1.本发明涉及切削装置,其具有分别收纳对被加工物进行分割而制造的一个以上的芯片的多个容器。
背景技术:
2.在由金属、树脂等形成的基板上配置了多个半导体器件芯片之后,利用树脂对该基板和半导体器件芯片进行密封,由此形成封装基板(被加工物)。在将该封装基板分割成多个芯片的情况下,使用切削装置(例如参照专利文献1)。
3.切削装置具有对封装基板进行吸引保持的保持工作台。在保持工作台的上方配置有具有切削刀具的切削单元。在对封装基板进行分割时,首先在使设定于封装基板的正面的多条分割预定线与形成于保持工作台的多个退刀槽对位的状态下利用保持工作台直接吸引封装基板而进行保持。
4.接着,利用切削刀具沿着分割预定线对封装基板进行切削而分割成多个芯片。多个芯片在利用清洗单元清洗并进一步利用干燥单元干燥之后,经过形成于干燥单元的附近的贯通开口而被搬送至配置于贯通开口的下方的收纳单元。
5.以往的收纳单元具有移动载台和配置于移动载台上的两个罐(容器)。各罐具有圆筒形状,在圆筒的上部具有与贯通开口对应的大小的开口。在移动载台上连结有气缸,利用气缸使移动载台沿着规定的直线方向移动,由此仅将任意一个罐定位于贯通开口的正下方。
6.在气缸上设置有气缸传感器。例如在第1罐处于贯通开口的正下方的情况下,气缸传感器成为第1状态(例如关闭状态),在第2罐处于贯通开口的正下方的情况下,气缸传感器成为第2状态(例如打开状态)。因此,使用气缸传感器来确定哪个罐位于贯通开口的正下方。
7.专利文献1:日本特开2011-49193号公报
8.在罐的数量为两个的情况下,能够利用气缸传感器的两个状态来确定罐的位置。但是,当罐的数量成为三个以上时,无法利用气缸传感器的两个状态来确定罐的位置。
技术实现要素:
9.本发明是鉴于该问题点而完成的,其目的在于提供切削装置,该切削装置代替气缸传感器而具有能够确定罐的位置的新的传感器单元。
10.根据本发明的一个方式,提供切削装置,其中,该切削装置具有:保持工作台,其对被加工物进行保持;切削单元,其具有安装切削刀具的主轴,该切削单元将该保持工作台所保持的该被加工物分割成多个芯片;收纳单元,其具有旋转台和多个容器,该旋转台配置于比该保持工作台靠下方的位置,该多个容器沿着该旋转台的周向而配置,分别收纳至少一个芯片;旋转驱动单元,其与该旋转台的下部连结,能够使该旋转台绕规定的旋转轴每次旋转规定的角度;板部件,其在该旋转台的下方绕该旋转轴而连结,该板部件在与该多个容器
中的各个容器对应的区域设置有用于确定位于各区域的上方的容器的光学特征;光传感器单元,其配置于该板部件的外周部的一部分,具有一个以上的光传感器,每当该板部件以该规定的角度进行旋转时,该光传感器单元能够检测与一个容器对应的该光学特征;以及位置确定单元,其具有处理器,该位置确定单元根据来自该光传感器单元的信号而至少确定与该光学特征对应的该一个容器的位置。
11.优选该光学特征具有沿着该板部件的周向分别离散地设置的沿厚度方向贯通该板部件的贯通区域和非贯通区域中的至少一个以上,该贯通区域和该非贯通区域中的至少一个以上的在该周向上的排列按照与该多个容器中的各个容器对应的每个区域而不同,该一个以上的光传感器中的各个光传感器与该贯通区域对应而生成第1信号,与该非贯通区域对应而生成第2信号,该位置确定单元根据该第1信号和该第2信号中的至少任意一个信号而确定与该光学特征对应的该一个容器的位置。
12.另外,优选该收纳单元具有n个容器,该光学特征形成于将该板部件在周向上n等分而得的多个区域中的各个区域中,该n是3以上的自然数。
13.另外,优选在该位置确定单元中预先存储有与该多个容器中的各个容器对应的光学特征的位置关系,该位置确定单元根据来自确定该一个容器的位置的该光传感器单元的信号和该位置关系而确定所有的容器的位置。
14.本发明的一个方式的切削装置具有收纳单元。收纳单元具有旋转台,在旋转台上沿着旋转台的周向配置有分别收纳至少一个芯片的多个容器。在旋转台的下部连结有能够使旋转台绕规定的旋转轴每次旋转规定的角度的旋转驱动单元。
15.在旋转台的下方,绕旋转轴而连结有板部件。在板部件上,在与多个容器中的各个容器对应的区域设置有用于确定位于各区域的上方的容器的光学特征。
16.切削装置还具有配置于板部件的外周部的一部分的光传感器单元。光传感器单元具有一个以上的光传感器,每当板部件以规定的角度进行旋转时,该光传感器单元能够检测与一个容器对应的光学特征。切削装置还包含位置确定单元,该位置确定单元根据来自光传感器单元的信号而至少确定与光学特征对应的一个容器的位置。
17.例如在沿着旋转台的周向配置三个容器且使旋转台每次旋转120
°
的情况下,板部件也每次旋转120
°
。每当板部件进行旋转时,利用光传感器单元检测一个光学特征,由此能够检测与一个光学特征对应的容器位于该光学特征的上方。因此,即使在收纳单元具有三个以上的容器的情况下,也能够根据各光学特征而确定容器的位置。
附图说明
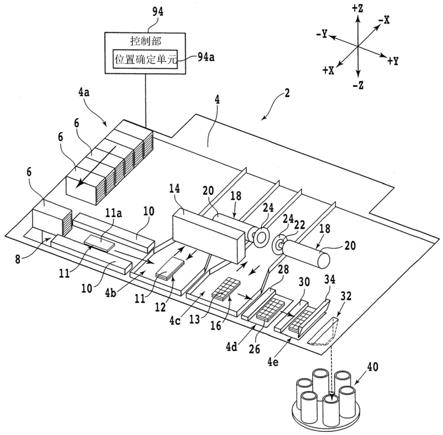
18.图1是切削装置的立体图。
19.图2是收纳单元等的立体图。
20.图3是旋转驱动单元的俯视图。
21.图4是板部件的俯视图。
22.图5是板部件和光传感器单元的俯视图。
23.图6的(a)是示出激光束通过贯通区域的情况的图,图6的(b)是示出激光束被非贯通区域遮蔽的情况的图。
24.图7是第2实施方式的板部件的俯视图。
25.图8的(a)是示出强度为规定值以上的光从高反射区域反射的情况的图,图8的(b)是示出强度不足规定值的光从低反射区域反射的情况的图。
26.标号说明
27.2:切削装置;4:基台;4a:盒载置区域;4b:对位区域;4c:切削区域;4d:清洗区域;4e:干燥区域;6:盒;8:盒升降机;10:导轨;11:被加工物;11a:正面;12:第1保持工作台;13:芯片;14:显微镜相机单元;16:第2保持工作台;18:切削单元;20:主轴壳体;22:主轴;24:切削刀具;26:第3保持工作台;28:清洗单元;30:干燥单元;32:贯通开口;34:刮板;40:收纳单元;42:旋转台;42a:周向;44:罐;44-1:第1罐;44-2:第2罐;44-3:第3罐;44-4:第4罐;44-5:第5罐;44-6:第6罐;44a:开口;46:旋转轴;48:旋转驱动单元;50:气缸;50a:缸筒;50b:活塞杆;52:基座基台;54:箭头;56:保持块;58:旋转轴;60:片;62:臂部;64:爪部;66:齿轮;66a:齿;70:板部件;70a:第1区域;70b:第2区域;70c:第3区域;70d:第4区域;70e:第5区域;70f:第6区域;72:周向;74:光学特征;74a:贯通区域;74b:非贯通区域;80:光传感器单元;82:基座部;84a:第1上方臂部;84b:第2上方臂部;84c:第3上方臂部;86a:第1下方臂部;88a:第1光传感器;88b:第2光传感器;88c:第3光传感器;90a:发光二极管;91:第1信号;92:第2信号;94:控制部;94a:位置确定单元;96:板部件;98a:高反射区域;98b:低反射区域;l:激光束。
具体实施方式
28.参照附图对本发明的一个方式的实施方式进行说明。图1是第1实施方式的切削装置2的立体图。在图1中,用框图示出切削装置2的构成要素的一部分。
29.另外,在以下的说明中所使用的x轴方向(加工进给方向)、y轴方向(分度进给方向)和z轴方向(高度方向、切入进给方向)相互垂直。切削装置2具有对各构成要素进行支承的基台4。
30.在基台4的y轴方向的一侧(-y侧)设置有盒载置区域4a。在盒载置区域4a分别配置有长方体状的多个盒6。在各盒6中沿着盒6的高度方向设置有多个搁板部(未图示)。
31.在一个搁板部上配置有一个被加工物11。本实施方式的被加工物11是矩形板状的树脂封装基板。例如在由金属、树脂等形成的基板(未图示)上搭载多个半导体器件芯片(未图示)并利用树脂对该基板和半导体器件芯片进行密封,由此制造树脂封装基板。
32.在被加工物11的正面11a上呈格子状设定有多条分割预定线(未图示)。在由多条分割预定线划分的各区域内配置有一个半导体器件芯片。
33.相对于盒载置区域4a在x轴方向的一侧(+x侧)设置有盒升降机8。盒升降机8具有能够沿着z轴方向移动的升降机构(未图示)以及设置于升降机构的上部的升降台(未图示)。
34.相对于盒升降机8在y轴方向的另一侧(+y侧)沿着y轴方向配置有一对导轨10。在利用升降机构调整了配置于升降台上的盒6的高度之后,通过第1搬送机构(未图示)将一个被加工物11从盒6向一对导轨10之间搬送。
35.一对导轨10按照相互接近的方式在x轴方向上移动,由此调整被加工物11的x轴方向的位置。在一对导轨10的+y侧设置有对位区域4b。
36.被加工物11通过第1搬送机构从一对导轨10搬送至配置于对位区域4b的第1保持
工作台12。第1保持工作台12是与被加工物11的形状对应的矩形板状的卡盘工作台。
37.在第1保持工作台12的下部连结有电动机等第1旋转驱动源(未图示)的输出轴,第1保持工作台12能够绕与z轴方向大致平行的旋转轴旋转。
38.在第1保持工作台12的上表面上形成有多个吸引口(未图示)。在各吸引口上连接有一端与喷射器等吸引源(未图示)连接的流路(未图示)的另一端。
39.当使吸引源所产生的负压传递至各吸引口时,在第1保持工作台12的上表面(保持面)上产生负压。在第1保持工作台12的上方设置有位置调整用的显微镜相机单元14。
40.在利用第1保持工作台12的保持面对被加工物11的背面侧进行吸引保持的状态下,通过显微镜相机单元14拍摄被加工物11的正面11a侧。并且,根据所获取的图像来确定分割预定线等。
41.然后,按照分割预定线与x轴方向大致平行的方式使第1保持工作台12旋转。在对位区域4b的+y侧设置有切削区域4c。在切削区域4c配置有第2保持工作台16。
42.利用第1保持工作台12调整了朝向的被加工物11通过第1搬送机构搬送至第2保持工作台16。第2保持工作台16是与被加工物11的形状对应的矩形板状的卡盘工作台。
43.第2保持工作台16具有固定治具和对固定治具进行吸引保持的治具基座。在固定治具上,在与各分割预定线对应的位置形成有退刀槽(未图示)。即,在固定治具上呈格子状形成有多个退刀槽。
44.在由多个退刀槽划分的各区域内形成有对分割后的各个芯片13进行吸引的吸引口(未图示)。在各吸引口连接有一端与上述吸引源(未图示)连接的流路(未图示)的另一端。当使吸引源所产生的负压传递至各吸引口时,在第2保持工作台16的上表面(保持面)上产生负压。
45.在第2保持工作台16的下部连结有电动机等第2旋转驱动源(未图示)的输出轴,第2保持工作台16能够绕与z轴方向大致平行的旋转轴旋转。
46.在第2旋转驱动源的下部配置有滚珠丝杠式的x轴移动机构(未图示)。若使x轴移动机构移动,则第2保持工作台16与第2旋转驱动源一起沿着x轴方向移动。
47.在第2保持工作台16的上方也设置有显微镜相机单元14。在利用第2保持工作台16的保持面对被加工物11的背面侧进行吸引保持的状态下,根据通过显微镜相机单元14拍摄正面11a侧而得的图像来确定分割预定线等。
48.在比显微镜相机单元14靠x轴方向的另一侧(-x侧)的位置配置有一对切削单元18。切削单元18具有长边部与y轴方向大致平行地配置的圆筒状的主轴壳体20。
49.在主轴壳体20上连结有y轴移动机构和z轴移动机构(均未图示)。主轴壳体20通过y轴移动机构调整分度进给方向的位置,通过z轴移动机构调整切入进给方向的位置。
50.在主轴壳体20中以能够旋转的方式收纳有圆柱状的主轴22的一部分。在主轴22的一个端部连结有电动机等第3旋转驱动源的输出轴。
51.在主轴22的另一端部安装有具有圆环状的切刃的切削刀具24。在对被加工物11进行切削时,首先利用第2保持工作台16的保持面对被加工物11的背面侧进行吸引保持。并且,使用显微镜相机单元14、第2旋转驱动源等,使分割预定线与x轴方向大致平行。
52.接着,使一个切削单元18的切削刀具24高速旋转,将切削刀具24配置于一条分割预定线的延长线上,将切削刀具24的下端定位于固定治具的退刀槽的底部与第2保持工作
台16的保持面之间。
53.当在该状态下使第2保持工作台16沿着x轴方向移动时,将被加工物11沿着一条分割预定线进行切削。在沿着一个方向上的所有分割预定线对被加工物11进行了切削之后,使第2保持工作台16旋转90
°
,使与一个方向垂直的另一方向的分割预定线与x轴方向大致平行。
54.然后,沿着另一方向的所有分割预定线对被加工物11进行切削。由此,被加工物11被分割成多个芯片13。在切削区域4c的+y侧设置有清洗区域4d。
55.多个芯片13在通过第2搬送机构(未图示)对正面侧进行吸引保持的状态下被搬送至清洗区域4d。在清洗区域4d设置有对多个芯片13的背面侧进行吸引保持的第3保持工作台26。
56.在第3保持工作台26的下方连结有滚珠丝杠式的y轴移动机构(未图示)。若使y轴移动机构进行动作,则第3保持工作台26沿着y轴方向移动。
57.在清洗区域4d中,在第3保持工作台26的上方设置有清洗单元28,该清洗单元28具有朝向下方喷射纯水等清洗水的喷嘴。利用清洗水对背面侧被第3保持工作台26吸引保持的多个芯片13的正面侧进行清洗。
58.在清洗区域4d的+y侧设置有干燥区域4e。在干燥区域4e中,在与清洗单元28大致相同的高度位置配置有干燥单元30。干燥单元30具有用于朝向下方喷射干燥空气的喷嘴。
59.在清洗后,使第3保持工作台26移动至干燥区域4e,利用干燥空气使多个芯片13的正面侧干燥。另外,虽然在图1中未图示,但可以设置有对各芯片13的背面侧进行清洗的清洗单元和对各芯片13的背面侧进行干燥的干燥单元。
60.在干燥区域4e的+y侧形成有在x轴方向上具有长边部的矩形状的贯通开口32。干燥后的多个芯片13通过配置于第3保持工作台26的上方的刮板34向贯通开口32被扫出。
61.在贯通开口32的下部设置有规定的斜面(未图示),在斜面的下方配置有收纳单元40。即,收纳单元40配置于比第2保持工作台16和第3保持工作台26靠下方的位置。
62.图2是收纳单元40等的立体图。收纳单元40具有圆盘状的旋转台42。旋转台42的上表面配置成与xy平面大致平行。在旋转台42的上表面上沿着旋转台42的周向42a配置有多个罐(容器)44。
63.各罐44是有底筒状,在上部具有开口44a。向贯通开口32扫出的至少一个芯片13通过斜面而被收纳于配置于斜面的正下方的一个罐44中。
64.在旋转台42的下部连结有与z轴方向大致平行地配置的圆柱状的旋转轴46的上端部。在旋转轴46的下端部连结有能够使旋转轴46每次旋转规定的角度的旋转驱动单元48(参照图3)。
65.图3是旋转驱动单元48的俯视图。旋转驱动单元48具有与xy平面大致平行地配置的气缸50。气缸50的缸筒50a相对于位于旋转台42的下方的基座基台52固定。
66.缸筒50a沿相对于x轴和y轴倾斜的方向配置。在缸筒50a中以能够在箭头54的方向上进退的方式收纳有活塞杆50b的一部分。
67.在活塞杆50b的前端部固定有保持块56的一端部。在保持块56的另一端部固定有与z轴方向大致平行的旋转轴58。在旋转轴58上以能够旋转的方式连结有片60。
68.片60具有规定长度的臂部62,该臂部62的前端部以能够旋转的方式与旋转轴46连
结。当活塞杆50b向箭头54的方向突出时,片60以臂部62作为半径而旋转。
69.在位于与旋转轴46相反侧的臂部62的基端部且在片60的下表面侧固定有板状的爪部64。爪部64按照与固定于旋转轴46的平板状的齿轮66的齿66a啮合的方式配置。
70.在齿轮66上沿着齿轮66的周向大致等间隔地形成有六个齿66a。如图3的双点划线所示那样,在活塞杆50b的突出量最小时,爪部64与一个齿66a啮合。
71.与此相对,如图3的实线所示那样,当活塞杆50b的突出量变为最大时,通过爪部64使齿轮66顺时针旋转60
°
。此后,当活塞杆50b的突出量再次变为最小时,爪部64不使齿轮66旋转,爪部64返回至原来的位置。
72.并且,当爪部64返回原来的位置时,与沿与齿轮66的旋转方向相反的方向相邻的其他齿66a啮合。这样,旋转驱动单元48作为通过活塞杆50b的一次行程使旋转轴46旋转60
°
的棘轮机构发挥功能。
73.通过活塞杆52b的n次行程,旋转轴46旋转(60
°×
n)(其中,n是自然数)。因此,旋转台42与旋转轴46的旋转一起每次绕旋转轴46旋转60
°
。
74.接着,参照图2、图4等对配置于旋转台42的下方的板部件70等进行说明。如图2所示,板部件70具有圆环形状,圆环的内周固定于旋转轴46的外周。
75.板部件70绕旋转轴46而连结,因此若利用旋转驱动单元48使旋转轴46旋转规定的角度,则旋转台42和板部件70也与旋转轴46的旋转一起旋转规定的角度。
76.板部件70根据罐44的数量而沿着板部件70的周向72被分割成多个区域。图4是板部件70的俯视图。另外,在图4所示的例子中,将俯视板部件70的情况下的顺时针方向作为周向72。
77.板部件70沿着周向72被六等分成第1区域70a至第6区域70f。为了便于说明,在图4中,在各区域的边界标记虚线,并且用虚线示出罐44。另外,在板部件70中,可以没有各区域的边界线(参照图2)。
78.第1区域70a至第6区域70f分别与一个罐44的位置对应。即,在板部件70中的一个圆弧状的区域的上方配置有一个罐44。
79.在图4中,将位于第1区域70a上的罐44作为第1罐44-1,将位于第2区域70b上的罐44作为第2罐44-2。
80.另外,将位于第3区域70c上的罐44作为第3罐44-3,将位于第4区域70d上的罐44作为第4罐44-4。
81.同样地,将位于第5区域70e上的罐44作为第5罐44-5,将位于第6区域70f上的罐44作为第6罐44-6。
82.在第1区域70a至第6区域70f形成有用于确定各区域的相互不同的光学特征74。在第1实施方式中,各个光学特征74由使激光束通过的贯通区域74a和不使激光束通过的非贯通区域74b中的至少一个以上形成。
83.贯通区域74a在厚度方向上贯通板部件70。与此相对,非贯通区域74b不贯通板部件70。另外,非贯通区域74b可以是平坦的板部件70的一部分,也可以是非贯通状态的凹部或凸部。
84.贯通区域74a和非贯通区域74b沿着周向72分别离散地设置。为了便于说明,在图4中,用黑圈表示贯通区域74a,用虚线圈表示非贯通区域74b。
85.第1区域70a的光学特征74具有沿着周向72形成的三个贯通区域74a。第2区域70b的光学特征74具有沿着周向72依次形成的一个贯通区域74a和两个非贯通区域74b。
86.第3区域70c的光学特征74具有沿着周向72依次形成的一个非贯通区域74b、一个贯通区域74a以及一个非贯通区域74b。第4区域70d的光学特征74具有沿着周向72依次形成的两个非贯通区域74b和一个贯通区域74a。
87.第5区域70e的光学特征74具有沿着周向72依次形成的两个贯通区域74a和一个非贯通区域74b。第6区域70f的光学特征74具有沿着周向72依次形成的三个非贯通区域74b。
88.这样,光学特征74由贯通区域74a和非贯通区域74b的在周向72上的排列构成,按照第1区域70a至第6区域70f的每个区域而不同。
89.在板部件70的外周部的一部分配置有光传感器单元80(参照图5)。图5是板部件70和光传感器单元80的俯视图。光传感器单元80具有块状的基座部82。
90.在基座部82的上表面上固定有第1上方臂部84a、第2上方臂部84b和第3上方臂部84c各自的基端部。在基座部82的下表面上固定有第1下方臂部86a(参照图6的(a)等)、第2下方臂部和第3下方臂部(均未图示)各自的基端部。
91.第1上方臂部84a和第1下方臂部86a按照在z轴方向上重叠的方式配置。同样地,第2上方臂部84b和第2下方臂部按照在z轴方向上重叠的方式配置,第3上方臂部84c和第3下方臂部按照在z轴方向上重叠的方式配置。
92.在第1上方臂部84a的前端部的下表面侧设置有第1光传感器88a。同样地,在第2上方臂部84b的前端部的下表面侧设置有第2光传感器88b,在第3上方臂部84c的前端部的下表面侧设置有第3光传感器88c。
93.另外,在第1下方臂部86a的前端部的上表面侧设置有发光二极管90a(参照图6的(a)等)。同样地,在第2下方臂部的前端部的上表面侧设置有发光二极管(未图示),在第3下方臂部的前端部的上表面侧设置有发光二极管(未图示)。各发光二极管朝向上方照射激光束l(参照图6的(a)等)。
94.在第1区域70a处于光传感器单元80的位置时(参照图5),从三个发光二极管90a等射出的激光束l分别通过不同的贯通区域74a,被第1光传感器88a、第2光传感器88b和第3光传感器88c接受。
95.图6的(a)是示出激光束l通过贯通区域74a的情况的光传感器单元80等的剖视图。与此相对,图6的(b)是示出激光束l被非贯通区域74b遮蔽的情况的光传感器单元80等的剖视图。
96.例如在第6区域70f处于光传感器单元80的位置时(参照图6的(b)),从各发光二极管射出的激光束l均被非贯通区域74b遮蔽,未被第1光传感器88a、第2光传感器88b和第3光传感器88c接受。
97.当第1光传感器88a、第2光传感器88b和第3光传感器88c分别接受通过了贯通区域74a的激光束l时,生成第1信号91(例如高电平电压信号)并将第1信号91发送至控制部94。
98.与此相对,第1光传感器88a、第2光传感器88b和第3光传感器88c在分别被非贯通区域74b遮蔽激光束l的情况下,生成第2信号92(例如低电平电压信号)并将第2信号92发送至控制部94。
99.当为了便于说明而将第1信号91用“1”表示,将第2信号92用“0”表示时,第1区域
70a至第6区域70f的各个区域中的光学特征74如下述表1所示那样置换成1和0的排列。
100.【表1】
[0101][0102]
这样,一个光学特征74与一个罐44对应,因此若利用光传感器单元80检测到光学特征74,则能够确定第1罐44-1至第6罐44-6中的哪个罐处于光传感器单元80的位置。
[0103]
这里,返回图1对切削装置2的其他构成要素进行说明。盒升降机8、一对导轨10、第1保持工作台12、显微镜相机单元14、第2保持工作台16、切削单元18、第3保持工作台26、清洗单元28、干燥单元30等的动作通过控制部94进行控制。
[0104]
控制部94例如由计算机构成,该计算机包含:以cpu(central processing unit,中央处理器)为代表的处理器(处理装置);dram(dynamic random access memory,动态随机存取存储器)、sram(static random access memory,静态随机存取存储器)、rom(read only memory,只读存储器)等主存储装置;以及闪存、硬盘驱动器、固态驱动器等辅助存储装置。
[0105]
在辅助存储装置中存储有包含规定的程序的软件。按照该软件使处理装置等进行动作,由此实现控制部94的功能。软件的一部分作为确定至少一个罐44的位置的位置确定单元94a发挥功能。
[0106]
位置确定单元94a根据从光传感器单元80接收的第1信号91和第2信号92而确定特定的一个罐44处于光传感器单元80的位置。
[0107]
例如,每当旋转台42和板部件70旋转60
°
时光传感器单元80对光学特征74进行检测,位置确定单元94a确定与所检测的各光学特征74对应的罐44的位置。
[0108]
也可以取而代之,位置确定单元94a通过用于确定一个容器的位置的一个光学特征74的检测而确定两个以上的罐44的位置,也可以确定所有的罐44的位置。
[0109]
例如位置确定单元94a在确定一个罐44处于光传感器单元80的位置之后,从辅助存储装置读出与多个罐44中的各个罐44对应的光学特征74的位置关系,由此能够确定剩余的全部的罐44的位置。
[0110]
具体而言,在如表1所示那样预先存储有光学特征74与罐44一对一地关联的信息和多个罐44的顺序的信息的情况下,若能够确定第1罐44-1处于光传感器单元80的位置,则能够确定第2罐44-2处于从第1罐44-1起沿周向72前进60
°
的位置。
[0111]
同样地,能够确定第3罐44-3处于从第1罐44-1起沿周向72前进120
°
的位置,第4罐44-4处于从第1罐44-1起沿周向72前进180
°
的位置。
[0112]
另外,能够确定第5罐44-5处于从第1罐44-1起沿周向72前进240
°
的位置,第6罐44-6处于从第1罐44-1起沿周向72前进300
°
的位置。
[0113]
在第1实施方式中,每当板部件70旋转60
°
时,利用光传感器单元80对一个光学特征74进行检测,由此能够检测出与一个光学特征74对应的罐44位于该光学特征74的上方。因此,即使在收纳单元40具有三个以上的罐44的情况下,也能够根据各光学特征74而确定罐44的位置。
[0114]
接着,对第2实施方式进行说明。图7是第2实施方式的板部件96的俯视图。在板部件96中,代替贯通区域74a而设置有容易反射激光束l的平坦的镜面状的高反射区域98a。另外,代替非贯通区域74b而设置有难以反射激光束l的低反射区域98b。
[0115]
另外,在第2实施方式中,在第1上方臂部84a的前端部的下表面侧设置有第1光传感器88a和发光二极管90a,在第2上方臂部84b的前端部的下表面侧设置有第2光传感器88b和发光二极管(未图示)。
[0116]
同样地,在第3上方臂部84c的前端部的下表面侧设置有第3光传感器88c和发光二极管(未图示)。图8的(a)是示出强度为规定值以上的光从高反射区域98a反射的情况的图。
[0117]
如图8的(a)所示,从发光二极管90a入射至高反射区域98a的激光束l在高反射区域98a发生反射(正反射或漫反射),强度为规定值以上的光入射至第1光传感器88a。由此,第1光传感器88a生成第1信号91(例如高电平电压信号)。
[0118]
与此相对,图8的(b)是示出强度不足规定值的光从低反射区域98b反射的情况的图。例如从发光二极管90a入射至低反射区域98b的激光束l在低反射区域98b被散射、吸收等。
[0119]
在该情况下,反射光完全不入射或极少入射至第1光传感器88a,因此第1光传感器88a生成第2信号92(例如低电平电压信号)。这样,在第2实施方式中,光学特征74由高反射区域98a和低反射区域98b的排列构成,这点与第1实施方式不同。
[0120]
接着,对板部件70在周向72上被n等分的多个变形例进行说明(n是2以上的自然数)。另外,在变形例中,与第1实施方式同样地采用贯通区域74a和非贯通区域74b以及光传感器单元80,但也可以如第2实施方式那样设置。
[0121]
在n等分的区域分别形成有光学特征74。在旋转台42上按照光学特征74与罐44一对一地关联的方式配置有n个罐44。
[0122]
(n=2的情况)首先,对板部件70在周向72上被二等分的情况进行说明。在该情况下,板部件70具有在周向72上被二等分而得的第1区域70a和第2区域70b。例如第1区域70a具有一个贯通区域74a,第2区域70b具有一个非贯通区域74b。
[0123]
在n=2的情况下,光传感器单元80具有第1光传感器88a和发光二极管90a。当为了便于说明而将第1信号91用“1”表示,将第2信号92用“0”表示时,第1区域70a和第2区域70b的各个区域中的光学特征74例如如下述表2那样置换成1或0。
[0124]
【表2】
[0125][0126]
位置确定单元94a根据第1信号91或第2信号92,能够确定第1罐44-1和第2罐44-2中的任意一方或双方的位置。
[0127]
(n=3的情况)当然n可以为3以上的自然数。在n=3的情况下,板部件70具有在周向72上被三等分而得的第1区域70a、第2区域70b和第3区域70c。
[0128]
例如第1区域70a具有沿着周向72依次形成的两个贯通区域74a。与此相对,第2区域70b具有沿着周向72依次形成的一个贯通区域74a和一个非贯通区域74b。另外,第3区域70c具有沿着周向72依次形成的两个非贯通区域74b。
[0129]
在n=3的情况下,光传感器单元80具有第1光传感器88a和发光二极管90a以及第2光传感器88b和与第2光传感器88b对应而配置的发光二极管。
[0130]
当为了便于说明而将第1信号91用“1”表示,将第2信号92用“0”表示时,第1区域70a、第2区域70b和第3区域70c的各个区域中的光学特征74如下述表3那样置换成1和0的排列。
[0131]
【表3】
[0132][0133]
位置确定单元94a根据第1信号91和第2信号92的排列,能够确定第1罐44-1、第2罐44-2和第3罐44-3中的一个以上的位置。
[0134]
(n=4的情况)接着,对n=4的情况进行说明。在n=4的情况下,板部件70具有在周向72上被四等分而得的第1区域70a、第2区域70b、第3区域70c和第4区域70d。
[0135]
例如第1区域70a具有沿着周向72依次形成的两个贯通区域74a,第2区域70b具有沿着周向72依次形成的一个贯通区域74a和一个非贯通区域74b。
[0136]
另外,第3区域70c具有沿着周向72依次形成的一个非贯通区域74b和一个贯通区域74a,第4区域70d具有沿着周向72依次形成的两个非贯通区域74b。
[0137]
在n=4的情况下,光传感器单元80具有第1光传感器88a和发光二极管90a以及第2光传感器88b和与第2光传感器88b对应而配置的发光二极管即可。
[0138]
当为了便于说明而将第1信号91用“1”表示,将第2信号92用“0”表示时,第1区域70a、第2区域70b、第3区域70c和第4区域70d的各个区域中的光学特征74如下述表4那样置换成1和0的排列。
[0139]
【表4】
[0140][0141]
位置确定单元94a根据第1信号91和第2信号92的排列,能够确定第1罐44-1、第2罐44-2、第3罐44-3和第4罐44-4中的一个以上的位置。
[0142]
(n=5的情况)接着,对n=5的情况进行说明。在n=5的情况下,板部件70具有在周向72上被五等分而得的第1区域70a、第2区域70b、第3区域70c、第4区域70d和第5区域70e。
[0143]
例如第1区域70a具有沿着周向72依次形成的三个贯通区域74a,第2区域70b具有沿着周向72依次形成的一个贯通区域74a和两个非贯通区域74b。第3区域70c具有沿着周向72依次形成的一个非贯通区域74b、一个贯通区域74a和一个非贯通区域74b。
[0144]
另外,第4区域70d具有沿着周向72依次形成的两个非贯通区域74b和一个贯通区域74a。第5区域70e具有沿着周向72依次形成的两个贯通区域74a和一个非贯通区域74b。
[0145]
在n=5的情况下,光传感器单元80具有第1光传感器88a和发光二极管90a、第2光传感器88b和与第2光传感器88b对应而配置的发光二极管以及第3光传感器88c和与第3光传感器88c对应而配置的发光二极管即可。
[0146]
当为了便于说明而将第1信号91用“1”表示,将第2信号92用“0”表示时,第1区域70a、第2区域70b、第3区域70c、第4区域70d和第5区域70e的各个区域中的光学特征74如下述表5那样置换成1和0的排列。
[0147]
【表5】
[0148][0149]
位置确定单元94a根据第1信号91和第2信号92的排列,能够确定第1罐44-1、第2罐44-2、第3罐44-3、第4罐44-4和第5罐44-5中的一个以上的位置。
[0150]
以上,对从n=2到n=6的情况进行了说明,也可以将n设为7以上。另外,根据板部件70在周向72上的分割数量,适当调整活塞杆50b的一个行程中的移动量、与该移动量对应的齿轮66的旋转角度、齿66a的数量等。
[0151]
例如在n=2的情况下,使旋转轴46每次旋转180
°
,在n=3的情况下,使旋转轴46每次旋转120
°
。另外,在n=4的情况下,使旋转轴46每次旋转90
°
,在n=5的情况下,使旋转轴46每次旋转72
°
。
[0152]
另外,上述的贯通区域74a和非贯通区域74b的排列以及高反射区域98a和低反射区域98b的排列为一例,可以适当变更。另外,可以代替贯通区域74a而采用设置有能够透过光的滤波器等的透过区域。除此以外,上述实施方式的结构、方法等只要不脱离本发明的目的的范围,则可以适当变更并实施。