1.本实用新型涉及竹竿加工技术领域,特别涉及一种竹段自动裁断机。
背景技术:
2.在加工竹竿的过程中,需按要求对竹竿按进行定尺长度切断,现有基本是人工操作进行切断,一次只能切断一段,人工操作环境恶劣,不仅工作效率低,且安全事故时有发生,为此亟需一种能够按照要求自动切断竹竿的设备来代替人工切断竹竿。
技术实现要素:
3.本实用新型的目的在于提供一种竹段自动裁断机,可代替人工对竹竿进行切断且效率高、能够有效较少安全问题。
4.本实用新型提供一种竹段自动裁断机,包括幅盘、电动锯片机组和与所述电动锯片机组垂直设置的送料机构,所述电动锯片机组包括排成一字型的多个电动锯片机,所述电动锯片机的锯片的旋转方向垂直于所述电动锯片机组的排列方向,所述幅盘包括位于中心的旋转盘和自所述旋转盘向四周延伸的多根辐条,每一所述辐条均与所述锯片平行,每一所述辐条上均设有夹持竹竿的夹持机构,所述送料机构上设有取料区,位于所述取料区的竹竿相对所述辐条垂直,所述幅盘的旋转方向使其辐条能够从下至上穿过所述取料区以使所述夹持机构能够取走位于所述取料区的竹竿,且使所述辐条自上而下经过所述电动锯片机组的延伸方向而使竹竿被多个所述电动锯片机裁断成多段。
5.进一步地,所述电动锯片机组包括机架,多个所述电动锯片机呈一字型的固定于所述机架。
6.进一步地,所述机架上设有多个安装座,一所述安装座可安装一所述电动锯片机,全部或者部分所述安装座上安装有所述电动锯片机。
7.进一步地,所述机架上固定有电机,一主轴被所述机架可旋转的支撑,所述主轴的一端连接所述电机以被所述电机驱动旋转,另一端连接所述旋转盘以驱动所述旋转盘旋转。
8.进一步地,所述机架远离所述幅盘的一端设有废料收集槽,用于收集竹竿被裁断的竿头。
9.进一步地,所述夹持机构包括与对应的辐条平行设置的夹紧气缸、与所述夹紧气缸伸缩杆末端连接的夹紧头、固定于对应辐条的导向装置和位于对应辐条末端的夹紧v形块,所述夹紧头可滑动的与所述导向装置连接,所述夹紧v形块的 v形面朝向对应的所述夹紧头,且所述导向装置位于对应的所述夹紧v形块与夹紧气缸之间,所述夹持机构通过夹紧气缸推动所述夹紧头沿所述导向装置运动而使竹竿被所述夹紧头和夹紧v形块夹持或释放。
10.进一步地,所述幅盘的一侧设有收料架,用于收集竹竿被裁断的竿尾,所述收料架与所述送料机构相对设置,所述收料架包括导料板和收料槽,所述导料板的一端朝向所述
幅盘且向上倾斜,另一端朝向所述收料槽。
11.进一步地,所述辐条有6根,相邻二所述辐条之间的夹角为60
°
,每一所述辐条上均设有角度传感器,每一所述角度传感器均与对应的夹紧气缸连接,所述辐条在第一角度区间时,所述夹紧气缸的伸缩杆处于收缩状态而使所述夹紧头远离对应的所述夹紧v形块,所述辐条在第二角度区间时,所述夹紧气缸的伸缩杆处于伸长状态而使所述夹紧头靠近对应的所述夹紧v形块,所述第二角度区间大于所述第一角度区间,且竹竿被裁断时所述辐条所处的角度小于所述第二角度区域的最大角度。
12.进一步地,所述送料机构包括送料架、安装于所述送料架且与所述送料架平行的送料气缸、与所述送料气缸伸缩杆的末端连接的送料头、安装于所述送料架的导轨和位于所述送料架末端区域的所述取料区,所述送料头与所述导轨滑动连接,且所述导轨位于所述取料区与所述送料气缸之间,所述送料气缸通驱动其伸缩杆伸长而使所述送料头推动竹竿进入所述取料区。
13.进一步地,所述送料架上还设有挡料机构,所述挡料机构包括固定于所述送料架的挡料气缸、与所述挡料气缸的旋转杆连接的翻转挡料杆和设于所述送料架末端且邻接所述取料区的止挡块,所述翻转挡料杆随所述旋转杆的旋转而具有止挡状态,处于止挡状态时的翻转挡料杆的最高端高于所述送料架且所述翻转挡料杆与所述导轨位置始终错开,所述取料区位于所述止挡块与处于止挡状态的翻转挡料杆之间。
14.本实用新型的技术效果:
15.本实用新型具有的技术效果:
16.(1)取代人工对竹竿进行定尺长度切断,不仅解放劳动力,同时可以有效减少安全事故,确保工人的安全;
17.(2)一次可将竹竿切割成多段,能够极大的提高工作效率;
18.(3)可通过调整幅盘与电动锯片机组之间的间距、调整相邻电动锯片机之间的距离,可实现对竹竿切割长度的调整;
19.(4)通过控制电动锯片机启动的数量,可实现对竹竿切割段数的调整。
附图说明
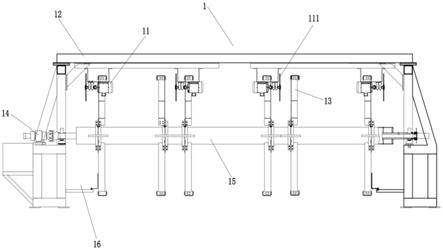
20.图1是本实用新型一种竹段自动裁断机的电动锯片机组的示意图;
21.图2是本实用新型一种竹段自动裁断机的幅盘和送料机构的示意图;
22.图中:1电动锯片机组;11电动锯片机;111锯片;12机架;13安装座; 14电机;15主轴;16废料收集槽;
23.2幅盘;21旋转盘;22辐条;23夹持机构;231夹紧气缸;232夹紧头; 233导向装置;234夹紧v形状;
24.3送料机构;31送料架;32送料气缸;33导轨;34挡料机构;341挡料气缸;342翻转挡料杆;343止挡块;35取料区;36收料架;361导料板;362 收料槽;37送料头;
25.4竹竿。
具体实施方式
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新
型实施方式作进一步地描述。
27.请参照图1至图2,本实用新型提供一种竹段自动裁断机,用来取代人工对竹竿进行切断作业,主要包括幅盘2、电动锯片机组1和与所述电动锯片机组1垂直设置的送料机构3。
28.请参照图1,所述电动锯片机组1包括排成一字型的多个电动锯片机11,所述电动锯片机11的锯片111的旋转方向垂直于所述电动锯片机组1的排列方向,从而在多个所述电动锯片机11同时运作时可以将一根竹竿4一次性裁断成多段,从而可以大大提高对竹竿4的裁断效率,且通过设置相邻两所述电动锯片机11 之间的间隔,可以控制竹竿4的切断长度。
29.本实施例中,所述电动锯片机组1包括机架12,多个所述电动锯片机11呈一字型的固定于所述机架12,具体地,所述机架12上设有多个安装座13,一所述安装座13可安装一所述电动锯片机11:(1)根据需要将一根竹竿4切成的段数,来选择电动锯片机11的数量,从而全部或者部分所述安装座13上安装有所述电动锯片机11或者所有安装座13上均安装有所述电动锯片机11但全部或部分启动所述电动锯片机11;(2)根据竹竿4的切割长度要求,可以间隔的选择安装座13来安装电动锯片机11或者启动间隔合适的电动锯片机11。
30.所述幅盘2包括位于中心的旋转盘21和自所述旋转盘21向四周延伸的多根辐条22,每一所述辐条22均与所述锯片111平行,每一所述辐条22上均设有夹持竹竿4的夹持机构23,所述送料机构3上设有取料区35,位于所述取料区 35的竹竿4相对所述辐条22垂直,所述幅盘2的旋转方向使其辐条22能够从下至上穿过所述取料区35以使所述夹持机构23能够取走位于所述取料区35的竹竿4,且使所述辐条22自上而下经过所述电动锯片机组1的延伸方向而使竹竿4被多个所述电动锯片机11裁断成多段。
31.所述夹持机构23包括与对应的辐条22平行设置的夹紧气缸231、与所述夹紧气缸231伸缩杆末端连接的夹紧头232、固定于对应辐条22的导向装置233 和位于对应辐条22末端的夹紧v形块234,所述夹紧头232可滑动的与所述导向装置233连接,所述夹紧v形块234的v形面朝向对应的所述夹紧头232,且所述导向装置233位于对应的所述夹紧v形块234与夹紧气缸231之间,所述夹持机构23通过夹紧气缸231推动所述夹紧头232沿所述导向装置233运动而使竹竿4被所述夹紧头232和夹紧v形块234夹持或释放。
32.本实施例中,所述辐条22有6根,相邻二所述辐条22之间的夹角为60
°
,每一所述辐条22上均设有角度传感器,每一所述角度传感器均与对应的夹紧气缸231连接,所述辐条22在第一角度区间时,所述夹紧气缸231的伸缩杆处于收缩状态而使所述夹紧头232远离对应的所述夹紧v形块234,所述辐条22在第二角度区间时,所述夹紧气缸231的伸缩杆处于伸长状态而使所述夹紧头232 靠近对应的所述夹紧v形块234,所述第二角度区间大于所述第一角度区间,且竹竿4被裁断时所述辐条22所处的角度小于所述第二角度区域的最大角度。
33.所述机架12上固定有电机14,一主轴15被所述机架12可旋转的支撑,所述主轴15的一端连接所述电机14以被所述电机14驱动旋转,另一端连接所述旋转盘21以驱动所述旋转盘21旋转。所述机架12远离所述幅盘21的一端设有废料收集槽16,用于收集竹竿4被裁断的竿头。所述幅盘2的一侧设有收料架 36,用于收集竹竿4被裁断的竿尾,所述收料架36与所述送料机构3相对设置,所述收料架36包括导料板361和收料槽362,所述导料板361的一端朝向所述幅盘2且向上倾斜,另一端朝向所述收料槽362。
34.所述送料机构3包括送料架31、安装于所述送料架31且与所述送料架31 平行的送
料气缸32、与所述送料气缸32伸缩杆的末端连接的送料头37、安装于所述送料架31的导轨33和位于所述送料架31末端区域的所述取料区35,所述送料头37与所述导轨33滑动连接,且所述导轨33位于所述取料区35与所述送料气缸32之间,所述送料气缸32通驱动其伸缩杆伸长而使所述送料头37推动竹竿4进入所述取料区35。
35.所述送料架31上还设有挡料机构34,所述挡料机构34包括固定于所述送料架的挡料气缸341、与所述挡料气缸341的旋转杆连接的翻转挡料杆342和设于所述送料架31末端且邻接所述取料区35的止挡块343,所述翻转挡料杆342 随所述旋转杆的旋转而具有止挡状态,处于止挡状态时的翻转挡料杆342的最高端高于所述送料架31且所述翻转挡料杆342与所述导轨33位置始终错开,所述取料区35位于所述止挡块343与处于止挡状态的翻转挡料杆342之间。
36.本实用新型所述的竹段自动裁断机的工作流程为:
37.(1)电机14驱动所述主轴15旋转,而使与所述主轴15连接的所述旋转盘 21转动,从而所述辐条22携带对应所述夹持机构23转动;
38.(2)位于所述送料机构3的一竹竿4,被所述送料气缸32驱动的送料头37 沿所述导轨33推送至所述取料区35并抵顶所述止挡块343,所述挡料气缸341 驱动所述翻转挡料杆342向上翻转而进入止挡状态,此时所述竹竿4处于取料区 35且位于所述止挡块343与所述翻转挡料杆342之间,且此时所述竹竿4并未被所述止挡块343与所述翻转挡料杆342夹紧而在所述取料区35可自由来回滚动;然后,所述送料气缸32驱动的送料头37沿所述导轨33收缩并复位,准备推送下一竹竿4进入取料区35。
39.(3)辐条22随所述旋转盘21转动,并通过所述角度传感器实时监测对应的辐条22所处的角度,在所述辐条22处于第一角度区域时,在所述夹紧气缸 231的作用下,所述夹紧头232远离对应的夹紧v形块234,使所述夹紧头232 与夹紧v形块234之间的距离大于竹竿4的直径,在所述第一夹角区域即将进入第二夹角区域时,所述辐条22末端的夹紧v形块234自下而上伸入所述取料区 35,使竹竿4位于所述夹紧v形块234与对应的夹紧头232之间;然后,进入所述第二角度区域,所述夹紧气缸231驱动所述夹紧头232沿所述导向装置233 向所述夹紧v形块234靠近直至夹紧竹竿4。
40.(4)抓取并夹紧竹竿4后,所述幅盘2继续转动,竹竿4被旋转从上至下经过所述电动锯片机组1时,被裁断成多段,同时竹竿4的竿头自动落入废料收集槽16,被所述夹持机构23夹持的竿尾继续被夹持,且继续随所述辐条22的转动而转动,当即将旋转至所述收料架36时,所述辐条22亦从第二角度区域进入第一角度区域,在所述夹紧气缸231的作用下,所述夹紧头232远离对应的夹紧v形块234,使所述夹紧头232与夹紧v形块234之间的距离大于竹竿4的直径,在所述竿尾自身重力的作用下,该竿尾自动落在所述导料板361,并沿所述导料板361自动滚入所述收料槽362中,同时所述辐条22继续旋转,准备再次抓取被推送至取料区35的下一竹竿4。
41.本实用新型具有的技术效果:
42.(1)取代人工对竹竿进行定尺长度切断,不仅解放劳动力,同时可以有效减少安全事故,确保工人的安全;
43.(2)一次可将竹竿切割成多段,能够极大的提高工作效率;
44.(3)可通过调整幅盘与电动锯片机组之间的间距、调整相邻电动锯片机之间的距
离,可实现对竹竿切割长度的调整;
45.(4)通过控制电动锯片机启动的数量,可实现对竹竿切割段数的调整。
46.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
47.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。