极与零线n相接,注水红外接收传感器9的输出端与出水阀继电器10的正极相接,出水阀继电器10的负极与零线n相接;出水阀继电器10的控制线圈分别与火线l和出水阀11的正极相接,出水阀11的负极与零线n相接。
58.一种洗地机器人自主换水系统的自主换水方法,包括以下步骤:
59.(1)当机器人到达换水站系统时,排水模块按压换水系统的排水摆杆微动开关3,机器人开始进行排水工作;液位计2实时反馈储水箱内的水位信息至机器人控制器rc,监测排水工作是否完成;
60.(2)排水工作完成后,机器人执行注水工作,注水工作完成后,机器人离开换水站系统,自主换水任务完成。
61.机器人开始进行排水工作,具体为:
62.排水摆杆微动开关3触发并发送与供水站系统接通的输入信号至i/o模块1,i/o模块1反馈给机器人控制器rc,机器人控制器rc对i/o模块1下发指令,控制i/o模块1输出电压分别为排水阀继电器5和进水阀继电器6供电,排水阀继电器5和进水阀继电器6得电后线圈吸合,排水阀7和进水阀8得电,排水阀7开始排水,进水阀8输送空气,机器人开始进行排水工作。
63.液位计2实时反馈储水箱内的水位信息至机器人控制器rc,监测排水工作是否完成,具体为:
64.当储水箱水位降至液位计为零水位时,液位计第一接近开关12闭合导通后,对i/o模块1输出电压,i/o模块1反馈给机器人控制器rc,机器人控制器rc对i/o模块1下发指令,控制i/o模块1与液位计2间的第二接近开关13开启,停止输出,排水阀继电器5失电线圈断开,排水阀7关闭,机器人排水工作结束。
65.排水工作完成后,机器人执行注水工作,包括以下步骤:
66.1)机器人控制器rc对i/o模块1下发指令,控制i/o模块1输出电压为注水红外发射传感器4供电,注水红外发射传感器4得电后向换水站的注水红外接收传感器9发射红外光波射线,换水站系统根据注水红外接收传感器9接收到红外光波射线,控制出水阀继电器10得电使常开触点吸合导通,出水阀11打开向换水系统注水,此时机器人执行注水工作;
67.2)当储水箱水位升至液位计超过设定值时,第二接近开关13闭合,对i/o模块1输出电压,i/o模块1反馈给机器人控制器rc,机器人控制器rc对i/o模块1下发指令,经i/o模块1控制注水红外发射传感器4失电,注水红外发射传感器4停止向换水站的注水红外接收传感器9发射红外光波射线,换水站系统的注水红外接收传感器9接收不到红外光波射线后,出水阀继电器10断电,出水阀11关闭,停止向储水箱注水;
68.3)机器人控制器rc延时对i/o模块1下发指令,经i/o模块1控制进水阀继电器10失电后断开,进水阀11关闭,保证注水管内剩余的水可以完全流进储水箱,机器人注水工作完成。
69.本实施例中具体如图2~3所示,本实施例工作原理如下:当机器人到达换水作业点时,排水模块压下机器人本体排水摆杆微动开关3,触发i0.3输入信号给i/o模块1,i/o模块1反馈给机器人控制器rc,机器人控制器rc对i/o模块1下发指令,控制i/o模块1q0.2和q0.3输出电压分别为排水阀继电器5和进水阀继电器6供电,排水阀继电器5和进水阀继电器6得电后线圈吸合,排水阀7和进水阀8供电回路导通,排水阀7和进水阀8得电阀门打开,排水阀7开始排水,进水阀8输送空气,让排水任务更流畅的进行,此时机器人进入排水工作状态;当水箱水位降至液位计2零水位时,液位计2零水位信号对i/o模块1i0.1输出电压,i/o模块1反馈给机器人控制器rc,机器人控制器rc对i/o模块1下发指令,控制i/o模块1停止q0.2输出,排水阀继电器5失电线圈断开,排水阀7关闭,机器人排水工作结束;同时机器人控制器rc对i/o模块1下发指令,控制i/o模块1q0.1输出电压为注水红外发射传感器4供电,注水红外发射传感器4得电后向换水站的注水红外接收传感器9发射红外光波射线,换水站的注水红外接收传感器9接收到红外光波射线后输出端输出电压给出水阀继电器10,出水阀继电器10得电后线圈吸合,出水阀11供电回路导通,出水阀11打开向机器人本体注水,此时机器人进入注水工作状态;
70.当储水箱水位升至液位计2达到预设值时,液位计2第二接近开关13对i/o模块1i0.2输出电压,i/o模块1反馈给机器人控制器rc,机器人控制器rc对i/o模块1下发指令,控制i/o模块1停止q0.1输出,注水红外发射传感器4失电,注水红外发射传感器4停止向换水站的注水红外接收传感器9发射红外光波射线,换水站的注水红外接收传感器9接收不到红外光波射线后输出端停止输出电压给出水阀继电器10,出水阀继电器10线圈断开,出水阀11供电回路断开,出水阀11闭合停止向机器人本体注水,同时机器人控制器rc延时对i/o
模块1下发指令,延时控制i/o模块1停止q0.3输出,进水阀继电器3延时失电后线圈断开,进水阀8供电回路延时断开,进水阀8延时关闭,储水箱重新回复密封状态,此处做延时控制是为了保证注水管内剩余的水可以完全流进机器人水箱,此时机器人注水工作结束;机器人可以执行作业离开换水站系统,自主换水任务完成。