:
1.本实用新型涉及活鱼智能分拣领域,尤其涉及一种活鱼智能分拣上料装置。
背景技术:
2.中国目前是世界上领先的水产养殖生产国,2018年占全球产量的58%。但是,在水产品实现自动化标准流程的领域上国内还是一片空白,目前国内对于水产品的挑选、清理等工序主要以人工为主,而这种传统的方式在实际中容易对人造成劳动损伤,同时人工的效率低下。因此,减轻劳动强度,缓解劳动力短缺,实现水产品的自动化标准流程的问题显得极为重要。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种活鱼智能分拣上料装置,应用该实用新型实现活鱼的活体分拣上料。
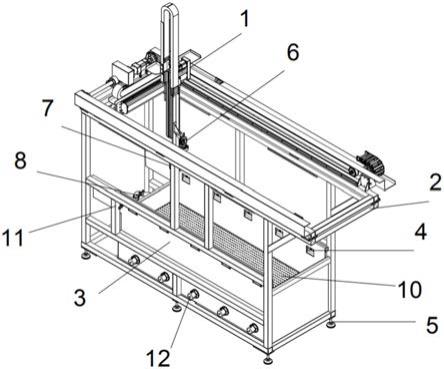
4.2、本实用新型实施例提供的一种活鱼智能分拣上料装置,其包括:三轴机械手1、机架2、水箱3、喷淋头4、脚杯5、视觉相机6、吸料装置7、水泵8,所述三轴机械手1设于机架)上方,作为装置的运动控制,所述水箱3设于机架2中下方,所述喷淋头4设于水箱 3侧面、所述脚杯5设于机架2底部,所述视觉相机6和所述吸料装置7设于三轴机械手1的末端,所述水泵8设于水箱3外部侧边。
5.可选地,所述机架2为一个长方体支架,六个脚向下延伸,所述脚杯5设于机架2的六个延伸脚的末端。
6.可选地,所述水箱3内部安装有网孔板9,底部设有加热头12。
7.可选地,所述喷淋头4连接喷淋管11设于水箱3侧面。
8.可选地,所述吸料装置7由吸取立柱13、吸取弹簧14、吸盘15组成。
9.可选地,所述水泵8连接进水口9和喷淋管11设于水箱3外部侧边。
附图说明
10.此处说明的附图用来提供对本实用新型的进一步理解。
11.图1是本实用新型实施例1提供的一种活鱼智能分拣上料装置的立体结构示意图。
12.图2是本实用新型实施例1提供的一种活鱼智能分拣上料装置的侧边结构示意图。
13.图3是本实用新型实施例1提供的一种活鱼智能分拣上料装置的吸取装置的立体结构示意图。
14.附图标记:
15.1:三轴机械手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2:机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3:水箱
16.4:喷淋头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5:脚杯
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6:视觉相机
17.7:吸料装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8:水泵
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9:进水口
18.10:网孔板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11:喷淋管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12:加热头
19.13:吸取立柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14:吸取弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀ
15:吸盘
具体实施方式:
20.下面将结合附图以及具体实施例来详细说明本实用新型,在此本实用新型的示意性实施例以及说明用来解释本实用新型,但并不作为本实用新型的限定。
21.实施例1
22.3、参见图1、图2、图3所示,本实用新型实施例提供的一种活鱼智能分拣上料装置,其包括:其包括:三轴机械手1、机架2、水箱3、喷淋头4、脚杯5、视觉相机6、吸料装置7、水泵8,所述三轴机械手1设于机架)上方,作为装置的运动控制,所述水箱3设于机架2中下方,所述喷淋头4设于水箱3侧面、所述脚杯5设于机架2底部,所述视觉相机6和所述吸料装置7设于三轴机械手1的末端,所述水泵8设于水箱3外部侧边。
23.所述机架2为一个长方体支架,六个脚向下延伸,所述脚杯5设于机架2的六个延伸脚的末端。所述水箱3内部安装有网孔板9,底部设有加热头12。所述喷淋头4连接喷淋管11设于水箱3侧面。所述所述吸料装置7由吸取立柱13、吸取弹簧14、吸盘15组成。所述水泵8连接进水口9和喷淋管11设于水箱3外部侧边。
24.该设备的工作原理是:开始工作时,工人启动设备,进水口9进水通过水泵8连通喷淋管10,通过喷淋头4向箱内喷水,当水箱3 内存在一定的水量后,加热头12启动,进水口9停止进水,水泵8 开始工作,将加热到一定温度的温水通过喷淋头4固定喷洒,工人将活鱼放置入水箱3中,当温水喷洒在活鱼的表面时,活鱼受到刺激会活跃起来,同时,视觉相机6判断鱼是否具有动态特征及位置,三轴机械手1到达活鱼的位置上方后,吸取立柱13连接吸取装置7向下,利用吸盘15吸取活鱼向上运动,吸取弹簧14起缓冲作用,接着三轴机械手1向右运动,把活鱼输送出去,完成一次操作,重复上述运动。所述一种活鱼智能分拣上料装置自动化程度高,实现了无人化自动分拣活体活鱼。
25.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种活鱼智能分拣上料装置,其特征在于:其包括:三轴机械手(1)、机架(2)、水箱(3)、喷淋头(4)、脚杯(5)、视觉相机(6)、吸料装置(7)、水泵(8),所述三轴机械手(1)设于机架(2)上方,作为装置的运动控制,所述水箱(3)设于机架(2)中下方,所述喷淋头(4)设于水箱(3)侧面、所述脚杯(5)设于机架(2)底部,所述视觉相机(6)和所述吸料装置(7)设于三轴机械手(1)的末端,所述水泵(8)设于水箱(3)外部侧边。2.根据权利要求1所述的一种活鱼智能分拣上料装置,其特征在于:所述机架(2)为一个长方体支架,六个脚向下延伸,所述脚杯(5)设于机架(2)的六个延伸脚的末端。3.根据权利要求1所述的一种活鱼智能分拣上料装置,其特征在于:所述水箱(3)内部安装有网孔板(10),底部设有加热头(12)。4.根据权利要求1所述的一种活鱼智能分拣上料装置,其特征在于:所述喷淋头(4)连接喷淋管(11)设于水箱(3)侧面。5.根据权利要求1所述的一种活鱼智能分拣上料装置,其特征在于:所述吸料装置(7)由吸取立柱(13)、吸取弹簧(14)、吸盘(15)组成。6.根据权利要求1所述的一种活鱼智能分拣上料装置,其特征在于:所述水泵(8)连接进水口(9)和喷淋管(11)设于水箱(3)外部侧边。
技术总结
本实用新型涉及活鱼智能分拣领域,提出一种活鱼智能分拣上料装置,其主要包括:三轴机械手1、机架2、水箱3、喷淋头4、脚杯5、视觉相机6、吸料装置7、水泵8,所述三轴机械手1设于机架2上方,作为装置的运动控制,所述水箱3设于机架2中下方,所述喷淋头4设于水箱3侧面、所述脚杯5设于机架2底部,所述视觉相机6和所述吸料装置7设于三轴机械手1的末端,所述水泵8设于水箱3外部侧边。该设备自动化程度高,实现了无人化自动分拣活体活鱼。人化自动分拣活体活鱼。人化自动分拣活体活鱼。
技术研发人员:庞丙春 张胜 邹光富 金森佳纪
受保护的技术使用者:广东若铂智能机器人有限公司
技术研发日:2021.05.06
技术公布日:2022/2/8