1.本发明涉及预制箱梁施工设备领域,尤其是涉及一种可移动自插拔箱梁混凝土振捣装置。
背景技术:
2.现有箱梁腹板混凝土振动主要依靠工人手持插入式振捣器进行振捣。该种插入式振捣器由棒状刚性振捣头、连接软管和电机组成。在振捣箱梁腹板时,工人与箱梁顶板处将刚性振捣头抛入腹板底部,振捣头通过自重与振动插入混凝土。按规定时间振捣完成后,工人通过拉扯软管拔出振捣棒。
3.目前该种施工方法主要存在以下问题:1)箱梁腹板处钢筋密布且深度较大,靠工人准确控制插入式振捣器达到腹板底部振捣位置较为困难;2)振捣需要耗费大量人力;3)振捣时间受到工人工作态度影响,进而影响混凝土振捣质量;4)振捣深度难以准确控制。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种可移动自插拔箱梁混凝土振捣装置,解决了手持式插入振捣器存在的上述问题,本发明中所包含的一套机构能使振捣棒在控制系统的控制下实现自插拔,并可在箱梁顶面沿纵桥向移动以实现全桥腹板的振捣。
5.本发明的目的可以通过以下技术方案来实现:
6.本发明的目的是保护一种可移动自插拔箱梁混凝土振捣装置,包括振捣棒纵桥向移动机构、振捣棒伸缩机构、信息采集机构,其中具体地:
7.振捣棒纵桥向移动机构包括沿桥向设置的导轨、横梁、设于横梁下方的第一行走单元,所述横梁通过第一行走单元能够沿导轨进行位移;
8.所述振捣棒伸缩机构包括依次连接横梁的旋转单元伸缩单元和振捣棒,所述旋转单元设于所述横梁上,所述振捣棒能够通过伸缩单元抵达预设振捣深度,所述伸缩单元能够通过旋转单元实现倾角调整;
9.信息采集机构设于所述横梁上,获取顶、腹板钢筋布置情况的图片信息。
10.进一步地,所述伸缩单元为多层钢套管依次活动嵌套连接的钢套筒。
11.进一步地,所述振捣棒设于钢套筒最内层,并可在钢套筒内伸缩。
12.进一步地,所述横梁上开设有平移槽,所述旋转单元设于所述平移槽中,并可沿所述平移槽进行滑动。
13.进一步地,所述旋转单元为旋转杆,所述旋转杆贯穿所述平移槽,且使得旋转杆的两端分别连接一个钢套筒。
14.进一步地,所述旋转单元上匹配有第二行走单元,所述第二行走单元能否带动旋转杆沿所述平移槽进行滑动。
15.进一步地,所述第二行走单元上设有第二伺服电机,所述第二伺服电机的输出端
与所述旋转杆的一端传动连接,以此提供扭转旋转杆的驱动力。
16.进一步地,所述振捣棒与钢套筒之间设有隔振单元,以此抑制振捣棒的振动沿钢套筒方向传递。
17.进一步地,所述信息采集机构包括摄像机。
18.进一步地,所述导轨可设于箱梁模板上。
19.进一步地,横梁可通过滑车在导轨上的移动实现纵桥向的平移。
20.进一步地,所述可移动自插拔箱梁混凝土振捣装置还包括控制机构,所述控制机构分别与振捣棒纵桥向移动机构、振捣棒伸缩机构、信息采集机构电连接。
21.进一步地,控制箱对装置的各个可控制部件的运动进行控制。
22.进一步地,钢套筒可通过伸缩实现一定长度范围内的长度变化,并可在该长度范围内锁定长度的大小。
23.进一步地,摄像机可进行钢筋图像的记录并将信息传输给控制机构。
24.进一步地,控制机构进行钢套筒的倾角控制、腹板振捣棒钢套筒的横桥向位置控制、带振捣棒的钢套筒的下放与提升控制、整个装置沿纵桥向移动的控制以及处理采集到的信息并进行参数的调整。
25.进一步地,控制机构需提前由人输入相关参数,而后整个机构在预设程序下自动运行。
26.与现有技术相比,本发明具有以下技术优势:
27.1)本发明中的振捣装置中,根据腹板钢筋的布置规律,可变角度的旋转装置可为带振捣棒的套筒预设一条直线路径,使得振捣棒能准确到达腹板底部;
28.2)本发明中的振捣装置中,自动控制装置可通过控制多层钢套筒的伸缩控制多层钢套筒的总长度及停止时间使得振捣棒在预设深度中振捣足够的时间,大大减少了所需的人工量。
附图说明
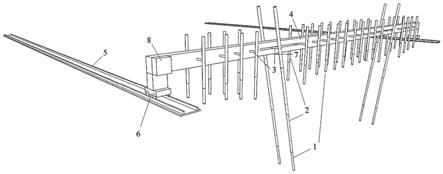
29.图1是本发明中振捣装置的透视图;
30.图2是本发明中振捣装置的正视图;
31.图3是箱梁腹板振捣的透视图;
32.图4是箱梁腹板振捣的正视图;
33.图5是箱梁顶板振捣的透视图;
34.图6是箱梁顶板振捣的正视图;
35.图7是钢套管的结构示意图。
36.图中:1——振捣棒,2——钢套管,3——旋转机构,4——横梁,5——导轨,6——滑车,7——摄像机,8——控制机构,9——箱梁模板,10——钢筋笼,11——橡胶管
具体实施方式
37.下面结合附图和具体实施例对本发明进行详细说明。本技术方案中如未明确说明的部件型号、材料名称、连接结构、算法、控制方法等特征,均视为现有技术中公开的常见技术特征。
38.实施例1
39.本发明由振捣棒伸缩机构、振捣棒纵桥向移动机构、信息采集机构以及控制机构组成。如图1所示,振捣棒伸缩机构包括了振捣棒1、多层结构的套筒2和旋转单元3,具体可参见图1至图6。振捣棒纵桥向移动机构包括了横梁4、导轨5和第一行走单元。信息采集机构包括了摄像机7。
40.具体地,振捣棒纵桥向移动机构包括沿桥向设置的导轨5、横梁4、设于横梁4下方的第一行走单元,所述横梁4通过第一行走单元能够沿导轨5进行位移,第一行走单元具体选为滑车6,滑车6中设有第一伺服电机,实现对滑车6滚轮的驱动,以此实现滑车6在导轨5上的位移控制,导轨5可设于箱梁模板上。
41.具体地,振捣棒伸缩机构所述振捣棒伸缩机构包括依次连接横梁4的旋转单元3、伸缩单元和振捣棒1,所述旋转单元3设于所述横梁4上,所述振捣棒1能够通过伸缩单元抵达预设振捣深度,所述伸缩单元能够通过旋转单元3实现倾角调整。
42.具体地,信息采集机构设于所述横梁4上,获取顶、腹板钢筋布置情况的图片信息。
43.具体地,控制机构分别与振捣棒纵桥向移动机构、振捣棒伸缩机构、信息采集机构电连接。控制机构包括存储器、处理器等,其中处理器可选用目前市场上主流架构的处理器,如arm或x86处理器等。其中处理器与伺服电机、摄像机等可接受指令的设备电连接。
44.伸缩单元为多层钢套管依次活动嵌套连接的钢套筒2。钢套筒2的伸缩控制原理为和起重机吊臂类似的伸缩原理,即绳排伸缩原理,参见图7,利用其中的一个液压杆能够控制多节套筒的共同伸缩,控制机构通过控制液压的输入控制即可实现伸长与收缩的控制。
45.振捣棒1设于钢套筒2最内层,并可在钢套筒2内伸缩。
46.横梁4上开设有平移槽,所述旋转单元3设于所述平移槽中,并可沿所述平移槽进行滑动。旋转单元3为旋转杆,所述旋转杆贯穿所述平移槽,且使得旋转杆的两端分别连接一个钢套筒2。
47.旋转单元3上匹配有第二行走单元,所述第二行走单元能带动旋转杆沿所述平移槽进行滑动。第二行走单元上设有第二伺服电机,所述第二伺服电机的输出端与所述旋转杆的一端传动连接,以此提供扭转旋转杆的驱动力。第二行走单元可选用设于横梁4上的丝杆及第三伺服电机作为驱动组件,丝杆上的滑块作为第二行走单元的主体,滑块与旋转杆上的轴承外圈连接,轴承内圈与旋转杆连接,以此驱动旋转杆进行平移。
48.振捣棒1与钢套筒2之间设有隔振单元,以此抑制振捣棒1的振动沿钢套筒2方向传递。具体实施时,隔振单元可选为橡胶块等阻尼材料。
49.本发明适用于箱梁腹板的振捣如图3所示,导轨5可设于箱梁模板上。在装置未启用时,振捣棒1及多层套筒处于回缩状态,且与横梁4呈90
°
夹角,此时振捣棒1底端与箱梁顶板钢筋保持有一定垂直距离。
50.腹板振捣过程
51.振捣前本发明需先由操作者在控制机构8处选择预设振捣路径。在自动控制机构的控制下,装置在滑车6的驱动下先沿导轨5从梁一侧行走至另一侧,期间信息摄像机7通过图像记录采集顶、腹板钢筋布置情况并与预设情况进行对比,据此微调振捣棒1插入的位置。
52.在控制机构8的控制下,整个装置沿纵向轨道5移动至需要振捣的腹板位置处。到
达指定位置后,旋转单元3转动带动多层钢套筒2及振捣棒1转动至指定倾角。而后振捣棒1先伸长至最大长度,多层套筒2继续伸长使振捣棒1底端达到预设深度。而后振捣棒1启动振捣,达到预设时间后停止振捣。
53.在控制机构8的控制下,振捣棒1与多层钢套筒2同时收缩至最短长度。随后整个装置沿纵向轨道5移动至下一振捣位置处并重复上一过程。
54.在本发明沿导轨5行进过程中信息采集机构会定时工作,通过摄像机7的图像拍摄采集钢筋的位置信息来校正自身的参数。
55.顶板振捣过程
56.振捣顶板时,在控制机构8的控制下,腹板处较长振捣棒1及钢套筒2回缩至顶板钢筋以上。整个装置沿纵向轨道5移动至需要振捣的顶板位置处。而后所需振捣顶板出对应振捣棒1伸长插入至混凝土中,达到预设深度后启动振捣。达到预设深度后停止振捣,具体参见图5。
57.在控制机构8的控制下,振捣棒1收缩至最短长度。随后整个装置沿纵向轨道5移动至下一振捣位置处并重复上一过程。
58.在本发明沿导轨5行进过程中信息采集机构会定时工作,通过摄像机7的图像拍摄采集钢筋的位置信息来校正自身的参数。
59.以上过程除最初的振捣路径设置外均不需要操作者的参与,实现了全过程的自动化,可大大减少施工人员的数量,振捣位置、深度与时间也得到了保证。
60.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。