1.本发明涉及无人机应用技术领域,具体是涉及一种设置在杆塔上的无人机机库。
背景技术:
2.在草原或者山林地区,电力线路的巡检工作量巨大,需要耗费大量的人力财力,近年来,采用无人机进行输电线路的巡检工作能够解决这一问题;为响应国家全面推进乡村振兴加快农业农村现代化的号召,基于目前的输电线路无人机巡航技术,进行草原和山林的防火、防鼠害等工作,实现线路巡航和农牧区综合智慧管理。
3.但目前的无人机巡检存在续航时间短、巡检距离近的问题,虽然目前已有一些无人机停靠充电平台和无人机亭机场的报道,但都过于简单、不能够对多架无人机进行综合智能管理。
技术实现要素:
4.为了克服现有技术存在的缺点,本发明提出了一种设置在杆塔上的无人机机库。可以无人机的自动充电、自动停机入库和自动出库起飞。
5.本发明提供一种设置在杆塔上的无人机机库,包括支撑部分、机库(24)和光伏发电部分;所述的机库(24)包括升降机构、运送机构和机室(4);所述机库(24)设置在支撑部分上,所述光伏发电部分设置在机库(24)上,所述机库(24)为自动停机机库,所述的光伏发电部分包括光伏板和控制光伏板的旋转装置,光伏板的旋转根据太阳光与无人机起降时的风向调整角度旋转。
6.所述的支撑部分包括支架a(3)、底板(2)及相应的斜撑杆,支架a(3)通过螺栓固定连接在杆塔(1)上,支架a(3)上设置有底板(2),底板(2)上设置机库(24);或支架a(3)通过抱箍固定连接在杆塔(1)上,底板(2)固定在支架a(3)上。
7.所述的升降机构为,机库(24)中部设置有4根立柱(9),前方2个立柱(9)上端通过从动轴b(14)连接,下端通过从动轴a(10-5)连接,从动轴b(14)和从动轴a(10-5)的两端均固定设置齿形轮(7),齿形轮(7)上设置齿形带(8),齿形轮(7)和齿形带(8)配合连接;升降台(11)与齿形带(8)固定连接;
8.所述的升降机构的驱动机构为,电机(10-3)通过齿轮a(10-1)和齿轮b(10-2)与主动轴(10-4)连接,主动轴(10-4)两端通过齿轮a(10-1)和齿轮b(10-2)与2个从动轴a(10-5)连接,从动轴a(10-5)带动齿形轮(7)转动,从而带动齿形带(8)和从动轴b(14)转动,齿轮a(10-1)和齿轮b(10-2)为45
°
斜齿轮。
9.所述的运送机构为,升降台(11)上固定设置有垂直交叉的2组活动轨道(13),活动轨道(13)向四个方向延伸至轨道断口(25),机库(24)还设置有固定轨道(6),固定轨道(6)一端固定于机库(24)内壁,并通过轨道支杆(26)固定;每组轨道均设置2根,2根轨道之间设置有轨道撑板(27),活动轨道(13)上方设置运送车(12),运送车(12)经过轨道断口(25)后可运行至固定轨道(6)。
10.所述的升降台(11)中心位置,即2组轨道的交叉区域设置为无线充电装置,为运送车(12)提供电能。
11.所述的运送车(12)底部4角设置有4个万向滚轮(12-12),底部中间部位设置有驱动轮(12-9),驱动轮(12-9)固定连接有转向齿圈(12-10),双头电机(12-6)下方的小齿圈a(12-7)与转向齿圈(12-10)啮合,驱动电机(12-11)经过驱动箱后连接于驱动轮(12-9)上,驱动电机(12-11)上设置有制动器(12-8),双头电机(12-6)上方的小齿圈b(12-4)与转动齿圈(12-3)啮合,转动齿圈(12-3)与转动平台(12-1)通过中心轴固定连接;
12.驱动电机(12-11)用于控制驱动轮(12-9)的行驶,双头电机(12-6)控制驱动轮(12-9)和转动平台(12-1)的同步转向;
13.转动平台(12-1)一侧设置有液压升降杆(12-5),液压升降杆(12-5)上方连接有u形托架(12-2);u形托架(12-2)降至最低档时嵌入转动平台(12-1)。
14.所述的机室(4)设置为4-8个,机室(4)内设置有停机台(5),停机台(5)上设置有压敏传感器和充电触点;无人机底部设置有充电接口,无人机停靠后充电接口与充电触点接触导电,实现自动充电。
15.所述的光伏发电部分设置在机库(24)上方,设置有3组光伏板(18),每个光伏板(18)通过其下方的光伏板支架(17)连接2组旋转装置(16),旋转装置(16)下方通过支架b(15)连接机库(24)的顶面。
16.太阳能底座(21)中心位置设置有自动门(19),自动门(19)下方设置机库通道(20),机库通道(20)与升降台(11)的升降空间相连通。
17.机库(24)内设置有蓄电池,其与光伏发电部分电连接,储存光伏发电部分所发电能,停机台(5)上的充电触点、升降台(11)上的无线充电装置、自动门(19)的驱动部分、控制器(23)、电机(10-3)、减速电机(16-1)均与蓄电池电连接;
18.控制器(23)与自动门(19)的驱动部分、电机(10-3)、减速电机(16-1)、压敏传感器弱电连接;
19.控制器(23)控制自动门(19)的驱动部分、电机(10-3)、减速电机(16-1)的开关;
20.控制器(23)与运送车(12)无线控制连接,控制运送车(12)上的驱动电机(12-11)、双头电机(12-6)和液压升降杆(12-5);实现运送车的转向、行驶和u形托架(12-2)的起降。
21.所述的机库(24)上还设置有雷达探测装置,对无人机进行探测,探测到无人机降落时,向控制器(23)发出信号。
22.所述的控制器(23)通过网络与软件系统远程连接,可以通过手机或者电脑远程控制机库中飞机的起飞和降落。
23.所述的无人机上设置有红外热像仪和摄像装置,无人机的中控系统可以根据红外热像仪和摄像装置采集到的机库图像,控制无人机的降落到准确位置。
24.该机库实现无人机自动停机的流程为:
25.s1,雷达探测装置探测到有无人机降落时,控制器(23)控制6个减速电机(16-1)同时打开,使3个光伏板(18)向上折起,3个光伏板(18)和太阳能底座(21)组成簸箕状,防止横风对无人机降落的影响,同时,启动电机(10-3),使升降台(11)升至自动门(19)下方;
26.s2,无人机降至簸箕状空间内时,控制器(23)打开自动门(19),无人机降落至运送车(12);
27.s3,电机(10-3)工作,使升降台(11)和活动轨道(13)降至需要停放无人机的高度,活动轨道(13)和固定轨道(6)对接,运送车(12)行走,若运送车(12)朝向与预期方向不一致,则驱动轮(12-9)和转动平台(12-1)同时转向至正确方向,运送车(12)行走过程中的同时u形托架(12-2)升起,将无人机托起,并随运送车(12)的行驶将无人机推送至停机台(5);
28.s4,运送车(12)退回至中间位置,降落u形托架(12-2),即完成无人机自动停机入库。
29.其无人机自动起飞流程为:
30.接收系统派发无人机起飞的指令后,控制器(23)根据库存飞机的电量状态,选择起飞的无人机,发出起飞指令,同时,控制器(23)控制6个减速电机(16-1)同时打开,使3个光伏板(18)向上折起,3个光伏板(18)和太阳能底座(21)组成簸箕状,运送车(12)根据指令行驶至待起飞的无人机的停机台(5),同时部分升起u形托架(12-2),u形托架(12-2)升起托起无人机后,运送车(12)转向后返回升降台(11)中心位置,u形托架(12-2)下降收起至转动平台(12-1)内,然后电机(10-3)工作,使升降台(11)和活动轨道(13)升起,自动门(19)打开,转动平台(12-1)升至与太阳能底座(21)水平,即完成无人机自动出库起飞。
31.本发明的有益效果在于:本发明将无人机机库设置在线路杆塔上,可以为线路巡航无人机提供充电和储存场所,并通过系统控制,采用轨道和升降机构相结合的方式,实现无人机的自动停放和起飞;所述无人机上设置有信息采集装置和信息发送装置,与信息发送装置相对应的基地还设置有信息接收装置。
附图说明
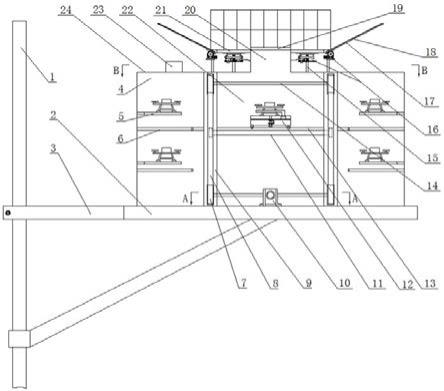
32.图1为本发明的结构示意图;
33.图2为本发明图1的俯视图;
34.图3为本发明图1的b-b剖视图;
35.图4为本发明图1的a-a剖视图;
36.图5为本发明旋转结构的结构示意图;
37.图6为本发明图5的c-c剖视图;
38.图7为本发明图5的d-d剖视图;
39.图8为本发明运送车的结构示意图;
40.图中:1、杆塔,2、底板,3、支架a,4、机室,5、停机台,6、固定轨道,7、齿形轮,8、齿形带,9、立柱,10、传动装置,10-1、齿轮a,10-2、齿轮b,10-3、电机,10-4、主动轴,10-5、从动轴a,11、升降台;
41.12、运送车,12-1、转动平台,12-2、u形托架,12-3、转动齿圈,12-4、小齿圈b,12-5、液压升降杆,12-6、双头电机,12-7、小齿圈a,12-8、制动器,12-9、驱动轮,12-10、转向齿圈,12-11、驱动电机,12-12、万向滚轮;
42.13、活动轨道,14、从动轴b,15、支架b;
43.16、旋转装置,16-1、减速电机,16-2、转向器壳体,16-3、蜗杆轴,16-4、涡轮,16-5、联轴器,16-6、软轴,16-7、轴承座,16-8、轴承,16-9、旋转支架,16-10、平键,16-11、螺栓,16-12、法兰盘,16-13、光伏支架组件,16-14、圆锥齿轮a,16-15、圆锥齿轮b,16-16、传动轴;
44.17、光伏板支架,18、光伏板,19、自动门,20、机库通道、21、太阳能底座,22、升降空
间,23、控制器,24、机库,25,轨道断口,26、轨道支杆,27、轨道撑板。
具体实施方式
45.实施例1,本发明提供一种设置在杆塔上的无人机机库,包括支撑部分、机库(24)和光伏发电部分;所述的机库(24)包括升降机构、运送机构和机室(4);所述机库(24)设置在支撑部分上,所述光伏发电部分设置在机库(24)上,所述机库(24)为自动停机机库,所述的光伏发电部分包括光伏板和控制光伏板的旋转装置,光伏板的旋转根据太阳光与无人机起降时的风向调整角度旋转。
46.所述的支撑部分包括支架a(3)、底板(2)及相应的斜撑杆,支架a(3)通过螺栓固定连接在杆塔(1)上,支架a(3)上设置有底板(2),底板(2)上设置机库(24);或支架a(3)通过抱箍固定连接在杆塔(1)上,底板(2)固定在支架a(3)上。
47.所述的升降机构为,机库(24)中部设置有4根立柱(9),前方2个立柱(9)上端通过从动轴b(14)连接,下端通过从动轴a(10-5)连接,从动轴b(14)和从动轴a(10-5)的两端均固定设置齿形轮(7),齿形轮(7)上设置齿形带(8),齿形轮(7)和齿形带(8)配合连接;升降台(11)与齿形带(8)固定连接;
48.所述的升降机构的驱动机构为,电机(10-3)通过齿轮a(10-1)和齿轮b(10-2)与主动轴(10-4)连接,主动轴(10-4)两端通过齿轮a(10-1)和齿轮b(10-2)与2个从动轴a(10-5)连接,从动轴a(10-5)带动齿形轮(7)转动,从而带动齿形带(8)和从动轴b(14)转动,齿轮a(10-1)和齿轮b(10-2)为45
°
斜齿轮。
49.所述的运送机构为,升降台(11)上固定设置有垂直交叉的2组活动轨道(13),活动轨道(13)向四个方向延伸至轨道断口(25),机库(24)还设置有固定轨道(6),固定轨道(6)一端固定于机库(24)内壁,并通过轨道支杆(26)固定;每组轨道均设置2根,2根轨道之间设置有轨道撑板(27),活动轨道(13)上方设置运送车(12),运送车(12)经过轨道断口(25)后可运行至固定轨道(6)。
50.所述的升降台(11)中心位置,即2组轨道的交叉区域设置为无线充电装置,为运送车(12)提供电能。
51.所述的运送车(12)底部4角设置有4个万向滚轮(12-12),底部中间部位设置有驱动轮(12-9),驱动轮(12-9)固定连接有转向齿圈(12-10),双头电机(12-6)下方的小齿圈a(12-7)与转向齿圈(12-10)啮合,驱动电机(12-11)经过驱动箱后连接于驱动轮(12-9)上,驱动电机(12-11)上设置有制动器(12-8),双头电机(12-6)上方的小齿圈b(12-4)与转动齿圈(12-3)啮合,转动齿圈(12-3)与转动平台(12-1)通过中心轴固定连接;
52.驱动电机(12-11)用于控制驱动轮(12-9)的行驶,双头电机(12-6)控制驱动轮(12-9)和转动平台(12-1)的同步转向;
53.转动平台(12-1)一侧设置有液压升降杆(12-5),液压升降杆(12-5)上方连接有u形托架(12-2);u形托架(12-2)降至最低档时嵌入转动平台(12-1)。
54.所述的机室(4)设置为4-8个,机室(4)内设置有停机台(5),停机台(5)上设置有压敏传感器和充电触点;无人机底部设置有充电接口,无人机停靠后充电接口与充电触点接触导电,实现自动充电。
55.所述的光伏发电部分设置在机库(24)上方,设置有3组光伏板(18),每个光伏板
(18)通过其下方的光伏板支架(17)连接2组旋转装置(16),旋转装置(16)下方通过支架b(15)连接机库(24)的顶面。
56.所述的旋转装置(16)的结构为,转向器壳体(16-2)的底部通过螺栓与支架b(15)固定连接,所述转向器壳体(16-2)内部的蜗杆轴(16-3)支承在轴承(16-8)上,所述轴承(16-8)侧边用法兰盘(16-12)固定,涡轮(16-4)通过平键(16-10)与传动轴(16-16)固定连接,传动轴(16-16)支承在轴承(16-8)上,轴承(16-8)侧边用法兰盘(16-12)固定,并固定设置在轴承座(16-7)上,所述轴承座(16-7)通过螺栓固定在支架b(15)的上平面,传动轴(16-16)两边通过平键与旋转支架(16-9)固定连接,所述旋转支架(16-9)通过螺栓(16-11)与光伏板支架(17)固定连接,所述减速电机(16-1)通过连接轴上设置的圆锥齿轮a(16-14)与圆锥齿轮b(16-15)啮合传动,所述连接轴后端与联轴器(16-5)前端固定连接, 联轴器(16-5)后端与软轴(16-6)固定连接,所述蜗杆轴(16-3)旋转带动涡轮(16-4)转动,涡轮(16-4)旋转带动传动轴(16-16)转动,传动轴(16-16)旋转带动光伏支架组件(16-13)转动,光伏支架组件(16-13)带动光伏板支架(17)旋转。
57.太阳能底座(21)中心位置设置有自动门(19),自动门(19)下方设置机库通道(20),机库通道(20)与升降台(11)的升降空间相连通。
58.机库(24)内设置有蓄电池,其与光伏发电部分电连接,储存光伏发电部分所发电能,停机台(5)上的充电触点、升降台(11)上的无线充电装置、自动门(19)的驱动部分、控制器(23)、电机(10-3)、减速电机(16-1)均与蓄电池电连接;
59.控制器(23)与自动门(19)的驱动部分、电机(10-3)、减速电机(16-1)、压敏传感器弱电连接;
60.控制器(23)控制自动门(19)的驱动部分、电机(10-3)、减速电机(16-1)的开关;
61.控制器(23)与运送车(12)无线控制连接,控制运送车(12)上的驱动电机(12-11)、双头电机(12-6)和液压升降杆(12-5);实现运送车的转向、行驶和u形托架(12-2)的起降。
62.所述的机库(24)上还设置有雷达探测装置,对无人机进行探测,探测到无人机降落时,向控制器(23)发出信号。
63.所述的控制器(23)通过网络与软件系统远程连接,可以通过手机或者电脑远程控制机库中飞机的起飞和降落。
64.所述的无人机上设置有红外热像仪和摄像装置,无人机的中控系统可以根据红外热像仪和摄像装置采集到的机库图像,控制无人机的降落到准确位置。
65.该机库实现无人机自动停机的流程为:
66.s1,雷达探测装置探测到有无人机降落时,控制器(23)控制6个减速电机(16-1)同时打开,使3个光伏板(18)向上折起,3个光伏板(18)和太阳能底座(21)组成簸箕状,防止横风对无人机降落的影响,同时,启动电机(10-3),使升降台(11)升至自动门(19)下方;
67.s2,无人机降至簸箕状空间内时,控制器(23)打开自动门(19),无人机降落至运送车(12);
68.s3,电机(10-3)工作,使升降台(11)和活动轨道(13)降至需要停放无人机的高度,活动轨道(13)和固定轨道(6)对接,运送车(12)行走,若运送车(12)朝向与预期方向不一致,则驱动轮(12-9)和转动平台(12-1)同时转向至正确方向,运送车(12)行走过程中的同时u形托架(12-2)升起,将无人机托起,并随运送车(12)的行驶将无人机推送至停机台(5);
69.s4,运送车(12)退回至中间位置,降落u形托架(12-2),即完成无人机自动停机入库。
70.其无人机自动起飞流程为:
71.接收系统派发无人机起飞的指令后,控制器(23)根据库存飞机的电量状态,选择起飞的无人机,发出起飞指令,同时,控制器(23)控制6个减速电机(16-1)同时打开,使3个光伏板(18)向上折起,3个光伏板(18)和太阳能底座(21)组成簸箕状,运送车(12)根据指令行驶至待起飞的无人机的停机台(5),同时部分升起u形托架(12-2),u形托架(12-2)升起托起无人机后,运送车(12)转向后返回升降台(11)中心位置,u形托架(12-2)下降收起至转动平台(12-1)内,然后电机(10-3)工作,使升降台(11)和活动轨道(13)升起,自动门(19)打开,转动平台(12-1)升至与太阳能底座(21)水平,即完成无人机自动出库起飞,所述无人机上设置有信息采集装置和信息发送装置,与信息发送装置相对应的基地还设置有信息接收装置。