1.本实用新型涉及养殖无人船技术领域,具体是一种基于飞控控制的养殖无人船。
背景技术:
2.飞控又称飞行控制器,是用于在起飞、巡航、降落等阶段辅助或全自主对飞行器的其他系统及元器件起到协同控制的元件;近些年,随着稻田、藕塘、浅滩生态养殖行业的兴起,尤其是稻田养殖小龙虾,其中饲料投喂、药物泼洒的工作多数靠人工划船作业。
3.现有的船载推进器及遥控船在应用时也需要人操作推进器或者遥控器,而现有的无人船有遥控器控制、超声波测距控制,也有一些养殖无人船可以自动投料和喷洒药物的实例,其实现方法和机械结构过于复杂,操作不便,制造成本高,无法广泛推广应用。
技术实现要素:
4.本实用新型的目的在于提供一种基于飞控控制的养殖无人船,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种基于飞控控制的养殖无人船,包括船体,所述船体的顶部一侧安装有主机,主机的一侧安装有指示灯,指示灯的底端通过支撑柱固定安装于船体上,船体的中间位置安装有投料机,投料机的两侧通过支撑底座分别安装有动力轮,动力轮的外侧通过固定螺栓安装有防护壳,防护壳固定于船体的顶部;所述投料机远离主机的一侧安装有喷洒组件,喷洒组件远离投料机的一侧安装有超声波传感器,超声波传感器的顶部与摄像头转动连接。
7.作为本实用新型进一步的方案:所述喷洒组件包括有水箱、水泵、摇摆舵机和喷头;所述水箱安装于船体的顶部靠近投料机的一侧,水箱通过水输出管道与水泵输入端连接,水泵输出端安装有水输送管道,水输送管道的外端与摇摆舵机相连接,摇摆舵机通过连接座与喷头转动连接。
8.作为本实用新型进一步的方案:所述投料机包括有电机、转盘、螺旋提升杆和两个相同结构的料筒,所述料筒安装于船体的顶部中间位置,料筒的顶部安装有电机,电机的输出端与转轴转动连接,转轴远离电机输出轴的一端安装有转盘,转盘的一侧安装有螺旋提升杆,且转盘与螺旋提升杆转动连接,螺旋提升杆安装于料筒空腔内,从料筒里把饲料提升出后抛撒出,料筒的内部中间位置安装有分隔板,分隔板的两侧可以同时存储颗粒饲料和液体药物,进而扩大了该装置的应用范围;料筒底部与喷洒组件通过管道相连通。
9.作为本实用新型进一步的方案:所述主机包括有直流电压为v的蓄电池、总控开关、飞控结构、两个直流有刷电调、两个直流无刷电机驱动器、电子罗盘、gps和无线接收机,所述直流电压为v的蓄电池通过总控开关与飞控结构相连接,飞控结构分别通过电线与gps、电子罗盘、超声波传感器、无线接收机、指示灯、摇摆舵机、两个直流有刷电调和两个直流无刷电机驱动器相连接。
10.作为本实用新型进一步的方案:所述两个直流有刷电调分别通过连接线控制投料
机中的电机和喷洒组件中的水泵,两个直流无刷电机驱动器分别控制动力轮中的电机。
11.作为本实用新型进一步的方案:所述无线接收机通过数据线与摄像头相连接,遥控器与无线接收机信号连接,遥控器通过蓝牙或数据线与手机相连接。
12.与现有技术相比,本实用新型的有益效果是:
13.本实用新型采用飞控系统结合gps与电子罗盘的数据对无人船的航向与航速进行控制,实现无人船按照设定的作业航线自动行驶,同时控制搭载的投料机和喷洒水泵,实现了水产养殖过程中饲料投喂与药物喷洒的无人作业;无人船动力轮直接采用内置直流无刷电机的波水轮,船体采用泡沫板固定动力轮安装框架,使得无人船易于实施,且结构简单、操控方便,进而有效的降低了制造实施成本、提高工作效率。
14.综上所述,此种基于飞控控制的养殖无人船具有以上有益效果,值得推广。
附图说明
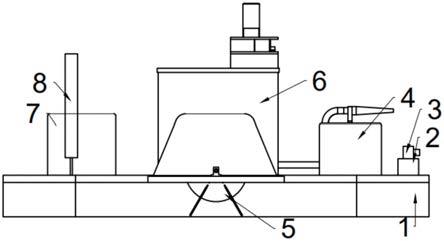
15.图1为本实用新型实施例的正视结构示意图。
16.图2为本实用新型实施例的俯视结构示意图。
17.图中:1-船体,2-超声波传感器,3-摄像头,4-喷洒组件,5-动力轮,6-投料机,7-主机,8-指示灯。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.实施例1
20.请参阅图1~2,本实用新型实施例中,一种基于飞控控制的养殖无人船,包括船体1,所述船体1的顶部一侧安装有主机7,主机7的一侧安装有指示灯8,指示灯8的底端通过支撑柱固定安装于船体1上,船体1的中间位置安装有投料机6,投料机6的两侧通过支撑底座分别安装有动力轮5,动力轮5的外侧通过固定螺栓安装有防护壳,防护壳固定于船体1的顶部;所述投料机6远离主机7的一侧安装有喷洒组件4,喷洒组件4远离投料机6的一侧安装有超声波传感器2,超声波传感器2的顶部与摄像头3转动连接。
21.实施例2
22.请参阅图1-2,本实施例与实施例1的不同之处在于:
23.本实例中,所述喷洒组件4包括有水箱、水泵、摇摆舵机和喷头;所述水箱安装于船体1的顶部靠近投料机6的一侧,水箱通过水输出管道与水泵输入端连接,水泵输出端安装有水输送管道,水输送管道的外端与摇摆舵机相连接,摇摆舵机通过连接座与喷头转动连接。
24.本实例中,所述投料机6包括有电机、转盘、螺旋提升杆和两个相同结构的料筒,所述料筒为矩形结构且安装于船体1的顶部中间位置,料筒的顶部安装有电机,电机的输出端与转轴转动连接,转轴远离电机输出轴的一端安装有转盘,转盘的一侧安装有螺旋提升杆,且转盘与螺旋提升杆转动连接,螺旋提升杆安装于料筒空腔内,从料筒里把饲料提升出后
抛撒出,料筒的内部中间位置安装有分隔板,分隔板的两侧可以同时存储颗粒饲料和液体药物,进而扩大了该装置的应用范围;料筒底部与喷洒组件4通过管道相连通。
25.本实例中,所述主机7包括有直流电压为24v的蓄电池、总控开关、飞控结构、两个直流有刷电调、两个直流无刷电机驱动器、电子罗盘、gps和无线接收机,所述直流电压为24v的蓄电池通过总控开关与飞控结构相连接,飞控结构分别通过电线与gps、电子罗盘、超声波传感器2、无线接收机、指示灯8、摇摆舵机、两个直流有刷电调和两个直流无刷电机驱动器相连接;
26.所述两个直流有刷电调分别通过连接线控制投料机6中的电机和喷洒组件中的水泵,两个直流无刷电机驱动器分别控制动力轮5中的电机。
27.本实例中,所述飞控结构为型号为pixhawk2.4.8的开源飞控。
28.本实施例中,所述无线接收机通过数据线与摄像头3相连接,遥控器与无线接收机信号连接,遥控器通过蓝牙或数据线与手机相连接,通过手机地面站app显示视频或向飞控结构发送航点任务并查看任务执行情况。
29.本实用新型的工作原理是:系统上电程序开始执行,首先判断航行模式是否为自动模式,若不是自动模式则由遥控器手动操作无人船航行、撒料、喷洒作业;若判断航行模式为自动模式,则下一步判断gps是否定位成功:
30.若未定位成功则等待gps定位成功,若定位成功则下一步判断是否已接收航点信息:若未接收航点信息则等待接收航点信息,若已接收航点信息则计算当前航向与目标航向偏差(目标航向:船体当前gps坐标与航点坐标连线的方向,由当前位置指向航点坐标),若偏差大于设定角度参数(本实施例设定为3度)则进行航向修正,若偏差不大于3度则向目标航点航行;
31.航行过程中实时判断与障碍物的距离是否大于距离参数(本实施例设定为2米),若大于2米则继续航行,若不大于2米则进行转向避障,航行过程中优先执行避障操作;其次确保航向偏差不大于设定角度参数,最后通过控制两个动力轮的转速实现无人船按照设定速度航行,航行过程中实时判断当前位置与目标航点的距离是否小于距离参数(本实施例设定为30厘米),若大于30厘米则继续航向,若小于等于30厘米则判断航点是否执行完毕,若航点未执行完毕则向下一航点航行,若执行完毕则停止航行,等待新的操作指令。
32.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。