1.本发明涉及道路围挡的施工领域,具体是一种城市道路围挡大断面混凝土基础滑模施工方法。
背景技术:
2.由于施工阶段需要占用既有道路,在既有道路上施工即面临施工现场封闭围挡问题,为保证施工和交通安全,围挡必须设置坚固可靠的混凝土基础。目前国内外城市道路围挡施工较为普遍,常规做法均是采用人工支立模板浇筑混凝土基础,浇筑完成后采用膨胀螺丝及斜撑对栏片进行固定。而人工支立模板存在施工安全和工期的缺点:(1)人工作业速度慢,作业质量存在不稳定性。(2)路面车流量巨大且施工作业人员多,安全风险大。(3)混凝土需等强后拆模,施工周期长。(4)周转材料多,且基础施工完成后模板无法再利用。(5)模板采用钉子固定在既有路面上,对路面产生破坏。
技术实现要素:
3.本发明要解决的技术问题是提供一种城市道路围挡大断面混凝土基础滑模施工方法,采用滑模机浇筑的方式,并在滑模机上设置有专用围挡基础模具,在滑模机线性行走的过程,实现围挡大断面混凝土基础快速浇筑成型的目的,降低了施工成本,大大提高了围挡基础的施工效率。
4.本发明的技术方案为:
5.城市道路围挡大断面混凝土基础滑模施工方法,具体包括有以下步骤:
6.(1)、施工放样:每隔一段设定距离精确地放出中桩,据此中桩并向两侧设计距离定出围挡基础的边线,施工前,每隔一段设定距离打上钢钎,高度调整为围挡基础设计高度,然后在钢钎上挂上尼龙绳,尼龙绳的绳平面根据实际离开围挡基础边线一定距离,以保证滑模机能通过;
7.(2)、首先将滑模机移至施工现场,采用滑模机浇筑围挡基础;所述的滑模机包括有机体,设置于机体上的自动操控平台、三个升降式行走履带轮、混凝土料仓、专用围挡基础模具和自动行走导航系统;三个升降式行走履带轮中,其中两个升降式行走履带轮支撑于机体的前端作为前轮,另一个升降式行走履带轮支撑于机体的后端作为后轮;专用围挡基础模具包括有设置于机体上的液压千斤顶、与液压千斤顶连接的模具箱体和连接于模具箱体顶端的进料斗,混凝土料仓的出口朝向进料斗顶端的进口,液压千斤顶的液压活塞杆竖直向下延伸,模具箱体连接于液压活塞杆的底端上,模具箱体的尾端设置开口朝向机体后端的出料口,出料口的截面与围挡基础的纵向截面一致,滑模机行进的同时,模具箱体尾端出料口挤出的混凝土沿行走的线性浇筑出围挡基础;所述的前轮与机体连接的位置处设置有水平高度传感器,每个升降式行走履带轮均是通过旋转气缸带动进行转向操作,每个旋转气缸上均连接有转向角度传感器,自动行走导航系统包括有固定于机体上且与自动操控平台连接的导航控制器、与导航控制器连接的磁导航传感器、以及与磁导航传感器连接
的磁力探测杆,滑模机的行走线路上布设有与磁力探测杆匹配的磁性钢丝绳,所述的水平高度传感器、转向角度传感器、磁导航传感器、升降式行走履带轮均与自动操控平台连接;
8.(3)、往刚成型的围挡基础的上表面均匀加上一层砂浆后,做抹平光面处理,最后进行混凝土养生和雨水口胀缝施工即可。
9.所述的升降式行走履带轮包括有液压升降气缸、连接于液压升降气缸底端的旋转气缸、与旋转气缸连接的u型转向板、以及与u型转向板连接的驱动履带轮,液压升降气缸、旋转气缸、驱动履带轮的驱动机构均与自动操控平台连接,液压升降气缸驱动伸缩,使得机体实现升降调节,u型转向板的水平部分固定于旋转气缸的旋转轴上,u型转向板的两竖直部分分别位于驱动履带轮的两侧夹持驱动履带轮,使得旋转气缸通过u型转向板带动驱动履带轮实现转向调节。
10.所述的专用围挡基础模具设置于机体的一侧方。
11.所述的专用围挡基础模具的进料斗内设置有与自动操控平台连接驱动的电动振捣棒。
12.所述的自动行走导航系统还包括有固定于机体上且与导航控制器连接的升降气缸,磁导航传感器固定于升降气缸的底端上,导航控制器控制升降气缸带动磁导航传感器和磁力探测杆进行高度调节,使得磁力探测杆可随机体的高度进行相应的高度调节。
13.所述的液压千斤顶液压活塞杆的底端连接有吊架,所述的模具箱体连接于吊架上。
14.所述的步骤(3)中,砂浆是由砂、水泥和水按照2:1:1的质量比混合而成,且其中掺加少量触变润滑剂,使用砂浆来消除混凝土表面气泡和收面。
15.本发明的优点:
16.(1)、本发明在滑模机上设置有专用围挡基础模具,在滑模机线性行走的过程,混凝土由专用围挡基础模具的出料口挤出,且出料口的截面与围挡基础的纵向截面一致,使得从专用围挡基础模具挤出的混凝土可自动成型,实现围挡基础的一次性浇筑成型,降低了施工成本,大大提高了围挡基础的施工效率,且机械作业均处在封闭范围内,作业人员少且无周转材料,可大大提高施工安全性;
17.(2)、本发明滑模机的专用围挡基础模具可根据施工路面的高度调节其水平高度,确保围挡基础的施工质量;
18.(3)、本发明滑模机设置有自动行走导航系统,采用磁导航技术进行自动导航行走,无需操作人员驾驶,其灵敏度、精确度极高,且浇筑后的路围挡基础顺直,线形流畅,从而使标高达到了设计要求且平整度好;
19.(4)、本发明混凝土浇筑后,采用掺入少量润滑剂的1:2水泥砂浆来消除混凝土表面气泡和收面,使得围挡基础符合外观要求。
附图说明
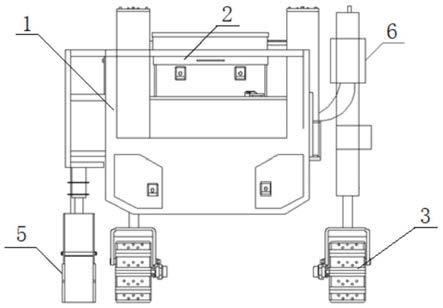
20.图1是本发明滑模机的后视图。
21.图2是本发明滑模机的右视图。
22.图3是本发明专用围挡基础模具的结构示意图。
23.图4是本发明自动行走导航系统的结构示意图。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.见图1-图4,城市道路围挡大断面混凝土基础滑模施工方法,具体包括有以下步骤:
26.(1)、施工放样:每隔200m精确地放出中桩,据此用j2经纬仪放出10m中桩并向两侧设计距离定出围挡基础的边线,施工前,每隔10m打上钢钎,高度调整为围挡基础设计高度,然后在钢钎上挂上150m长、3mm粗的尼龙绳,尼龙绳的绳平面根据实际离开围挡基础边线一定距离,以保证滑模机能通过;
27.(2)、首先将滑模机移至施工现场,采用滑模机浇筑围挡基础;
28.滑模机包括有机体1,设置于机体1上的自动操控平台2、三个升降式行走履带轮3、混凝土料仓4、专用围挡基础模具5和自动行走导航系统6;
29.三个升降式行走履带轮3中,其中两个升降式行走履带轮3支撑于机体1的前端作为前轮,另一个升降式行走履带轮3支撑于机体1的后端作为后轮;
30.专用围挡基础模具5设置于机体1的一侧方,便于道路边缘处围挡基础的施工,专用围挡基础模具包括有设置于机体1上的液压千斤顶51、吊架52、模具箱体53和连接于模具箱体53顶端的进料斗54,混凝土料仓4的出口朝向进料斗54顶端的进口55,进料斗54内设置有与自动操控平台2连接驱动的电动振捣棒7,液压千斤顶51的液压活塞杆竖直向下延伸,吊架52连接于液压活塞杆的底端上,模具箱体53连接于吊架52上,模具箱体53的尾端设置开口朝向机体1后端的出料口56,出料口56的截面与围挡基础的纵向截面一致,滑模机行进的同时,模具箱体尾端出料口56流出的混凝土沿行走的线性浇筑出围挡基础;前轮与机体1连接的位置处设置有水平高度传感器,升降式行走履带轮3包括有液压升降气缸31、连接于液压升降气缸31底端的旋转气缸32、与旋转气缸32连接的u型转向板33、以及与u型转向板34连接的驱动履带轮34,液压升降气缸31、旋转气缸32、驱动履带轮34的驱动机构均与自动操控平台2连接,液压升降气缸31驱动伸缩,使得机体1实现升降调节,u型转向板33的水平部分固定于旋转气缸32的旋转轴上,u型转向板33的两竖直部分分别位于驱动履带轮34的两侧夹持驱动履带轮,使得旋转气缸32通过u型转向板33带动驱动履带轮34实现转向调节,每个旋转气缸32上均连接有转向角度传感器,自动行走导航系统6包括有固定于机体1上且与自动操控平台2连接的导航控制器61、固定于机体1上且与导航控制器61连接的升降气缸62、与导航控制器61连接的磁导航传感器63、以及与磁导航传感器63连接的磁力探测杆64,磁导航传感器63固定于升降气缸62的底端上,导航控制器61控制升降气缸62带动磁导航传感器63和磁力探测杆64进行高度调节,使得磁力探测杆64可随机体1的高度进行相应的高度调节,滑模机的行走线路上布设有与磁力探测杆64匹配的磁性钢丝绳,使得滑模机在磁导航传感器63的作用下沿着磁性钢丝绳进行导航行走,水平高度传感器、转向角度传感器、磁导航传感器63均与自动操控平台2连接;
31.(3)、往刚成型的围挡基础的上表面均匀加上2mm厚的砂浆后,做抹平光面处理,最后进行混凝土养生和雨水口胀缝施工即可;其中,砂浆是由砂、水泥和水按照2:1:1的质量
比混合而成,且其中掺加少量触变润滑剂,使用砂浆来消除混凝土表面气泡和收面。
32.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。