1.本申请涉及饲喂器领域,特别涉及一种精准控制投饲的饲喂器。
背景技术:
2.在目前市场上,饲喂器的形态存在两种,分别为蛟龙式和关风式,其中“蛟龙式”是最常见的实现方式之一。但是目前在蛟龙齿距设计上都采用等分的方式,控制精度上不够高,导致饲料浪费或者牲畜饲喂量不足。
技术实现要素:
3.本申请提供了一种精准控制投饲的饲喂器,通过蛟龙螺旋扇的间距不等,每个区间内饲料的体积不同,需要填满的时间也依次不相等。由此,减少饲料在运送过程中时间差,让下料更连续,从而使得控制下料精度更准确。
4.本申请提供了一种精准控制投饲的饲喂器,包括:
5.外壳、中心轴以及不等间距的蛟龙螺旋扇;所述中心轴从所述蛟龙螺旋扇的中心贯穿整个所述蛟龙螺旋扇;所述中心轴与所述不等间距的蛟龙螺旋扇都置于所述外壳内部。
6.可选的,所述不等间距的蛟龙螺旋扇,包括:
7.区间1、区间2、区间3以及区间4;所述区间4小于所述区间3;所述区间3小于区间2;所述区间2小于所述区间1。
8.可选的,所述区间1上方设有进料口;所述进料口用于进料。
9.可选的,所述区间4的左下方设有出料口;所述出料口用于出料。
10.可选的,所述出料口设有支撑板,所述支撑板用于所述出料口均匀投饲。
11.本申请提供一种精准控制投饲的饲喂器,包括:外壳、中心轴以及不等间距的蛟龙螺旋扇;所述中心轴从所述蛟龙螺旋扇的中心贯穿整个所述蛟龙螺旋扇;所述中心轴与所述不等间距的蛟龙螺旋扇都置于所述外壳内部。通过蛟龙螺旋扇的间距不等,每个区间内饲料的体积不同,需要填满的时间也依次不相等。由此,减少饲料在运送过程中时间差,让下料更连续,从而使得控制下料精度更准确。
附图说明
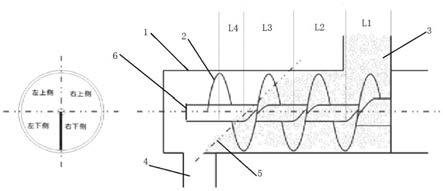
12.图1为本申请中精准控制投饲的饲喂器一个实施例结构示意图;
13.图2为本申请中精准控制投饲的饲喂器中内部非等距设计示意图。
具体实施方式
14.本申请实施例提供了一种精准控制投饲的饲喂器,通过蛟龙螺旋扇的间距不等,每个区间内饲料的体积不同,需要填满的时间也依次不相等。由此,减少饲料在运送过程中时间差,让下料更连续,从而使得控制下料精度更准确。
15.请参阅图1,本申请实施例精准控制投饲的饲喂器一个实施例包括:
16.外壳(1)、中心轴(6)以及不等间距的蛟龙螺旋扇(2);其中不等间距的蛟龙螺旋扇(2)包括:区间1(l1)、区间2(l2)、区间3(l3)以及区间4(l4);区间1(l1)上方设有进料口(3);区间4(l4)的左下方设有出料口(4);出料口(4)设有支撑板(5)。
17.中心轴(6)从蛟龙螺旋扇(2)的中心贯穿整个蛟龙螺旋扇(2);中心轴(6)与不等间距的蛟龙螺旋扇(2)都置于外壳(1)内部;区间4(l4)小于区间3(l3);区间3(l3)小于区间2(l2);区间2(l2)小于区间1(l1);区间1(l1)上方设有进料口(3);进料口(3)用于进料;区间4(l4)的左下方设有出料口(4);出料口(4)用于出料;出料口(4)设有支撑板(5),支撑板(5)用于所述出料口均匀投饲。
18.具体的,由于区间1(l1)直接连接进料口,饲料可以维持填充状态;饲料从进料口(4)进入饲喂器,确保区间1(l1)一直是填满的状态,随着蛟龙螺旋扇(2)不停的转动,饲料从区间1(l1)运动到区间2(l2)、区间3(l3)和区间4(l4),直到饲料从区间4(l4)到出料口(4),最后从出料口(4)掉落。
19.饲料从区间1(l1)到区间2(l2)的时候,饲料在区间2(l2)内的填充顺序为:左下侧、右下侧、右上侧、左上侧;由于区间1(l1)至区间4(l4)不断的变小,所以区间内饲料的体积依次减小,需要填满的时间也依次缩短。从而减少饲料在运送过程中时间差,使得区间1(l1)至区间4(l4)都可以处于被饲料填充满的状态,使得饲料从出料口(4)进行投饲更连续。因此区间2(l2)小于区间1(l1),即填充满区间2(l2)的时间比填充满区间1(l1)的时间更短;所以当饲料从区间1(l1)进入到区间2(l2)的时候,饲料可以填充满区间2(l2);同理,区间3(l3)小于区间2(l2);区间4(l4)小于区间3(l3)。使得饲料进入到区间3(l3)和区间4(l4)的时候也能将区间3(l3)和区间4(l4)填充满饲料;从而提高饲料从出料口(4)进行投饲的连续性。
20.由于饲喂器控制投饲的时候会因为饲料重力和出料口(4)与区间4(l4)连接口的大小会改变的因素,进而导致饲料从出料口(4)出料的时候出现不均匀倾泻现象,从而不能较精准的投饲;所以本申请在出料口(4)增加一个支撑板(5),通过使用支撑板(5)和出料口(4)形成一个预设大小的连接口来将区间4(l4)里的饲料进行出料;在饲料从出料口(4)进行投饲的时候对饲料起到支撑的作用;从而提高饲料在出料口(4)下料均匀度。
21.本申请提供一种精准控制投饲的饲喂器,该饲喂器包括:外壳、中心轴以及不等间距的蛟龙螺旋扇;所述中心轴从所述蛟龙螺旋扇的中心贯穿整个所述蛟龙螺旋扇;所述中心轴与所述不等间距的蛟龙螺旋扇都置于所述外壳内部。通过蛟龙螺旋扇的间距不等,每个区间内饲料的体积不同,需要填满的时间也依次不相等。由此,减少饲料在运送过程中时间差,让下料更连续,从而使得控制下料精度更准确。
22.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
23.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的
普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
24.以上仅为说明本发明的实施方式,并不用于限制本发明,对于本领域的技术人员来说,凡在本发明的精神和原则之内,不经过创造性劳动所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种精准控制投饲的饲喂器,其特征在于,包括:外壳、中心轴以及不等间距的蛟龙螺旋扇;所述中心轴从所述蛟龙螺旋扇的中心贯穿整个所述蛟龙螺旋扇;所述中心轴与所述不等间距的蛟龙螺旋扇都置于所述外壳内部。2.根据权利要求1所述的饲喂器,其特征在于,所述不等间距的蛟龙螺旋扇,包括:区间1、区间2、区间3以及区间4;所述区间4小于所述区间3;所述区间3小于区间2;所述区间2小于所述区间1。3.根据权利要求2所述的饲喂器,其特征在于,所述区间1上方设有进料口;所述进料口用于进料。4.根据权利要求2所述的饲喂器,其特征在于,所述区间4的左下方设有出料口;所述出料口用于出料。5.根据权利要求4所述的饲喂器,其特征在于,所述出料口设有支撑板,所述支撑板用于所述出料口均匀投饲。
技术总结
本申请公开了一种精准控制投饲的饲喂器,其中方法包括:外壳、中心轴以及不等间距的蛟龙螺旋扇;所述中心轴从所述蛟龙螺旋扇的中心贯穿整个所述蛟龙螺旋扇;所述中心轴与所述不等间距的蛟龙螺旋扇都置于所述外壳内部。通过蛟龙螺旋扇的间距不等,每个区间内饲料的体积不同,需要填满的时间也依次不相等。由此,减少饲料在运送过程中时间差,让下料更连续,从而使得控制下料精度更准确。使得控制下料精度更准确。使得控制下料精度更准确。
技术研发人员:向林波 蔡逸群 任威
受保护的技术使用者:广州朗国电子科技股份有限公司
技术研发日:2021.11.05
技术公布日:2022/2/11