1.本实用新型涉及电芯制造辅助设备领域,特别涉及一种自动调节取料机械手。
背景技术:
2.在电芯的制造过程中,首先需要利用机械手将料盘上的电芯进行上料,将电芯投放到后工序中,以便后续加工,然而,由于不同款式的电芯尺寸也有所不同,因此,不同款式的电芯在料盘上摆放的位置和间距都不一样,这就导致在切换不同的电芯进行加工时,上料机械手上的取料爪也要相应地进行切换,切换过程耗费时间,导致生产效率不高,而且切换不同的取料爪时需要重新校正取料爪的原点,不然也会影响取料的精度,因此,有必要制作出一种自动调节取料机械手,能够自动调节取料间距,以适应不同尺寸的电芯进行抓取,无需进行取料爪的更换且无需重复校正原点,提高生产效率和取料精度。
技术实现要素:
3.本实用新型的目的是提供一种自动调节取料机械手以解决背景技术中所提及的问题。
4.为了实现上述目的,本实用新型提供如下技术方案:
5.一种自动调节取料机械手,包括六轴机械手和取料爪,取料爪包括安装支架、旋转电机、防护壳、螺杆、滑块、第一导杆和吸附组件,安装支架固定在六轴机械手的动力输出端,旋转电机和防护壳固定在安装支架上,螺杆可转动地安装在防护壳内,螺杆一端穿设过防护壳且固定在旋转电机的动力输出端,螺杆上依次设有第一螺纹、第二螺纹、第三螺纹和第四螺纹,第二螺纹和第三螺纹的螺距相同且螺纹方向相反,第一螺纹与第二螺纹的螺纹方向相同,第一螺纹的螺距是第二螺纹的螺距的三倍,第四螺纹与第三螺纹的螺纹方向相同,第四螺纹的螺距是第三螺纹的螺距的三倍,滑块设置四组,分别与第一螺纹、第二螺纹、第三螺纹和第四螺纹螺纹连接,第一导杆固定在防护壳上且穿设过四组滑块,四组滑块与第一导杆滑动连接,吸附组件设置四组且分别固定在四组滑块上。
6.对本实用新型的进一步描述:吸附组件包括l型架、第二导杆、第一连接块、第二连接块、第三连接块、弹簧和吸嘴部件,l型架固定在滑块上,第二导杆竖直穿设过l型架下端且与l型架滑动连接,第一连接块固定在l型架上端,第二连接块和第三连接块分别固定在第二导杆的上下两端,弹簧上端与第一连接块底部固定连接,下端与第二连接块上端固定连接,吸嘴部件固定在第三连接块下方。
7.对本实用新型的进一步描述:第一导杆设置两组,两组第一导杆分别穿设过滑块的上下两侧。
8.本实用新型的有益效果为:通过在螺杆上设置第一螺纹、第二螺纹、第三螺纹和第四螺纹,在旋转电机驱动螺杆旋转时,同时驱动四组滑块向中部靠拢或者向两侧移动,第一螺纹、第二螺纹、第三螺纹和第四螺纹通过螺纹方向和螺距,控制四组滑块在移动的过程中,相邻的两组滑块之间的距离都保持一致,因此能够适用于不同摆放间距的电芯的抓取,
无需进行取料爪的更换且无需重复校正原点,提高生产效率和取料精度。
附图说明
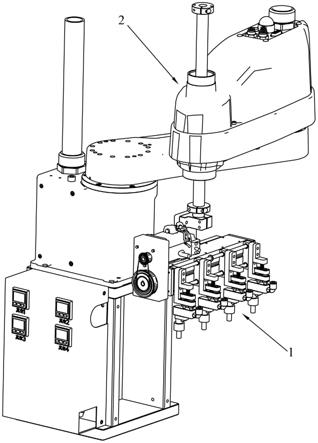
9.图1是本实用新型的整体结构图;
10.图2是本实用新型取料爪的结构图;
11.图3是本实用新型螺杆的结构示意图;
12.图4是本实用新型吸附组件的结构图;
13.附图标记说明:
14.1、取料爪;11、安装支架;12、旋转电机;13、防护壳;14、螺杆;141、第一螺纹;142、第二螺纹;143、第三螺纹;144、第四螺纹;15、滑块;16、第一导杆;17、吸附组件;171、l型架;172、第二导杆;173、第一连接块;174、第二连接块;175、第三连接块;176、弹簧;177、吸嘴部件;2、六轴机械手。
具体实施方式
15.以下结合附图对本实用新型进行进一步说明:
16.如图1至4所示,一种自动调节取料机械手,包括六轴机械手2和取料爪1,取料爪1包括安装支架11、旋转电机12、防护壳13、螺杆14、滑块15、第一导杆16和吸附组件17,安装支架11固定在六轴机械手2的动力输出端,旋转电机12和防护壳13固定在安装支架11上,螺杆14可转动地安装在防护壳13内,螺杆14一端穿设过防护壳13且固定在旋转电机12的动力输出端,螺杆14上依次设有第一螺纹141、第二螺纹142、第三螺纹143和第四螺纹144,第二螺纹142和第三螺纹143的螺距相同且螺纹方向相反,第一螺纹141与第二螺纹142的螺纹方向相同,第一螺纹141的螺距是第二螺纹142的螺距的三倍,第四螺纹144与第三螺纹143的螺纹方向相同,第四螺纹144的螺距是第三螺纹143的螺距的三倍,滑块15设置四组,分别与第一螺纹141、第二螺纹142、第三螺纹143和第四螺纹144螺纹连接,第一导杆16固定在防护壳13上且穿设过四组滑块15,四组滑块15与第一导杆16滑动连接,吸附组件17设置四组且分别固定在四组滑块15上。
17.电芯在料盘上按照一定的间距进行摆放,六轴机械手2驱动取料爪1沿x轴、y轴和z轴方向移动,对电芯进行抓取,抓取前,旋转电机12驱动螺杆14旋转,通过第一螺纹141、第二螺纹142、第三螺纹143和第四螺纹144驱动四组滑块15向中间靠拢或者向两侧移动,从而调整滑块15之间的距离,由于第一螺纹141与第二螺纹142的螺纹方向相同,第一螺纹141的螺距是第二螺纹142的螺距的三倍,第四螺纹144与第三螺纹143的螺纹方向相同,第四螺纹144的螺距是第三螺纹143的螺距的三倍,因此,相邻的滑块15之间的间距始终保持一致,能够适应不同摆放间距的电芯进行取料,滑块15移动时,沿着第一导杆16顺畅滑动,吸附组件17用于吸住电芯表面对其进行取放。
18.在本设计中,第一导杆16设置两组,两组第一导杆16分别穿设过滑块15的上下两侧,使滑块15在滑动的过程中上下两侧受力均匀,滑行更顺畅。
19.所述吸附组件17包括l型架171、第二导杆172、第一连接块173、第二连接块174、第三连接块175、弹簧176和吸嘴部件177,l型架171固定在滑块15上,第二导杆172竖直穿设过l型架171下端且与l型架171滑动连接,第一连接块173固定在l型架171上端,第二连接块
174和第三连接块175分别固定在第二导杆172的上下两端,弹簧176上端与第一连接块173底部固定连接,下端与第二连接块174上端固定连接,吸嘴部件177固定在第三连接块175下方。
20.当需要取料时,六轴机械手2驱动取料爪1移动,吸嘴部件177处于电芯的上方,当吸嘴部件177继续向下并接触电芯后,第二导杆172、第二连接块174和第三连接块175相对于第一连接块173向上运动,弹簧176被压缩,使吸嘴部件177接触电芯时起到缓冲的作用。
21.本实施例的工作原理:
22.电芯在料盘上按照一定的间距进行摆放,六轴机械手2驱动取料爪1沿x轴、y轴和z轴方向移动,对电芯进行抓取,抓取前,旋转电机12驱动螺杆14旋转,通过第一螺纹141、第二螺纹142、第三螺纹143和第四螺纹144驱动四组滑块15向中间靠拢或者向两侧移动,从而调整滑块15之间的距离,相邻的滑块15之间的间距始终保持一致,能够适应不同摆放间距的电芯进行取料,滑块15移动时,沿着第一导杆16顺畅滑动,吸附组件17用于吸住电芯表面对其进行取放。
23.以上并非对本实用新型的技术范围作任何限制,凡依据本实用新型技术实质对以上的实施例所作的任何修改、等同变化与修饰,均仍属于本实用新型的技术方案的范围内。