1.本实用新型涉及汽车安全带卷收器组装技术领域,尤其是涉及一种汽车安全带锁止棘轮的自动组装设备。
背景技术:
2.安全带是汽车最主要的被动安全措施之一,鉴于其显著的保护效果,目前全世界已有29个国家和地区制定了安全带的装备和使用法规。对卷收器的功能要求是,不使用安全带时将织带收卷起来加以保护,在使用时,佩戴者作一般活动时卷收器不得妨碍织带的自由伸缩,当车体或乘员承受过大加速度或车体倾斜超过一定程度时,锁止织带将乘员约束在座椅上。因此,确保安全带的锁紧能力以及锁止的可靠性,对于安全带的安全性能具有极其重要的作用。
3.目前,锁止棘轮的装配通常还是采用手工装配的方式,存在生产效率低下,工人劳动强度高的问题,而且容易出现装配不良品,质量也无法保证。
技术实现要素:
4.有鉴于此,本实用新型的目的在于提供一种汽车安全带锁止棘轮的自动组装设备,以提升棘轮组装质量和组装效率。
5.为实现上述目的,本实用新型采用以下内容:
6.一种汽车安全带锁止棘轮的自动组装设备,包括:
7.机架;
8.棘轮给料仓,用于循环输送棘轮;
9.机械罩盖给料仓,用于循环输送机械罩盖;
10.六轴机器人,可用于分别提取棘轮给料仓中的棘轮、机械罩盖给料仓中的机械罩盖;
11.相机检测组件,用于检测六轴机器人所提取的棘轮是否缺失配件,以及检测机械罩盖是否缺损;
12.相机矫正组件,用于视觉矫正棘轮和机械罩盖的安装位置;
13.铆压组件,用于将机械罩盖压入待组装卷收器上;
14.所述六轴机器人、相机检测组件、相机矫正组件和铆压组件依次设置在机架的上端面,所述棘轮给料仓和机械罩盖给料仓设于机架的外侧部。
15.作为优选的,所述六轴机器人包括:
16.作业头,可翻转地设于六轴机器人的输出端;
17.真空吸盘头,用于吸取机械罩盖给料仓中的机械罩盖;
18.取料机械爪一,用于夹取待组装卷收器;
19.取料机械爪二,用于夹取棘轮给料仓中的棘轮;
20.所述真空吸盘头、取料机械爪一、取料机械爪二分别布置于作业头的侧部。
21.作为优选的,所述相机检测组件包括支架一,支架一上设有一镜头朝上的相机一。
22.作为优选的,所述机架上还设有不良品盒,当相机检测组件检测出棘轮存在配件缺失和或机械罩盖存在缺损时,不良品将投放至不良品盒内。
23.作为优选的,所述相机矫正组件包括支架二,支架二上设有一镜头朝下的相机二。
24.作为优选的,所述铆压组件包括:
25.底架;
26.工作板,滑动安装于底架的上端面,工作板上具有产品槽位,在工作板相对底架左右移动的过程中,工作板会经过所述相机二的下方;
27.侧撑架,设于底架的上端一侧,其上设有一在提升气缸的驱动下能实现垂直升降的铆压模组,以及一在位移气缸的作用下能实现上下移动的探针检测模组。
28.作为优选的,所述相机二、工作板、铆压模组、探针检测模组的中心线处于同一条中心对称线上。
29.作为优选的,所述工作板通过一设于底架下部的丝杆螺母组件与底架建立滑动连接,并且工作板与底架上端面之间还布置有滑轨滑块组件。
30.作为优选的,所述棘轮给料仓和机械罩盖给料仓并行设于机架的两侧或同侧。
31.相对于现有技术的有益效果是,采用上述方案,本实用新型实现了棘轮和机械罩盖的自动化组装,减轻了繁重的体力劳动;同时组装前还能够对棘轮和机械罩盖的质量进行检测,以剔除不良品,组装完成后还可对安装质量进行检测,以确保组装成功,做到了精度高、产品合格率高,大大降低了生产成本,提高了生产效率。
附图说明
32.下面结合附图对本实用新型的具体实施方式作进一步详细的说明。
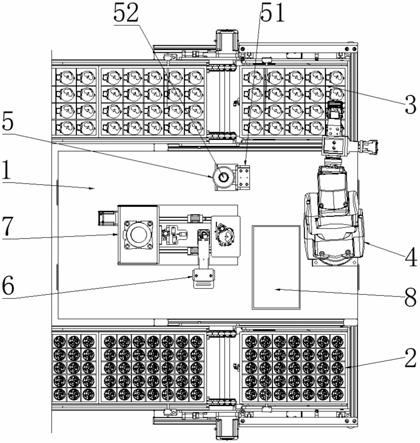
33.图1是本实用新型实施例一种汽车安全带锁止棘轮的自动组装设备的结构示意图;
34.图2是本实用新型实施例中六轴机器人的相关结构示意图;
35.图3是本实用新型实施例中相机矫正组件及铆压组件的相关结构示意图;
36.图中,各附图标记为:
37.1-机架,2-棘轮给料仓,3-机械罩盖给料仓,4-六轴机器人,5-相机检测组件,6-相机矫正组件,7-铆压组件,8-不良品盒,41-作业头,42-真空吸盘头,43-取料机械爪一,44-取料机械爪二,51-支架一,52-相机一,61-支架二,62-相机二,71-底架,72-工作板,73-侧撑架,74-铆压模组,75-提升气缸,76-探针检测模组,77-位移气缸,78-丝杆螺母组件,79-滑轨滑块组件,721-产品槽位。
具体实施方式
38.为了更清楚地说明本实用新型,下面结合优选实施例对本实用新型做进一步的说明。本领域技术人员应当理解,下面所具体描述的内容是说明性的而非限制性的,不应以此限制本实用新型的保护范围。
39.如图1所示,本实用新型实施例提供一种汽车安全带锁止棘轮的自动组装设备,包括:
40.机架1,逻辑上,机架的上方可以设玻璃罩壳,以使组装工作是在一封闭的空间内进行,可避免外界因素的干扰;
41.棘轮给料仓2,用于循环输送棘轮,棘轮给料仓可通过一双层循环倍速链进行输送,可随时补料,无需停机等待;
42.机械罩盖给料仓3,用于循环输送机械罩盖,与棘轮给料仓相同,也可由一双层循环倍速链进行输送;
43.六轴机器人4,可用于分别提取棘轮给料仓中的棘轮、机械罩盖给料仓中的机械罩盖,通过外部计算机控制六轴机器人工作,自动化程度高;
44.相机检测组件5,用于检测六轴机器人所提取的棘轮是否缺失配件,以及检测机械罩盖是否缺损;
45.相机矫正组件6,用于视觉矫正棘轮和机械罩盖的安装位置;
46.铆压组件7,用于将机械罩盖压入待组装卷收器上;
47.其中,六轴机器人4、相机检测组件5、相机矫正组件6和铆压组件7依次设置在机架1的上端面,棘轮给料仓2和机械罩盖给料仓3设于机架1的外侧部。
48.在本实施例中,如图2所示,六轴机器人4包括:
49.作业头41,可翻转地设于六轴机器人4的输出端;
50.真空吸盘头42,用于吸取机械罩盖给料仓中的机械罩盖;
51.取料机械爪一43,用于夹取待组装卷收器,可选用气动夹爪;
52.取料机械爪二44,用于夹取棘轮给料仓中的棘轮,可选用气动夹爪;
53.其中,真空吸盘头42、取料机械爪一43、取料机械爪二43分别布置于作业头41的侧部。
54.六轴机器人在运行时可以带动作业头进行全角度旋转,从而使得作业头上的真空吸盘头移动至机械罩盖给料仓中的其中一个机械罩盖的正上方、使得作业头上的取料机械爪一移动至其他工位上的待组装卷收器的正上方、以及使得作业头上的取料机械爪二移动至棘轮给料仓中的其中一个棘轮的正上方。
55.在本实施例中,结合图1所示,相机检测组件5包括支架一51,支架一51上设有一镜头朝上的相机一52。
56.相机检测组件的具体检测方式如下:六轴机器人作业头上的取料机械爪二移动至棘轮给料仓中的其中一个棘轮的正上方,并对该棘轮进行夹取,之后取料机械爪二带着该棘轮移动至相机一的上方,相机一对该棘轮进行视觉检测,判断此棘轮上是否存在配件缺失;以及,六轴机器人作业头上的真空吸盘头移动至机械罩盖给料仓中的其中一个机械罩盖的正上方,并对该机械罩盖进行吸取,之后真空吸盘头带着该机械罩盖移动至相机一的上方,相机一对该机械罩盖进行视觉检测,判断此机械罩盖是否存在缺损。
57.进一步的,结合图1所示,机架1上还设有不良品盒8,当相机检测组件检测出棘轮存在配件缺失和或机械罩盖存在缺损时,此不良品将被六轴机器人投放至不良品盒内。
58.在本实施例中,参见图3所示,相机矫正组件6包括支架二61,支架二61上设有一镜头朝下的相机二62。
59.此外,铆压组件7包括:
60.底架71;
61.工作板72,滑动安装于底架71的上端面,工作板72上具有产品槽位721,在工作板72相对底架71左右移动的过程中,工作板72会经过相机二62的下方;
62.侧撑架73,设于底架71的上端一侧,其上设有一在提升气缸75的驱动下能实现垂直升降的铆压模组74,以及一在位移气缸77的作用下能实现上下移动的探针检测模组76。
63.铆压组件及相机矫正组件的工作方式如下:首先,六轴机器人作业头上的取料机械爪一移动至其他工位上的待组装卷收器的正上方,并夹取其中一个待组装卷收器,之后将该待组装卷收器放置于工作板上的产品槽位中;然后,六轴机器人作业头上的取料机械爪二从棘轮给料仓中夹取一个棘轮,通过相机检测组件的视觉检测后,该合格棘轮被安放于待组装卷收器上,这时,控制工作板移动至相机二的下方,相机二对棘轮的安装位置进行视觉检测,若与预设位置存在偏差,则控制六轴机器人对棘轮进行旋转调整,并视觉检测棘轮是否回弹至原位;接着,六轴机器人作业头上的真空吸盘头从机械罩盖给料仓中吸取一个机械罩盖,通过相机检测组件的视觉检测后,该合格机械罩盖被安放于棘轮上,这时,控制工作板移动至铆压模组的正下方,铆压模组向下移动并将铆接件铆压进机械罩盖上的铆接点内,完成机械罩盖的安装,随后,控制工作板移动至探针检测模组的正下方,探针检测模组向下移动以对机械罩盖上的铆接处进行检测,判断是否铆压成功;最后,完成铆压的产品再随工作板移动至相机矫正组件的下方,对机械罩盖的外观及尺寸进行检测。
64.值得注意的是,相机二62、工作板72、铆压模组74、探针检测模组76的中心线处于同一条中心对称线上。降低了工作板移动过程中其上安放产品偏移的风险。
65.另外,详见图3所示,工作板72通过一设于底架71下部的丝杆螺母组件78与底架71建立滑动连接,并且工作板72与底架71上端面之间还布置有滑轨滑块组件79。控制工作板相对底架左右移动的机构结构简单、定位精度高。
66.此外,棘轮给料仓2和机械罩盖给料仓3并行设于机架1的两侧或同侧。保证六轴机器人作业头上的真空吸盘头、取料机械爪二能提取到相应的零件即可。
67.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本实用新型的技术方案所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围之列。