1.本发明属于光伏板清理领域,尤其是一种光伏发电站的清扫系统及其清扫方法。
背景技术:
2.光伏板一般处在室外持续暴晒在自然环境中,光伏板会吸附空气中的尘埃颗粒,另外鸟粪以及尘土、落叶、黄沙等因素,也会影响了光伏发电组件接收阳光的效率。尤其大规模光伏电站一般都建立在沙漠盐碱地等偏僻地区,这些光伏电站所处的环境较为恶劣,沙尘污染比较严重,影响光伏电站的经济效益。
3.鉴于上述情况,需要通过经常对光伏板进行清扫或清洗。现有技术中存在多种不同形式的光伏板用清扫机器人。例如链轮机器人,其包括设置在机壳两侧、用于控制前进路线的驱动轮,以及设置在所述外壳外侧、与驱动轮相垂直、且与光伏板的外框架的侧面相抵的限位轮。在电机驱动下两侧的驱动轮沿着光伏板的外边框行走,是实现对光伏发电站的清扫。
4.但是由于光伏板一般都是呈阵列分布,彼此之间会存在一定的距离,导致需要频繁的移动链轮机器人,已达到清扫机器人在不同光伏板之间的移动和清理。这样大大降低了光伏板的清理效率。
技术实现要素:
5.为了克服上述技术缺陷,本发明提供一种光伏发电站的清扫系统及其清扫方法,以解决背景技术所涉及的问题。
6.本发明提供一种光伏发电站的清扫系统及其清扫方法,包括:
7.桥接装置,包括与分别卡设在相邻两个安装框上的可拆卸式拼接件,以及通过可拆卸方式分别固定安装在所述可拆卸式拼接件上的连接件;通过所述桥接装置将同一排的安装框连接在一起;其中,所述安装框用于安装光伏板;
8.摆渡装置,包括铺设于并列的光伏板阵列的外侧的轨道,沿着所述轨道沿着纵向滑动的摆渡车;
9.清扫机器人,包括架设在所述光伏板安装框上、并沿着所述安装框的横向运动的链轮机器人,以及安装在所述链轮机器人的下方、适于清扫光伏板的清扫单元。
10.优选地或可选地,所述安装框包括:沿着所述光伏板设置的周边,设置在所述周边上部、用于安装光伏板的上表面,以及设置在所述周边下部、沿着所述周边向光伏板侧弯折的弯折部;
11.可拆卸式拼接件,分别安装在一对邻近安装框上;所述可拆卸式拼接件包括卡设在所述弯折部上的第一拼接部分,沿着所述上表面、周边的外轮廓设置的第二拼接部分,以及用于连接所述第一拼接部分和所述第二拼接部分的螺钉;
12.连接件,为截面形状为形的角钢,其两端通过可拆卸方式分别固定安装在可拆卸式拼接件上。
13.优选地或可选地,所述第一拼接部分包括:配合部、过渡部、第一安装部、第一安装孔;其中,所述配合部和过渡部沿着所述弯折部轮廓设置,形成“u”形槽,使得所述弯折部可以插接于所述“u”形槽内;所述安装部沿着过渡部向下弯折,并垂直于所述配合部,所述第一安装孔设在所述安装部上。
14.优选地或可选地,所述第二拼接部分包括:沿着所述上表面、周边的外轮廓设置的本体部,沿着所述本体部向远离光伏板的一侧延伸的桥接部,沿着所述本体部向下延伸的第二安装部;设在所述第二安装部上、与所述第一安装孔相对齐的第二安装孔,以及设在所述桥接部上的多个第三安装孔。
15.优选地或可选地,所述在所述角钢上均匀分布有多个腰形孔,通过螺钉与所述第三安装孔相固定。
16.优选地或可选地,所述摆渡车包括:
17.转运机构,包括机架,设在所述机架底部、并卡设在所述导轨上的至少两组行走机构;所述行走轮机构至少有一组为减速电机驱动的主动轮;
18.桥接机构,倾斜设置在所述机架与光伏阵列板之间,以供清扫机器人爬行在所述摆渡车上;
19.锁止机构,包括固定在所述轨道上的定位感应片,设在所述机架底部、与所述定位传感器相配合的定位传感器,以及设置在所述轨道上、与光伏板相对应的多个限位凹槽。
20.优选地或可选地,所述清扫机器人包括:
21.框架,架设在倾斜预定角度的所述安装框上;
22.第一驱动组件,设置在所述框架上较高的一侧,其包括与所述安装框上表面相贴合的第一输出轮,与所述安装框侧面相贴合的第二输出轮;
23.第二驱动组件,设置在所述框架上较低的一侧,其包括与所述安装框上表面相贴合的第三输出轮;
24.姿态检测组件,设在所述第二驱动组件的一侧,与所述安装框侧面相贴合,适于获得所述清扫机器人的位姿。
25.优选地或可选地,所述第一驱动组件还包括:
26.第一安装架,固定安装在所述框架的一侧;
27.第一驱动源,包括设置在所述第一安装架上第一电机,与所述第一电机相连接的第一主动齿轮;
28.第一输出端,包括与所述第一主动齿轮传动连接的第一从动齿轮,水平安装在所述第一安装架上、一端与所述第一从动齿轮同轴连接、另一端与所述第一输出轮相连接的第一转动轴,以及设置在所述第一转动轴中部的第一斜齿轮;
29.第二输出端,包括垂直安装在所述第一安装架上、且一端与所述第二输出轮相连接的第二转动轴,以及设置在所述第二转动轴中部、与所述第一斜齿轮垂直啮合的第二斜齿轮。
30.优选地或可选地,所述姿态检测机构,包括:安装在所述第二安装架底部的固定板,设置在所述固定板一侧的转轴,固定安装在所述固定板另一侧的拉簧立柱,铰接在所述转轴上的两个支杆,分别转动安装在所述支杆的两个导轮,分别固定安装在所述支杆上的两个挡板,用于连接所述挡板和拉簧立柱的两个拉簧,以及分别设在所述挡板后方发两个
位置传感器,其中,所述导轮在拉簧作用下始终与安装框相抵,通过所述位置传感器检测所述挡板的位置变化,进而获得所述清扫机器人的位姿。
31.另一方面,本发明还提供一种基于上述的光伏发电站的清扫系统的清扫方法,包括如下步骤:
32.将可拆卸式拼接件安装在相邻的两个安装框上,然后将连接件安装在所述可拆卸式拼接件;重复上述步骤,将同一排的安装框连接在一起;
33.清扫机器人沿着同一排的安装框运动,实现对光伏板的清理;
34.当所述运动至同一排的安装框的最外侧时,摆渡车沿着轨道运动至于同一排的安装框相对齐;
35.清扫机器人继续运动,至摆渡车上;然后所述摆渡车继续沿着轨道继续前行,运动至下一排的安装框上;
36.清扫机器人继续运动,返回至下一排的安装框上,对下一排实现对光伏板的清理。
37.本发明涉及一种光伏发电站的清扫系统及其清扫方法,相较于现有技术,具有如下有益效果:
38.1、通过桥接装置将同一排的安装框连接在一起,方便清扫机器人对一行光伏板进行清理;然后通过摆渡车将清扫机器人转运至下一排安装框中,对下一排光伏进行清理。如此,实现对整个光伏板阵列的清理;不仅减少了人工的参与度,而且可以大大的提高光伏板的清理效率。
39.2、根据安装框其本身的特点,设计第一拼接部分和第二拼接部分形状,使其组合后的拼接部的内轮廓与所述安装框外部轮廓相适应,卡设在所述安装框上,然后通过连接件架设到可拆卸式拼接件上,实现两个安装框之间的连接。由于不需要在安装框上打孔便能连接,不仅方便拆装,而且不会对安装框的结构稳定性造成损伤,形成潜在风险。
40.3、在第一驱动组件一侧,通过单一驱动源分别带动两个相互垂直的输出轮同频运动,由于两个输出端分别位于光伏板的安装框的两个面上,至少有一个输出轮与安装框有足够的摩擦力,用于维持第一驱动组件的正常行驶;
41.4、通过调节齿轮调整链条的张力,保证避免链条与齿轮之间发生相对滑动,进而保证输出轮运动的一致性。
42.5、通过两个配对斜齿轮组成的交错轴间的齿轮传动,实施传动方向的改变,同时保证所述第二转动轴与所述第一转动轴保持相同的运动周期。
43.6、通过设置有防滑条纹,可以提高输出滚轮与拐角面之间的摩擦力,提高驱动单元运动的稳定性。
44.7、在第二驱动组件一侧,通过第三输出轮保持向前的驱动力,同时,所述导轮在拉簧作用下始终与安装框相抵,避免链式机器人发生偏移;进而实现链式机器人在倾斜的安装框架上的正常行驶。
45.8、所述姿态检测组件位于第二驱动组件的一侧,当所述清扫机器人通过所述姿态检测组件通过桥接装置时,不会出现悬空或安装因素的影响,导致姿态检测组件检测数据失真,形成纠偏误差。
46.9、通过合理设计所述挡板与所述位置传感器的中垂线的夹角,当清扫机器人出现偏斜时,其中一个挡板与所对应的位置传感器垂直时,则该位置传感器接收到距离信息,即
认为清扫机器人偏斜达到阈值,控制板可进一步调整第一驱动组件和第二驱动组件的输出效率,实现纠偏。
47.10、摆渡车与轨道之间设置有锁止结构,在摆渡车停稳后,对摆渡车进行固定,避免在清扫机器人在移动时,摆渡车发生滑动,提高摆渡车的转移稳定性。
附图说明
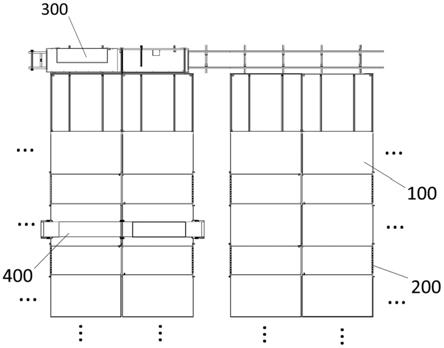
48.图1是本发明的结构示意图。
49.图2为本发明中桥接装置的结构示意图。
50.图3为本发明中安装框的结构示意图。
51.图4为本发明中第一拼接部分的结构示意图。
52.图5为本发明中第二拼接部分的结构示意图。
53.图6为本发明中连接件的结构示意图。
54.图7为本发明中轨道和桥接机构的结构示意图。
55.图8为本发明中桥接件的局部放大图。
56.图9是本发明中转运机构的结构示意图。
57.图10是本发明中清扫机器人的结构示意图。
58.图11是本发明中第一驱动组件的结构示意图。
59.图12是本发明中第一驱动源的结构示意图。
60.图13是本发明中第一斜齿轮和第二斜齿轮传动的结构示意图。
61.图14是本发明中第二驱动组件的结构示意图。
62.图15是本发明中姿态检测组件的结构图。
63.附图标记为:安装框100、周边110、上表面120、弯折部130;
64.桥接装置200、可拆卸式拼接件210、第一拼接部分211、第二拼接部分212、螺钉 213、配合部211a、过渡部211b、第一安装部211c、第一安装孔211d、本体部212a、桥接部212b、第二安装部212c、第二安装孔212d、第三安装孔212e、定位部212f、连接件220、角钢221、腰形孔222;
65.摆渡装置300、轨道310、拼接件322、三角支撑架323、连接件324、支撑部325、机架331、减速电机332、主动轮333、限位轮334、定位感应片341、定位传感器342、限位凹槽343;
66.清扫机器人400、框架410、电箱411、第一驱动组件420、第一安装架421、第一主动齿轮422、第一从动齿轮423、第一转动轴424、第一输出轮425、第一斜齿轮426、第二转动轴427、第二输出轮428、第二斜齿轮429、调节齿轮430、第二驱动组件440、第二安装架441、第二电机442、第二主动齿轮443、第二从动齿轮444、第三转动轴445、第三输出轮446、姿态检测组件450、固定板451、转轴452、拉簧立柱453、支杆454、导轮455、挡板456、拉簧457、位置传感器458、清扫组件460、中间导轮470。
具体实施方式
67.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进
行描述。
68.发明概述
69.参阅附图1,一种光伏发电站的清扫系统,包括:桥接装置200,摆渡装置300和清扫机器人400三部分。
70.桥接装置200包括与分别卡设在相邻两个安装框100上的可拆卸式拼接件210,以及通过可拆卸方式分别固定安装在所述可拆卸式拼接件210上的连接件220;通过所述桥接装置200将同一排的安装框100连接在一起;其中,所述安装框100用于安装光伏板。摆渡装置300包括铺设于并列的光伏板阵列的外侧的轨道310,沿着所述轨道310 沿着纵向滑动的摆渡车320。清扫机器人400包括架设在所述光伏板安装框100上、并沿着所述安装框100的横向运动的链轮机器人,以及安装在所述链轮机器人的下方、适于清扫光伏板的清扫单元。
71.为了方便理解光伏发电站的清扫系统的技术方案,对其工作原理做出简要说明:是运行该系统是,将可拆卸式拼接件210安装在相邻的两个安装框100上,然后将连接件 220安装在所述可拆卸式拼接件210;重复上述步骤,将同一排的安装框100连接在一起;清扫机器人400沿着同一排的安装框100运动,实现对光伏板的清理;当所述运动至同一排的安装框100的最外侧时,摆渡车320沿着轨道310运动至于同一排的安装框 100相对齐;清扫机器人400继续运动,至摆渡车320上;然后所述摆渡车320继续沿着轨道310继续前行,运动至下一排的安装框100上;清扫机器人400继续运动,返回至下一排的安装框100上,对下一排实现对光伏板的清理。
72.下面结合具体示例,对本发明作进一步说明,所述的实施例的示例旨在解释本发明,而不能理解为对本发明的限制。
73.桥接装置200优选示例
74.参阅附图2,本实施例的桥接装置200,包括安装框100、第一拼接部分211、第二拼接部分212、连接件220。
75.参阅附图3,安装框100包括沿着所述光伏板设置的周边110,在所述周边110上部设有上表面120,周边110的底部设有弯折部130,配合部211a卡设在弯折部130上;所述上表面120、周边110以及弯折部130的截面为“匚”形。在一对邻近安装框100分别安装有一对相互配合的可拆卸式拼接件210。所述可拆卸式拼接件210包括卡设在所述弯折部130上的第一拼接部分211,沿着所述上表面120、周边110的外轮廓设置的第二拼接部分212,以及用于连接所述第一拼接部分211和所述第二拼接部分212的螺钉213;连接件220为截面形状为形的角钢221,其两端通过可拆卸方式分别固定安装在可拆卸式拼接件210上。角钢221通过与第二拼接部分212连接固定两边的安装框100,不需要在安装框100上打孔便能连接,安装方便且不会对太阳能板造成潜在风险。
76.在进一步实施例中,参阅附图4,第一拼接部分211卡设在弯折部130上,第一拼接部分211包括配合部211a、过渡部211b、第一安装部211c和第一安装孔211d,两个第一安装孔211d设置在第一安装部211c上,用于铆钉的安装,配合部211a与第一安装部211c垂直,所述配合部211a和过渡部211b沿着所述弯折部轮廓设置,形成u形槽, u形槽内壁的距离等于弯折部1的槽边的厚度,使得第一拼接部分211刚好卡在弯折部 130上,避免第一拼接部分211晃动且安装方便。
77.在进一步实施例中,参阅附图5,第二拼接部分212包括:本体部212a、桥接部212b、
第三安装孔212e、第二安装部212c、第二安装孔212d和定位部212f。本体部212a与桥接部212b垂直,形成直角,定位部212f与第二安装部212c垂直,本体部212a的一侧设有五个第三安装孔212e,本体部212a的另一侧边角设有缺口,缺口与上表面120 的形状配合,便于安装时本体部212a位置的确定。第二安装部212c的一侧设有两个第二安装孔212d,第二安装孔212d与第一安装孔211d配合,方便第二拼接部分212和第一拼接部分211快速确定配合位置,第二安装部212c与桥接部212b连接部分为斜面,适于挡住安装框100的拐角,避免划伤人员,提高安全性。定位部212f的顶端与本体部212a的底部之间的距离等于周边110的高度,限制第二拼接部分212的上下移动,提高稳定性。
78.在进一步实施例中,参阅附图6,角钢221的一边上设有多个腰形孔222,腰形孔 222与第三安装孔212e配合,用于定位与固定。角钢221的内直角与第二拼接部分212 中的本体部212a、第二安装部212c形成的直角配合,腰形孔222给铆钉提供可调节的安装空间,安装角钢221时能够调整位置,便于安装。
79.在具体实施过程中,本实施例中的安装框100底部设有弯折部130,将弯折部130 插入配合部211a的u型槽中,配合部211a的u型槽的内壁距离等于弯折部130的槽边的厚度,使得第一拼接部分211刚好卡在弯折部130上;然后将第二拼接部分212放置在安装框100的外部,通过第二安装孔212d与第一安装孔211d确定第一拼接部分211 和第二拼接部分212的配合位置,用铆钉穿过第二安装孔212d与第一安装孔211d进行固定;然后将角钢221放置在桥接部212b上,用铆钉穿过腰形孔222与第三安装孔212e 实现第二拼接部分212和角钢221的连接,使得相邻的两个安装框100连接成整体。由于不需要在安装框100上打孔便能连接,安装方便且不会对安装框100的结构稳定性造成损伤,造成潜在风险。
80.摆渡装置300优选示例
81.参阅附图7,摆渡装置300包括:铺设于并列的光伏板阵列的外侧的轨道310,沿着所述轨道310滑动的摆渡车。
82.其中,所述摆渡车包括:转运机构、桥接机构和锁止机构。
83.桥接机构倾斜设置在所述机架331与光伏阵列板之间,并且每一列光伏板阵列均需要安装所述桥接机构,以供清扫机器人爬行在所述摆渡车上。所述桥接装置包括:安装框、拼接件322、三角支撑架323和连接件324。其中所述安装框用于安装光伏板,在所述安装框的一侧设置有多个拼接件322,所述拼接件322均匀分布并固定在所述安装框的一侧。参阅附图8,所述拼接件322的结构与前文中的可拆卸式拼接件322结构相似,不再赘述,不同点在于:所述拼接件322向外凸出形成一个支撑部325;三角支撑架323包括沿着所述机架331向外延伸的多个支撑导轨,垂直于所述支撑导轨安装的多个立柱,以及设在所述立柱上的横梁;连接件324一端通过可拆卸方式分别固定安装在所述安装框上,另一端安装在所述横梁上。其中,所述横梁与摆渡车的高度相适应,以满足摆渡车的正常运行。需要说明的是,由于同一光伏发电站内的光伏板的倾斜角度一般是相同的,因此只需要工厂订制的相同倾角的三角支撑架323即可满足发电站的应用。
84.参阅附图9,转运机构包括机架331,设在所述机架331底部、并卡设在所述导轨上的至少两组行走机构;所述行走轮机构至少有一组为减速电机332驱动的主动轮333。所述行走机构包括:驱动组件、主动轮333和限位轮334。其中,驱动组件为安装在所述机架331底部的减速电机332;主动轮333设置在所述机架331两侧,并卡设在所述轨道310的上表面;所
述主动轮333与所述减速电机332通过链条传动连接;限位轮334 设置在所述轨道310两侧,贴合与所述轨道310侧面运动。其中需要说明的是,本发明采用减速电机332作为动力源,减速电机332传动比分级精细,能够提供摆渡车的运动精准性和足够的动力,而且尤其在刹车过程中能够保证行走轮刚好与锁止机构配合,防止摆渡车相对于轨道310之间发生滑移。
85.锁止机构包括固定在所述轨道310上的定位感应片341,设在所述机架331底部、与所述定位传感器342相配合的定位传感器342,以及设置在所述轨道310上的、与光伏板相对应的多个限位凹槽343。其中,所述限位凹槽343有两个减速板形成的凹型区域,将主动轮333卡设在所述凹型区域内。通过定位传感器342获取定位感应片341的反馈信号,确定摆渡车的位置,及时刹车,保证主动轮333刚好落入限位凹槽343中,实现摆渡车的锁止。同时由于所述动力源为减速电机332,能够为主动轮333提供足够动力以越过所述限位凹槽343。
86.在具体实施过程中,当所述摆渡车运动清洗完一列光伏板后,通过桥接组件运动至摆渡车上的机架331上,然后所述摆渡车沿着轨道310前行,当运动至下一列光伏板时,通过定位传感器342获取定位感应片341的反馈信号,确定摆渡车的位置,控制板控制减速电机332及时刹车,保证主动轮333刚好落入限位凹槽343中,实现摆渡车的锁止。然后清扫机器人沿着桥接组件运动至下一列光伏板上,对下一列光伏板进行清理,重复上述操作,实现对光伏板阵列进行清扫。然后摆渡车携带清扫机器人运动至导轨的一侧,通过定位传感器342获取极限位置感应片的反馈信号,确定摆渡车的位置,实现摆渡车和清扫机器人停车。
87.清扫机器人400优选示例
88.另外,现有的电站式光伏板,为了提高发电效率,一般会在保证太阳光照射角度的前提下,提高光伏板的倾斜度,以提高光伏板的密度。但是如此会对导致驱动轮与光伏板之间的摩擦力降低,导致传统的链轮机器人无法在电站式光伏板上行走。
89.参阅附图10,所述清扫机器人400包括:框架410、第一驱动组件420、第二驱动组件440和姿态检测组件450。
90.其中,所述框架410作为链轮机器人的主体部分,架设在倾斜预定角度的光伏板的安装框100上。
91.参阅附图11至14,第一驱动组件420设置在所述框架410上较高的一侧,其包括第一安装架421、第一驱动源、第一输出端和第二输出端。其中,第一安装架421固定安装在所述框架410的较高一侧,所述安装架由多个安装板组成的立方形框架410,用于安装第一输出端和第二输出端,保证所述第一输出端和第二输出端相互垂直。另外,在所述第一安装架421的外部设置有外壳,起到防尘防水的效果。所述第一驱动源包括设置在所述安装架上第一电机,与所述第一电机的输出轴相连接的第一主动齿轮422。所述第一电电机为直流无刷电机。所述主动齿轮位于安装板的外侧。所述第一输出端设置有两组,分别位于所述驱动源的两侧。具体地,第一输出端包括:与所述第一主动齿轮422传动连接的第一从动齿轮423,水平安装在所述第一安装架421上、一端与所述第一从动齿轮423同轴连接的第一转动轴424,设置在所述第一转动轴424中部的第一斜齿轮426,以及设置在所述第一转动轴424的另一端的第一输出轮425。其中,所述第一转动轴424水平穿两个相对设置的安装板,第一从动齿轮423位于其中一个安装板的外侧,并与第一主动齿轮422位于同一平面上第一主动齿轮422与所述第一从动轮之间通过链条相连接,形成一个等腰三角形,通过链条传动,保证了第一从动轮的运动的一致性,进而保证第一输出轮425和第二输出轮428的运动一致;第
一输出轮425位于所述另一安装板上的外侧。所述第二输出端设置有两组,分别位于所述第一输出端的一侧。具体地,所述第二输出端包括:垂直安装在所述安装架上的第二转动轴427,设置在所述第二转动轴427中部、与所述第一斜齿轮426垂直啮合的第二斜齿轮429,以及设置在所述第二转动轴427底部的第二输出轮428。其中,所述第一斜齿轮426、所述第二斜齿轮429位于所述安装架内部,且两者的轴线相互垂直,法面模数和法面压力角相等。通过两个配对斜齿轮组成的交错轴间的齿轮传动,实施传动方向的改变,同时保证所述第二转动轴427与所述第一转动轴424保持相同的运动周期。
92.在进一步实施例中,所述主动齿轮和从动齿轮之间设置至少一个有调节齿轮430,适于调整所述链条的张力。具体地,在所述安装架上设置有一个滑动槽,所述调节齿轮 430的安装轴穿过所述滑动槽,可以沿着所述滑动槽左右滑动。由于所述驱动单元一般在拐角面的行驶,因此,需要保证第一输出端与第二输出端之间运动周期的一致性,否则很容易发生偏移,进而导致链式机器人与光伏板卡死。通过调节齿轮430保证所述链条的张力大小,避免链条与齿轮之间发生相对滑动。
93.第二驱动组件440设置在所述框架410上较低的一侧,其包括:第二安装架441、第二驱动源、第二电机442、第二主动齿轮443、第三输出端和姿态检测组件450。其中,所述第二安装架441固定安装在所述框架410的另一侧;其结构与所述第一安装架421 的结构相同,因此不再赘述。第二驱动源包括设置在所述第二安装架441上第二电机442,与所述第二电机442相连接的第二主动齿轮443。第三输出端,包括与所述第二主动齿轮443传动连接的第二从动齿轮444,水平安装在所述第二安装架441上、一端与所述从动齿轮同轴连接、另一端与所述第三输出轮446相连接的第三转动轴445。所述第三输出端的运动原理与第一输出端的原理相同,在此不做叙述。参阅附图15,姿态检测组件450包括安装在所述第二安装架441底部的固定板451,设置在所述固定板451一侧的转轴452,固定安装在所述固定板451另一侧的拉簧457立柱453,铰接在所述转轴 452上的两个支杆454,分别转动安装在所述支杆454的两个导轮455,分别固定安装在所述支杆454上的两个挡板456,用于连接所述挡板456和拉簧457立柱453的两个拉簧457,其中,两个拉簧457之间的夹角小于始终小于180
°
,所述导轮455在拉簧457 作用下始终与安装框100相抵,避免链式机器人发生偏移。
94.在进一步实施例中,所述挡板456后方分别设置有两个位置传感器458,适于检测所述挡板456的位置变化。根据挡板456的位置变化,计算出整个链式机器人的行驶姿态,及时作出反馈,调整第一电机和第二电机442转速,实现链式机器人的位置纠偏。具体地,通过合理设计所述挡板456与所述位置传感器458的中垂线的夹角,当清扫机器人400出现偏斜时,其中一个挡板456与所对应的位置传感器458垂直时,则该位置传感器458接收到距离信息,即认为清扫机器人400偏斜达到阈值,控制板可进一步调整第一驱动组件420和第二驱动组件440的输出效率,实现纠偏。
95.在进一步实施例中,所述框架410中部安装有与所述第三输出轮446相平行的中间导轮455,且所述中间导轮455与所述第三输出轮446同轴连接。首先所述中间导轮455 起到支撑作用,其次使用人员可以根据待清理光伏板的宽度合理加长所述行走支架,然后通过在行走支架中部设置中间导轮455组件,增加行走支架的可使用区域,提高清扫效率。
96.在进一步实施例中,所述链轮机器人还包括清扫组件460;所述清扫组件460为安装在所述框架410的下方的毛刷组件或电磁清扫组件460,用于清扫光伏板。本实例中清扫
组件460以毛刷组件为例,其包括:安装在所述安装板中间位置、且输出轴穿过所述第一安装架421的第三电机,一端通过过渡轴与所述清扫电机输出轴、另一端通过毛刷轴承固定安装在桁架上的毛刷。通过清扫电机带动所述毛刷转动,实现对光伏板进行清扫,当然对于本领域技术人员而言,所述毛刷组件或电磁清扫组件460为本领域常规技术手段,当然还可以为本领域其他常规清扫组件460,在此不做赘述。
97.在进一步实施例中,所述框架410上的一侧设置有电箱411,所述电箱411内部设置有的控制板和电池,所述控制板与所述第一驱动组件420和第二驱动组件440信号连接。用于控制所述第一驱动组件420和第二驱动组件440的输出速度,实现链式机器人的位置纠偏。
98.为了方便理解电站式光伏板用链轮机器人的技术方案,对其工作原理做出简要说明:在使用时,将链式机器人卡设在光伏板的安装框100上,在第一驱动组件420一侧,由于第一驱动组件420位于安装框100较高侧,通过第一电机带动第一主动轮、第一转动轴424和第一输出轮425的转动,同时,通过第一斜齿轮426改变传动方向,进而带动所述第二转动轴427、第二输出端转动,实现通过单一驱动源对两个位于不同方向上的输出轮同周期运动。当第一输出轮425与安装框100上表面120之间的摩擦力较小时,可以通过第二输出轮428与第二安装框100的侧面之间的运动,实现机器人的行驶。在第二驱动组件440一侧,第二电机442带动第三输出轮446运动,同时由于两个拉簧457 之间的夹角小于始终小于180
°
,所述导轮455在拉簧457作用下始终与安装框100相抵,避免链式机器人发生偏移。同时,通过两个位置传感器458检测所述挡板456的位置变化,根据挡板456的位置变化,计算出整个链式机器人的行驶姿态,及时作出反馈,调整第一电机和第二电机442转速,实现链式机器人的位置纠偏。
99.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。