1.本实用新型涉及一种养殖鱼舱间的鱼转移辅助装置,具体来说,是一种投食诱导小鱼装置。
背景技术:
2.因养殖工船中每个养殖鱼舱的水域容积是固定的,随着养殖鱼舱中养殖的鱼不断生长,导致养殖密度过大,从而造成鱼体死亡,故需及时进行移舱减少鱼群养殖密度。不同养殖鱼舱间可设置移鱼道便于鱼群无损移舱,但受船体结构强度限制,移鱼道不可设置过大,因此养殖鱼自行通过移鱼道移舱效率非常低。
技术实现要素:
3.本实用新型的目的是提供一种投食诱导小鱼装置,可以有效引导鱼群通过移鱼道进入待转移养鱼水舱,高效完成移舱作业。
4.本实用新型采取以下技术方案:
5.一种投食诱导小鱼装置,包括模拟鱼体形状的外壳,所述外壳上设有若干诱鱼灯5,外壳内设有饲料存储仓14,所述饲料存储仓14的出口与外壳上的饲料出料口3连通,所述饲料出料口3具有可控开闭的舱门;所述外壳内还设有可调节投食诱导小鱼装置整体上浮/下降的压载空腔12;所述外壳的尾部设有动力装置和变向装置;所述外壳前部设有摄像头7;所述外壳内设有控制器与无线传输模块11,所述控制器作为所述诱鱼灯5、舱门、动力装置、变向装置、摄像头7的控制中心;所述无线传输模块11与远程控制终端信号连接。
6.对养殖鱼进行移舱作业时,由摄像头实现视觉传感器的功能,从而使投食诱导小鱼装置寻找到移鱼道的入口,动力装置、变向装置控制小鱼装置的整体行进,由投食诱导小鱼装置边投食边诱导养殖鱼进入移鱼道,并在诱鱼灯的辅助下诱导养殖鱼进入待转移养鱼水舱。
7.优选的,所述外壳内部设置鱼体感应雷达4,所述鱼体感应雷达4作为超声波测距装置,可感知诱导小鱼四周设定距离内的鱼;所述控制器也作为所述鱼体感应雷达4的控制中心。
8.优选的,所述动力装置为螺旋桨推进器2。
9.进一步的,所述螺旋桨推进器2采用吊舱式螺旋桨,所述变向装置是支撑所述吊舱式螺旋桨,并可旋转的尾支架1。
10.优选的,模拟鱼体形状的外壳的头部设有充电口6,所述充电口6模拟鱼嘴部位;所述摄像头7设置于模拟鱼嘴部位的上方;所述控制器设置于所述模拟鱼体形状的鱼眼部位。
11.进一步的,所述模拟鱼体形状的外壳的上部设有饲料加注口8,所述饲料加注口8与所述饲料存储仓14连通。
12.优选的,还包括充电装置,所述充电装置包括一总控模块16和若干与其连接的且阵列分布的充电模块17,所述外壳的头部为一平面,若干所述外壳通过其充电口6可阵列排
布的插接在各自对应的充电模块17上,充电口6垂直于所述平面。
13.优选的,所述控制器内置ai芯片。
14.优选的,所述模拟鱼体形状的外壳的背部设有背鳍装置10,侧部和底部设有侧鳍装置9。
15.本实用新型的有益效果在于:
16.1)对养殖鱼进行移舱作业时,由摄像头实现视觉传感器的功能,从而使投食诱导小鱼装置寻找到移鱼道的入口,动力装置、变向装置控制小鱼装置的整体行进,由投食诱导小鱼装置边投食边诱导养殖鱼进入移鱼道,并在诱鱼灯的辅助下诱导养殖鱼进入待转移养鱼水舱;提高养殖鱼转移的效率;
17.2)采用仿生学外形,模仿鱼体形状,通过背鳍、侧鳍使小鱼更好的维持平衡与行进,压载空腔实现小鱼的上浮和下潜,背部设置饲料加注口,腹部尾侧设置出料口,用于小鱼在水中播撒饲料。
18.3)鱼体感应雷达可准确感知周围设定距离内有无鱼,可据此开启诱鱼灯,以及螺旋桨,从而进一步提高养殖鱼转移的效率。
19.4)控制器负责小鱼的投食及诱导等工作,可通过无线通讯模块控制终端实现远程控制终端进行数据传输与协同控制,智能化程度高。
20.5)头部设置摄像头便于采集视频信号,摄像头下方为无线充电口,便于为小鱼充电时使用,设计完善。
21.6)仿鱼式设计,形象美观。
附图说明
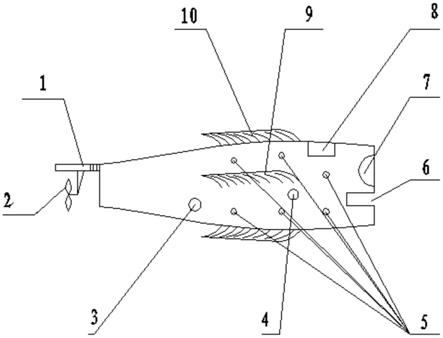
22.图1为本实用新型投食诱导小鱼装置外部示意图
23.图2为本实用新型投食诱导小鱼装置内部示意图
24.图3为充电装置侧视图
25.图4为充电装置俯视图
26.图5为远程控制终端与多个投食诱导小鱼装置协同工作示意图。
27.图中,1.尾支架,2.螺旋桨,3.饲料出料口,4.感应雷达,5.诱鱼灯,6.充电口,7.摄像头,8.饲料加注口,9.侧鳍,10.背鳍,11.无线传输模块,12.压载空腔,13.控制器,14.饲料存储仓,15.充电指示灯,16.总控模块,17.充电模块,18.远程控制终端,19.电池。
具体实施方式
28.下面结合附图和具体实施例对本实用新型进一步说明。
29.参见图1-图5,投食诱导小鱼装置及其充电装置由小鱼装置,附属充电装置,远程控制终端等部分组成。
30.对养殖鱼进行移舱作业时,由小鱼装置边投食边诱导养殖鱼进入移鱼道,并在小鱼装置自身的诱鱼灯,以及移鱼道内诱鱼灯的辅助下诱导养殖鱼进入待转移养鱼水舱。
31.参见图1-图2,小鱼装置:
32.采用仿生学外形,模仿鱼体形状,通过背鳍、侧鳍等提高稳定性和平衡性、通过螺旋桨2和可摆动的尾支架1控制小鱼装置的前进、后退,左转、右转等动作,通过压载空腔12
控制小鱼的上浮、下潜。头部设置摄像头7便于采集视频信号,摄像头7下方为无线充电口6,便于为小鱼充电时使用。背部设置饲料加注8口,腹部尾侧设置饲料出料口3,饲料出料口3具有可控开闭的舱门,舱门的开闭可通过控制器进行自动控制,用于小鱼在水中播撒饲料。鱼体内部设置鱼体感应雷达4,表面设置诱鱼灯5。小鱼装置内置控制器13,负责小鱼的投食及诱导等工作,并通过无线通讯模块11与其他投食诱导小鱼装置协同作用,亦可与远程控制终端进行数据传输与协同控制。
33.参见图3-图4,充电装置:
34.为能更有效地为投食诱导小鱼装置提供电源,且保证诱导小鱼的防水性能,充电装置采用无线充电方式。因投食诱导小鱼装置充电时需要多组一起充电,故充电装置采用模块化方式,便于扩展进行批量充电。
35.参见图5,远程控制终端:
36.通过无线方式与投食诱导小鱼装置进行通讯。将作业任务指令发送给投食诱导小鱼,并实时与多个投食诱导小鱼保持联系,显示并存储投食诱导小鱼传回采集的视频信号。
37.对于本实用新型的工作过程和原理具体说明如下:
38.投食诱导小鱼装置简称诱导小鱼。诱导小鱼由控制器13控制,并通过无线传输模块11,与其他诱导小鱼协同工作,同时将诱导小鱼摄像头7采集的视频信号传送至远程控制终端。
39.外壳内部设置鱼体感应雷达4,所述鱼体感应雷达4作为超声波测距装置,可感知诱导小鱼四周设定距离内的鱼,一旦被诱导的鱼在超声测距的范围之内则使得诱导小鱼自动识别后方的养殖鱼是否跟从,并通过摄像头7寻找识别移鱼道生成引导路径,带领养殖鱼进入移鱼道进行移舱作业。
40.作为优选的方案,在应急模式下,诱导小鱼含ai芯片的控制器可在探测到电量不足等紧急情况时,通过压载空腔12自动寻找返回水面的路径及时上浮便于回收充电,需要说明的是,这一基本原理属于现有技术,可通过控制器轻松实现控制,本文不对该原理进行赘述。
41.作为优选的方案,在遥控模式下,远程控制终端可以给多只诱导小鱼同时发出指令,并可以在终端显示屏上显示各诱导小鱼的位置和状态,并可显示诱导小鱼回传的视频信号,其中产生的数据文件可存储于远程控制终端内。当诱导小鱼采用遥控模式时,远程控制终端仅需发送自由游弋、投食诱导、诱导移舱至某养殖水舱、各诱导小鱼保持的间距、返回水面等指令,诱导小鱼在ai芯片的控制下自行决定行动路径,自主寻找通往目标养殖水舱的移鱼道,根据跟随的鱼群情况自主选择合适的时机打开诱鱼灯带领鱼群进入移鱼道进行移舱作业。
42.参见图3-图4,由于诱导小鱼使用时间集中,传统一鱼一充电器的方式不仅凌乱还不方便管理,故在为人工智能投食诱导小鱼进行充电时,采用批量充电的方式。充电装置由可拼插的充电模块组成,充电模块连接至总控模块,每个充电模块可插入一只人工智能投食诱导小鱼,采用无线充电方式为诱导小鱼充电。总控模块自动根据接入的充电模块及插入的诱导小鱼智能分配合适的充电电流。每个充电模块包含充电指示灯,充电状态、充电完成、待机状态显示不同提示颜色。每个充电模块在未与其他充电模块或总控模块连接时,内部电路断开,保证拼插接口处不导电,防止误触导致触电。
43.以上是本实用新型的优选实施例,本领域普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本实用新型总的构思的前提下,这些变换或改进都应当属于本实用新型要求保护的范围之内。