1.本实用新型属于感知设备技术领域,涉及适用于无人驾驶挖掘机的感知系统及挖掘机。
背景技术:
2.挖掘机是大型机械工程项目中必不可少的机械设备。挖掘机无人化改造是矿山无人化的重要内容。
3.挖掘机无人化包括两个方面:无人驾驶和无人作业。对于无人驾驶,通过多种传感器对挖掘机的周边环境进行感知,包括对障碍物位置、可行驶区域、道路边界等的感知。对于无人作业,通过多种传感器对挖掘机的作业面位置、物料信息、卸料点位置等进行精确感知。因此,需要对无人化挖掘机硬件进行合理设计,保障无人化挖掘机既能够顺利无人驾驶到作业点,又能够在作业点高效稳定地进行无人作业。
4.目前相关公司、研究机构争相研发无人驾驶技术,更多的将目光集中在乘用车及其他车型上。传感器安装主要基于以下环境对象进行选择:城市道路、高速道路或者园区道路等。主要障碍物对象是道路内行人、车辆等。例如:专利申请cn201710160870.9公开了一种车用环境感知系统及汽车,主要描述一种乘用汽车自动驾驶传感器布局。例如:专利申请cn201710969796.5公开了一种基于超声波雷达、激光雷达、毫米波雷达、可见光相机、红外光相机等传感器的感知硬件方案。虽然现有技术中已经有针对乘用车无人驾驶感知系统的传感器布局设计,但是由于乘用车与挖掘机的结构差异较大且应用场景和功能均不相同,因此无法将乘用车无人驾驶感知系统直接应用到挖掘机上,也就是说,不同车型对传感器的需求有很大区别,目前尚未有针对挖掘机的工作环境及作业需求,满足其无人化工程机械行驶和作业需求的解决方案。
技术实现要素:
5.鉴于上述问题,提出了本实用新型以便提供一种克服上述问题或者至少部分地解决上述问题的无人驾驶挖掘机感知系统及挖掘机。
6.根据本实用新型的一个方面,提供了一种无人驾驶挖掘机感知系统,所述无人驾驶挖掘机感知系统包括多线激光雷达、第一16线激光雷达、四个单线激光雷达和车载计算单元,所述多线激光雷达、所述第一16线激光雷达和所述四个单线激光雷达分别与所述车载计算单元连接:
7.所述多线激光雷达水平设置在挖掘机驾驶舱的顶部,用于获取挖掘机周围的以第一预设距离为半径的圆形区域内的目标信息;
8.所述第一16线激光雷达竖直设置于挖掘机车身的右前方和挖机臂的右侧,用于获取挖掘机前方的目标信息;
9.所述四个单线激光雷达水平设置于挖掘机车身的前后左右侧,用于获取挖掘机周围的以第二预设距离为半径的圆形区域内的目标信息,其中所述第二预设距离小于所述第
一预设距离;
10.所述车载计算单元设置于挖掘机的驾驶舱内,用于接收所述多线激光雷达、所述第一16线激光雷达和所述四个单线激光雷达获取的数据,并输出挖掘机周围的障碍物信息、可行驶区域信息和道路边界信息至矿区综合管理云平台。
11.优选地,其中第一预设距离的取值范围为大于等于 60米,第二预设距离的取值范围为0米至10米。
12.优选地,所述无人驾驶挖掘机感知系统还包括两个第一毫米波雷达和两个第二毫米波雷达,所述两个第一毫米波雷达和所述两个第二毫米波雷达分别与所述车载计算单元连接;
13.所述两个第一毫米波雷达分别设置于挖掘机车身的前侧和后侧,用于获取挖掘机前后两侧第三预设距离内的目标信息;
14.所述两个第二毫米波雷达分别设置于挖掘机车身的左前侧和右前侧,用于获取挖掘机前向左右两侧第四预设距离的目标信息,其中所述第四预设距离小于所述第三预设距离;
15.所述车载计算单元还用于接收所述两个第一毫米波雷达和所述两个第二毫米波雷达获取的数据,并输出挖掘机周围的障碍物信息、可行驶区域信息、道路边界信息和作业面信息。
16.优选地,所述第一毫米波雷达为长距毫米波雷达,所述第二毫米波雷达为短距毫米波雷达。
17.优选地,第三预设距离的取值范围为100米至200米,第四预设距离的取值范围为50米至100米。
18.优选地,所述第三预设距离为150米,所述第四预设距离为70米。
19.优选地,所述无人驾驶挖掘机感知系统还包括第二16线激光雷达,所述第二16线激光雷达与所述车载计算单元连接;
20.所述第二16线激光雷达设置于挖机臂上,所述第二16线激光雷达的扫描面平行于所述挖机臂侧面且其扫描线正对铲斗,用于获取铲斗内的物料信息;
21.所述车载计算单元还用于接收所述第二16线激光雷达获取的数据,并输出所述铲斗内物料的体积信息至矿区综合管理云平台。
22.优选地,所述无人驾驶挖掘机感知系统还包括惯性导航设备、两个gps天线和rtk信号接收器,所述惯性导航设备与所述车载计算单元连接,所述两个gps天线和所述rtk信号接收器分别与所述惯性导航设备连接;
23.所述惯性导航设备设置于挖掘机驾驶舱内,用于接收所述gps天线和rtk信号接收器获取的挖掘机的位姿信息,并输出挖掘机的位姿信息;
24.所述两个gps天线分别设置于挖掘机驾驶舱上方的左右两侧,用于获取挖掘机的位姿信息;
25.所述rtk信号接收器设置于挖掘机右侧的甲板上,用于获取挖掘机的位姿信息;
26.所述车载计算单元还用于接收所述惯性导航设备输出的挖掘机的位姿信息,并将所述挖掘机的位姿信息发送至矿区综合管理云平台。
27.优选地,所述多线激光雷达包括32线激光雷达、64线激光雷达或者128线激光雷
达。
28.根据本实用新型的另一个方面,提供了一种挖掘机,该挖掘机包括如上述的无人驾驶挖掘机感知系统。
29.本实用新型具有的有益技术效果:通过在挖掘机驾驶舱的顶部安装水平设置的多线激光雷达,确保其在水平方向扫描无盲区;通过在挖掘机车身的右前方和挖机臂的右侧竖直设置的第一16线激光雷达,以弥补多线激光雷达视野在挖机臂遮挡下形成的感知盲区;通过在挖掘机车身的前后左右侧分别水平设置的四个单线激光雷达获取挖掘机周围车身近处目标信息,有效地避免了潜在的碰撞风险。可见,本实用新型的技术方案通过在不同位置安装多个不同线束的激光雷达,有效消除了大型工程机械挖掘机的感知盲区,而且实现了挖掘机车身远近障碍物的检测,有效避免了潜在的碰撞风险。
附图说明
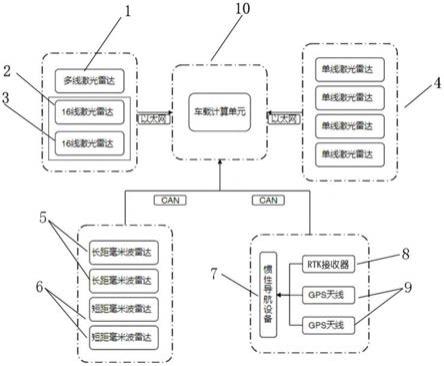
30.图1为本实用新型实施例提供的一种无人驾驶挖掘机感知系统的结构示意图;
31.图2为本实用新型实施例提供的一种无人驾驶挖掘机感知系统在挖掘机上的安装位置示意图;
32.图3为本实用新型实施例提供的一种挖掘机的结构示意图。
具体实施方式
33.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。附图中给出了本实用新型的较佳的实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本说明书所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型公开内容的理解更加透彻全面。
34.实施例一
35.图1为本实用新型实施例提供的一种无人驾驶挖掘机感知系统的结构示意图,图2为本实用新型实施例提供的一种无人驾驶挖掘机感知系统在挖掘机上的安装位置示意图,如图1和图2所示,该无人驾驶挖掘机感知系统包括:多线激光雷达1、第一16线激光雷达2、4个单线激光雷达4和车载计算单元10,多线激光雷达1、第一16线激光雷达2、4个单线激光雷达4分别与车载计算单元10连接。多线激光雷达1水平设置在挖掘机驾驶舱的顶部,用于获取挖掘机周围的以第一预设距离为半径的圆形区域内的目标信息;例如,第一预设距离的取值范围为大于等于 60米。需要说明的是,多线激光雷达水平扫描视角为360度,覆盖挖掘机周边360度范围,确保水平方向无盲区。优选地,多线激光雷达1选自32线、64线、128线激光雷达中的任意一种。只要有效检测范围大于等于60米的多线激光雷达均在本技术的保护范围内。由于多线激光雷达有效检测范围较大,确保了车身远处障碍物的检测。
36.第一16线激光雷达2竖直设置于挖掘机车身的右前方和挖机臂的右侧,优选地,将第一16线激光雷达2设置在右侧甲板上,用于获取挖掘机前方的目标信息;需要说明的是,挖机臂位于车身正前方,高于驾驶舱,由于多线激光雷达1视野在挖机臂遮挡下形成一片盲区。第一16线激光雷达垂直视角典型值为25度,正好弥补挖机臂造成的多线激光雷达感知盲区。在本实用新型的一些实施例中第一16线激光雷达2的有效检测距离为40米。
37.四个单线激光雷达4水平设置于挖掘机车身的前后左右侧,用于获取挖掘机周围
的以第二预设距离为半径的圆形区域内的目标信息,其中第二预设距离小于第一预设距离;例如,第二预设距离的取值范围为0米至10米。通过与多线激光雷达1的匹配,确保4个单线激光雷达水平安装。4个单线激光雷达组合确保了车身近处360度无盲区,确保了车身近处障碍物的检测,对于相对复杂的挖掘机工作环境,有效地避免了潜在的碰撞风险。
38.车载计算单元10设置于挖掘机的驾驶舱内,用于接收多线激光雷达1、第一16线激光雷达2和四个单线激光雷达4获取的数据,并输出挖掘机周围的障碍物信息、可行驶区域信息和道路边界信息至矿区综合管理云平台。
39.由此可见,本实用新型的技术方案通过在不同位置安装多个不同线束的激光雷达,有效消除了大型工程机械挖掘机的感知盲区,而且实现了挖掘机车身远近障碍物的检测,有效避免了潜在的碰撞风险。
40.进一步地,仍如图1和图2所示,无人驾驶挖掘机感知系统还包括两个第一毫米波雷达5和两个第二毫米波雷达6,两个第一毫米波雷达5和两个第二毫米波雷达6分别与车载计算单元连接;优选地,第一毫米波雷达5为长距毫米波雷达,第二毫米波雷达6为短距毫米波雷达。
41.两个第一毫米波雷达5分别设置于挖掘机车身的前侧和后侧,用于获取挖掘机前后两侧第三预设距离内的目标信息;优选地,第三预设距离的取值范围为100米至200米,具体地,第三预设距离为150米。可见,第一毫米波雷达5用于对挖掘机车身前后远距离目标进行稳定检测和跟踪,并通过与上述激光雷达进行融合,增加了远处障碍物检测的可靠性和冗余性。
42.两个第二毫米波雷达6分别设置于挖掘机车身的左前侧和右前侧,用于获取挖掘机前向左右两侧第四预设距离的目标信息,其中第四预设距离小于第三预设距离;优选地,第四预设距离的取值范围为50米至100米,具体地,第四预设距离为70米。可见,第二毫米波雷达6用于对挖掘机车身前后近距离目标进行稳定检测和跟踪,并通过与上述激光雷达进行融合,增加了近处障碍物检测的可靠性和冗余性。
43.所述车载计算单元10还用于接收所述两个第一毫米波雷达5和所述两个第二毫米波雷达6获取的数据,并输出挖掘机周围的障碍物信息、可行驶区域信息、道路边界信息和作业面信息。
44.由此可见,本实用新型的技术方案通过额外设置多个毫米波雷达,不仅进一步提高了挖掘机车身周围环境感知的准确性和稳定性,增加了挖掘机无人驾驶的安全性和舒适性;而且通过设置在挖掘机车身前侧的第一毫米波雷达以及设置于挖掘机车身的左前侧和右前侧的两个第二毫米波雷达,提高了对挖掘机作业面的检测能力,有助于提升挖掘机的作业精度和效率。
45.进一步地,仍如图1和图2所示,所述无人驾驶挖掘机感知系统还包括第二16线激光雷达3,所述第二16线激光雷达3与所述车载计算单元10连接;
46.所述第二16线激光雷达3设置于挖机臂上,所述第二16线激光雷达3的扫描面平行于所述挖机臂侧面且其扫描线正对铲斗,用于获取铲斗内的物料信息;
47.所述车载计算单元10还用于接收所述第二16线激光雷达3获取的数据,并输出所述铲斗内物料的体积信息至矿区综合管理云平台。
48.由此可见,本实用新型的设计方案通过在挖机臂上安装第二16线激光雷达,可以
有效地检测铲斗内的物料状态,有助于挖掘机的精准作业。
49.进一步地,仍如图1和图2所示,无人驾驶挖掘机感知系统还包括惯性导航设备7、两个gps天线9和rtk信号接收器8,惯性导航设备7与车载计算单元10连接,两个gps天线9和rtk信号接收器8分别与惯性导航设备7连接;
50.惯性导航设备7设置于挖掘机驾驶舱内,用于接收gps天线9和rtk信号接收器8获取的挖掘机的位姿信息,并输出挖掘机的位姿信息;
51.两个gps天线9分别设置于挖掘机驾驶舱上方的左右两侧,用于获取挖掘机的位姿信息;
52.rtk信号接收器8设置于挖掘机右侧的甲板上,用于获取挖掘机的位姿信息;
53.车载计算单元10还用于接收惯性导航设备7输出的挖掘机的位姿信息,并将该挖掘机的位姿信息发送至矿区综合管理云平台。
54.由此可见,本实用新型的设计方案通过设置惯性导航设备、两个gps天线和rtk信号接收器获取挖机当前的位姿信息,并通过车载计算单元将该位姿信息上传至矿区综合管理平台,便于矿区综合管理平台对挖掘机的行驶路径进行规划以实现对挖掘机的调度。
55.本实施例中,多线激光雷达1、第一16线激光雷达2、第二16线激光雷达3、4个单线激光雷达4分别通过以太网口与车载计算单元10连接,长距和短距毫米波雷达、惯性导航设备7通过can口与车载计算单元10相连。rtk信号接收器8、gps天线9与惯性导航设备7相连。需要说明的是,在其他实施例中,各个传感器与车载计算单元10之间既可以通过有线方式进行数据通信,也可以通过无线方式进行数据通信;rtk信号接收器8、gps天线9与惯性导航设备7之间即可通过有线方式通信,也可以通过无线方式通信,本技术对各个传感器之间的通信方式以各个传感器与车载计算单元之间的通信方式不作进一步限定。
56.实施例二
57.图3为本实用新型实施例提供的一种挖掘机的结构示意图,如图3所示,该挖掘机100包括如实施例一所述的无人驾驶挖掘机感知系统200。需要说明的是,无人驾驶挖掘机感知系统200的构成、安装位置以及技术效果在实施例一中已经详细描述在此不再赘述。
58.综上所述,首先,本实用新型的技术方案通过在不同位置安装多个不同线束的激光雷达,有效消除了大型工程机械挖掘机的感知盲区,而且实现了挖掘机车身远近障碍物的检测,有效避免了潜在的碰撞风险。
59.另外,本实用新型的技术方案通过额外设置多个毫米波雷达,不仅进一步提高了挖掘机车身周围环境感知的准确性和稳定性,增加了挖掘机无人驾驶的安全性和舒适性;而且通过设置在挖掘机车身前侧的第一毫米波雷达以及设置于挖掘机车身的左前侧和右前侧的两个第二毫米波雷达,提高了对挖掘机作业面的检测能力,有助于提升挖掘机的作业精度和效率。
60.再者,本实用新型的设计方案通过在挖机臂上安装第二16线激光雷达,可以有效地检测铲斗内的物料状态,有助于挖掘机的精准作业。
61.最后,本实用新型的设计方案通过设置惯性导航设备、两个gps天线和rtk信号接收器获取挖机当前的位姿信息,并通过车载计算单元将该位姿信息上传至矿区综合管理平台,便于矿区综合管理平台对挖掘机的行驶路径进行规划以实现对挖掘机的调度。
62.以上所述仅为本技术的较佳实施例而已,并非用于限定本技术的保护范围。凡在
本技术的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本技术的保护范围内。