1.本实用新型涉及玻璃磨边机技术领域,具体涉及一种高精度辅助定位机构及其磨边机。
背景技术:
2.玻璃磨边机,是一种具有粗磨、精磨、抛光一次性加工功能,且适用于磨削不同尺寸和厚度的玻璃材料的斜面、直边的加工设备。在工业生产中,玻璃磨边机常用于加工玻璃的边部,为了达到按照特定的尺寸的要求对玻璃边部进行加工,通常会在玻璃磨边机的进端设置定位机构,从而使得玻璃处于需要的位置和角度,以便于磨边装置对玻璃进行加工。
3.然而,现有技术中的玻璃磨边机存在以下技术问题:传统玻璃磨边机的定位机构包括驱动机构和定位模块,当玻璃被传输到玻璃磨边机的进端时,需停止玻璃材料的输送,等待定位机构中的驱动机构驱动定位模块将玻璃调整至需要的位置和角度后,再启动输送机构,完成下一步的玻璃磨边操作。这样的结构设计方式会导致玻璃磨边的整体加工效率低,且频繁的启停输送机构容易使定位机构出现定位错误或者失误的情况,从而最终导致玻璃材料的定位精确度低。
4.因此,现有技术中亟需发明一种结构简单且定位精确度高的磨边机。
技术实现要素:
5.针对以上所述的缺陷和不足,本实用新型提供了一种高精度辅助定位机构及其磨边机,该高精度辅助定位机构及其磨边机具有结构设计简单合理、定位精度高且加工效率高的特点。
6.一种高精度辅助定位机构,其特征在于,包括:
7.基座;
8.定位模块,所述定位模块包括转轴和定位块,所述定位块固定设置在所述转轴的端部,所述转轴可转动地设置在所述基座上;
9.气缸、夹持杆和转动杆,所述气缸固定设置在所述基座上,所述夹持杆的一端和所述气缸的活塞杆固定连接,另一端和所述转动杆的一端可转动连接,所述转动杆的另一端和所述转轴远离所述定位块的一端可转动连接;
10.其中,所述气缸用于驱动所述夹持杆升降运动,进而带动所述定位块旋转运动。
11.进一步地,还包括气缸固定座,所述气缸通过所述气缸固定座固定设置在所述基座的顶部。
12.进一步地,所述定位块的上表面设有吸盘结构。
13.进一步地,还包括支撑座,所述支撑座固定设置在所述基座上,所述转轴穿过所述支撑座设置,且所述转轴可转动地设置在所述支撑座中。
14.进一步地,所述支撑座为轴承座。
15.进一步地,所述转轴和所述支撑座之间设有若干转动缓冲机构。
16.进一步地,所述转动缓冲机构包括轴承。
17.基于同一种设计思路,本实用新型还提供了一种包括以上所述的高精度辅助定位机构的磨边机,其还包括箱体,所述高精度辅助定位机构固定设置在所述箱体的顶部。
18.进一步地,还包括磨边刀具,所述磨边刀具可转动地设置在所述箱体的顶部,且所述磨边刀具和所述高精度辅助定位机构相邻设置。
19.进一步地,还包括电控箱,所述电控箱固定设置在所述箱体的顶部。
20.本实用新型提供的高精度辅助定位机构及其磨边机相比于现有技术,至少具有以下有益效果:
21.①
、本实用新型提供的高精度辅助定位机构及其磨边机,其通过定位模块、气缸、夹持杆和转动杆的联动作用,实现定位模块上的定位块对磨边机上的精准翻边、调向以及转向等操作,从而使得玻璃处于需要的位置和角度,以便于磨边机对玻璃进行加工;
22.②
、本实用新型提供的高精度辅助定位机构及其磨边机,其中气缸通过驱动夹持杆上下往复连续运动来实现转轴的旋转运动,进而实现定位块的在位置、角度上的不间断调整操作,无需频繁启停磨边机,显著提高玻璃材料的磨边效率;
23.③
、本实用新型提供的高精度辅助定位机构及其磨边机,其通过定位模块、气缸、夹持杆和转动杆的联动作用,即可使定位块实现对玻璃材料的翻边及调向等操作,结构设计简单合理,能够满足消费者对玻璃磨边机的使用需求。
附图说明
24.图1是本实用新型的高精度辅助定位机构的侧视图;
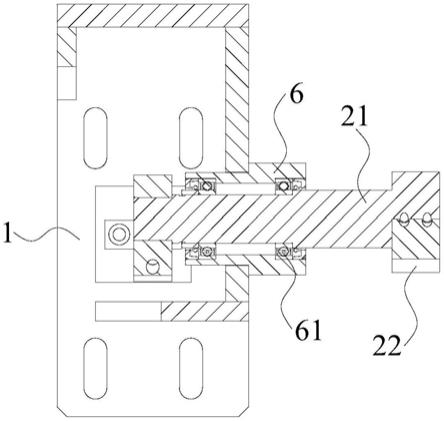
25.图2是图1所示的a-a剖面示意图;
26.图3是本实用新型的高精度辅助定位机构的结构示意图;
27.图4是本实用新型的高精度辅助定位机构的后视图;
28.图5是本实用新型的定位模块的结构示意图;
29.图6是本实用新型的磨边机的结构示意图;
30.附图标记说明:1、基座;2、定位模块;21、转轴;22、定位块;3、气缸;31、气缸固定座;4、夹持杆;5、转动杆;6、支撑座;61、转动缓冲机构;7、高精度辅助定位机构;8、箱体;9、磨边刀具;10、电控箱。
具体实施方式
31.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.参见图1-图5所示,根据本实用新型的实施例,该高精度辅助定位机构7包括基座1和定位模块2,所述定位模块2包括转轴21和定位块22,所述定位块22固定设置在所述转轴21的端部,所述转轴21可转动地设置在所述基座1上。其中,定位块22的外表面设有抵接面,当玻璃材料输送至定位模块2处时,定位块22的抵接面和玻璃外表面抵接设置,从而在转轴
的转动作用力下,实现玻璃材料的旋转、调向和翻边等操作。
33.该高精度辅助定位机构7还包括气缸3、夹持杆4和转动杆5,所述气缸3固定设置在所述基座1上,所述夹持杆4的一端和所述气缸3的活塞杆固定连接,另一端和所述转动杆5的一端可转动连接,所述转动杆5的另一端和所述转轴21远离所述定位块22的一端可转动连接。其中,启动气缸3时,气缸3上的活塞杆上下往复运动,从而带动活塞杆端部固定连接的夹持杆4升降运动。此时,由于夹持杆4的另一端和转动杆5的一端可转动连接,转动杆5的另一端和转轴 21远离所述定位块22的一端可转动连接,因此夹持杆4、转动杆5和转轴21组成摇杆机构,在气缸3的驱动作用力下,转轴21上的定位块22即可对玻璃材料的旋转、调向和翻边等操作,从而使得玻璃处于需要的位置和角度,以便于磨边机对玻璃进行加工。
34.更为具体来说,气缸3通过驱动夹持杆4上下往复连续运动来实现转轴21的旋转运动,进而实现定位块22在位置、角度上的不间断调整操作,这种结构设计方式无需频繁启停磨边机,从而显著提高玻璃材料的磨边效率。并且,通过定位模块2、气缸3、夹持杆4和转动杆5的联动作用,即可使定位块22实现对玻璃材料的翻边及调向等操作,结构设计简单合理,能够满足消费者对玻璃磨边机的使用需求。
35.参见图1-图4所示,在该实施例的可选方案中,高精度辅助定位机构7还包括气缸固定座 21,所述气缸3通过所述气缸固定座31固定设置在所述基座1的顶部。在该可选方案中,气缸固定座31由多块板状结构组成,并固定在基座1的顶侧;气缸3通过螺钉、螺栓或者螺丝等外部连接部件固定设置在气缸固定组31上,从而实现将气缸3固定装配在基座1的顶部。更为具体来说,通过将气缸3固定在基座1的顶部,可以为气缸3底部的夹持杆4提供足够的升降活动空间,从而确保转轴21转动范围足够大,满足定位块22的定位需求。
36.参见图5所示,在该实施例的另一个可选方案中,所述定位块22的上表面设有吸盘结构23。具体来说,通过在定位块22的上表面设置吸盘结构23,可以增大定位块22上表面对玻璃外表面的吸附作用力,从而确保玻璃材料能在定位块22的作用力下稳定并精准地完成旋转、调向和翻边等操作,以便于磨边机对玻璃进行后续的加工。
37.参见图3和图4所示,在本实用新型的另一个实施例中,高精度辅助定位机构7还包括支撑座6,所述支撑座6固定设置在所述基座1上,所述转轴21穿过所述支撑座6设置,且所述转轴21可转动地设置在所述支撑座6中。在该实施例的方案中,转轴21通过支撑座6可转动地装配设置在基座1上,转轴21通过相对于支撑座6的旋转运动从而实现定位块22旋转、调向和翻边的效果。更为具体来说,在转轴21相对于基座1转动的过程中,若二者直接刚性接触连接,其接触部分容易出现由于应力过于集中而导致结构磨损损坏的情况,导致转轴21或者基座1在长期使用的情况下很容易损坏,使用寿命短。因此,通过在基座1和转轴21之间设置支撑座6,可以起到支撑承载作用,从而起到分散应力的效果,避免转轴21的中部(也即和基座1装配的部位)由于应力过于集中而发生结构磨损损坏。
38.在该实施例的优选方案中,所述支撑座6为轴承座,该轴承座具有构造紧凑、承载综合负荷能力强等特点。
39.参见图4所示,在该实施例的进一步方案中,所述转轴21和所述支撑座6之间设有若干转动缓冲机构61。在该进一步方案中,通过在转轴21和支撑座6之间设置若干转动缓冲机构61,可以起到支撑转轴21旋转运动的作用,有效降低转轴21的中部位置和支撑座6之间的摩擦系数,从而提高转轴21中部位置的结构可靠性和稳定性,确保本实用新型的定位机
构使用寿命长。
40.进一步地,所述转动缓冲机构61包括轴承,通过在转轴21的中部位置和支撑座6之间设置轴承,可以为转轴21的中部旋转运动起到支撑作用,有效降低二者之间的摩擦系数,提高转轴 21和支撑座6的结构稳定性能。
41.参见图6所示,基于同一种设计思路,本实用新型还提供了一种磨边机,该磨边机包括以上实施例所述的高精度辅助定位机构7。其中,该磨边机还包括箱体8,所述高精度辅助定位机构 7固定设置在所述箱体8的顶部。具体而言,箱体8用作本实用新型的磨边机的底部支撑结构,将高精度辅助定位机构7设置在箱体8的顶部,即可在对玻璃材料进行磨边操作前,先对玻璃材料进行旋转、调向和翻边等操作,以便于磨边机对玻璃进行后续的加工。
42.参见图6所示,在该实施例的进一步方案中,该磨边机还包括磨边刀具9,所述磨边刀具9 可转动地设置在所述箱体8的顶部,且所述磨边刀具9和所述高精度辅助定位机构7相邻设置。在该进一步的方案中,将磨边刀具9设置在箱体8的顶部,且设置在高精度辅助定位机构7的相邻位置(也即高精度辅助定位机构7的后一工序位置),即可在对玻璃材料进行旋转、调向和翻边等操作后,再对玻璃材料完成磨边操作。
43.参见图6所示,在该实施例的更进一步方案中,该磨边机还包括电控箱10,所述电控箱10 固定设置在所述箱体8的顶部,通过电控箱10实现对高精度辅助定位机构7和磨边刀具9的操控,从而完成对玻璃材料的定位操作和磨边操作。
44.综上所述,本实用新型提供的高精度辅助定位机构及其磨边机,其通过定位模块2、气缸3、夹持杆4和转动杆5的联动作用,实现定位模块2上的定位块22对磨边机上的精准翻边、调向以及转向等操作,从而使得玻璃处于需要的位置和角度,以便于磨边机对玻璃进行加工。并且,本实用新型提供的高精度辅助定位机构及其磨边机,其中气缸3通过驱动夹持杆4上下往复连续运动来实现转轴21的旋转运动,进而实现定位块22的在位置、角度上的不间断调整操作,无需频繁启停磨边机,显著提高玻璃材料的磨边效率。此外,本实用新型提供的高精度辅助定位机构及其磨边机,其通过定位模块2、气缸3、夹持杆4和转动杆5的联动作用,即可使定位块22 实现对玻璃材料的翻边及调向等操作,结构设计简单合理,能够满足消费者对玻璃磨边机的使用需求。
45.当然,以上是本实用新型的优选实施方式。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型基本原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。