1.本发明属于农用机器人技术领域,特别涉及一种葡萄采摘机器人。
背景技术:
2.葡萄是很重要的农业种植物,成熟的葡萄可以用来食用,还可以用于酿制葡萄酒。葡萄通常是种植在葡萄架上,成熟的葡萄都是吊在葡萄架的。
3.传统的方式都是人工采摘,但是悬空生长的葡萄比较高,人工作业劳动强度大、生产效率低,且高处的葡萄难以勾到。
4.现有技术申请号为201620444201.5及201721250308.7的葡萄采摘钳,公开了固定杆和固定镰刀头,固定镰刀头上通过转轴设置有活动刀头,活动刀头的一端底部设置有收拉滑轮,收拉滑轮上方的活动刀头上设置有拉簧固定座,拉簧的另一端与固定镰刀头上的拉簧固定座固定连接,固定杆的底部设置有橡胶手柄,固定镰刀头下方的固定杆上通过固定块设置有收纳网,固定杆的侧壁上设置有拉绳夹紧块,拉绳的一端通过拉绳夹紧块固定在固定杆上,另一端经过收拉滑轮,并在拉绳的这一端设置有拉手。该装置便于人们站在地面上进行剪葡萄的作业,使剪下的葡萄可以掉落到收纳网中,这样可以采摘任意高度的葡萄。
5.但是,葡萄是比容易受损的,这种收纳网只能一次装一串葡萄,否则葡萄掉落时会撞击压坏收纳网中已经采摘的葡萄,这样便需要采摘人员频繁取放收纳网中的葡萄,工作效率提高并不明显。
技术实现要素:
6.本发明针对上述现有技术的存在的问题,提供一种葡萄采摘机器人。
7.本发明通过以下技术手段实现解决上述技术问题的:
8.一种葡萄采摘机器人,包括行走机构、多关节臂和采摘器,所述多关节臂的一端与行走机构相连,另一端与采摘器相连,所述采摘器包括筒状的壳体,壳体由上至下依次具有放卷器、剪断器、上束紧器和下束紧器,所述放卷器能放出的连续的将葡萄罩在内部的包装纸,所述剪断器用于剪断葡萄的藤蔓并同时将包装纸进行切割,所述上束紧器和下束紧器分别对包装纸的上下口扎紧。
9.进一步的,所述放卷器包括空心的圆环,所述圆环朝内侧具有开口用于包装纸放卷进入壳体,所述圆环内固定有开环的环状放卷辊,所述放卷辊上安装有若干个轴承。
10.进一步的,所述剪断器包括刃部一和刃部二,所述刃部一和刃部二的端部分别固定在相啮合的齿轮上。
11.进一步的,所述上束紧器包括具有空腔的环形的料盒一,所述料盒一具有向壳体内侧设置的缺口,所述料盒一的环形空腔内放置了弹性橡胶圈,所述料盒一的缺口处设置有碾轮一,所述碾轮一紧贴缺口,所述碾轮一转动时能带出弹性橡胶圈脱离支撑使其迅速收缩。
12.进一步的,所述下束紧器包括具有空腔的环形的料盒二,所述料盒二具有向壳体内侧设置的缺口,所述料盒二的环形空腔内放置了弹性橡胶圈,所述料盒二的缺口处设置有碾轮二,所述碾轮二紧贴缺口,所述碾轮二转动时能带出弹性橡胶圈脱离支撑使其迅速收缩。
13.进一步的,所述多关节臂的末端还安装有升降臂,所述采摘器安装在升降臂上以实现上下升降。
14.进一步的,所述多关节臂上同时安装了柔性通道,行走机构上安装了料箱,所述柔性通道的上端开口设置在采摘器的下方,下端开口设置在料箱上方,所述料箱内固定了倾斜设置的料网。
15.本发明的有益效果为:本发明通过采摘器实现对葡萄的包装和采摘,并进一步通过柔性通道和料箱进行收集,进而实现可持续性葡萄的采摘,大大提高了采摘的效率,同时保证了采摘葡萄的品质。
附图说明
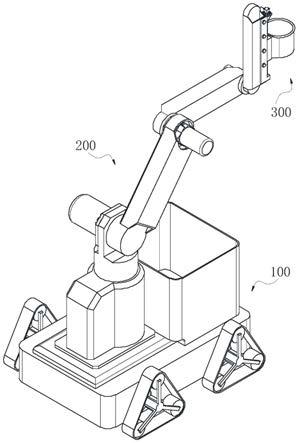
16.图1为葡萄采摘机器人的整体结构示意图;
17.图2为采摘器的整体结构示意图;
18.图3为采摘器的内部结构示意图;
19.图4为放卷辊的结构示意图;
20.图5为放卷器的结构示意图
21.图6为图3中a-a的剖视图;
22.图7为料盒一的结构示意图;
23.图8为升降臂与采摘器的连接结构示意图;
24.图9为多关节臂上柔性通道及料箱的连接结构示意图;
25.图10为料箱的内部结构示意图。
具体实施方式
26.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.实施例
28.如图1所示,为一种葡萄采摘机器人的整体结构示意图,该葡萄采摘机器人包括行走机构100、多关节臂200和采摘器300,多关节臂200的一端与行走机构100相连,另一端与采摘器300相连。
29.如图1中所示,本实施例中的行走机构100和多关节臂200均可以采用现有技术公开的技术手段,以分别实现驱动机器人行走以及控制和保持采摘器300的位置。
30.如图2所示,采摘器300可以实现连续化的葡萄采摘及打包。该采摘器300包括筒状的壳体310,壳体310由上至下依次具有放卷器320、剪断器330、上束紧器340和下束紧器350。放卷器320内放置了连续的包装纸,可以向下放出包装纸将葡萄罩在内部,剪断器330
用于剪断葡萄的藤蔓并同时将包装纸进行切割,上束紧器340和下束紧器350分别对包装纸的上下口扎紧,以使得包装纸将葡萄完全包装在内。
31.如图3~5所示,上述的放卷器320包括空心的圆环321,圆环321朝内侧具有开口用于包装纸放卷进入壳体310,圆环321内固定有开环的环状放卷辊322,环状放卷辊322焊接在圆环321的内腔壁上,该放卷辊322上安装有若干个轴承323以帮助包装纸放卷。将包装纸提前卷绕在放卷辊322上,通过轴承323的滚动,将包装纸放出。对应的,为了便于更换包装纸,该圆环321作为放卷器320的壳体,可以对应设计成分体式,这样便可以打开圆环321进行包装纸的更换。
32.如图5所示,上述包装纸可以通过压轮324驱动放卷,具体的,压轮324紧贴包装纸,压轮324通过电机驱动转动(如图5中箭头方向所示),进而通过压轮324与包装纸之间的摩擦力带动包装纸放卷。压轮324还设置有补偿装置,例如弹簧,采用弹簧(图中未示出)将压轮324及其驱动机构整体压向包装纸,可以对包装纸放卷后的厚度差进行补偿。该压轮324、驱动机构及补偿装置均可以对应安装在保护壳体中。
33.如图6所示,上述的剪断器330包括刃部一331和刃部二332,刃部一331和刃部二332的端部分别固定在相啮合的齿轮上,通过电机(图中未示出)驱动齿轮即可驱动刃部一331和刃部二332相向运动实现剪切效果,从而实现将葡萄的藤蔓及包装纸剪断的作用。对应的剪断器330外部具有保护壳,该保护壳成型在壳体310上,用于容纳、安装及保护刃部一331和刃部二332。
34.如图7所示,该上束紧器340包括具有空腔的环形的料盒一341,料盒一341具有向壳体310内侧设置的缺口,料盒一341的环形空腔内放置了弹性橡胶圈,料盒一341的缺口处设置有碾轮一342,该碾轮一342紧贴缺口,弹性橡胶圈被撑开套在料盒一341中,当碾轮一342转动时,在碾轮一342与壳体310壁接触的缝隙中的弹性橡胶圈会被碾轮一342带出,至缺口处时,失去了支撑的外部环境,弹性橡胶圈向内迅速收缩,将包装纸扎紧。该碾轮一342由齿轮进行驱动,齿轮可通过电机直接进行驱动,如图7所示。为了便于弹性橡胶圈自动进入碾轮一342与壳体310壁接触的缝隙中,料盒一341的内壁具有倾斜角度,以便于弹性橡胶圈滑入。
35.如图2所示,该下束紧器350与上束紧器340的结构一致,包括具有空腔的环形的料盒二351,料盒二351具有向壳体310内侧设置的缺口,料盒二351的环形空腔内放置了弹性橡胶圈,料盒二351的缺口处设置有碾轮二352,碾轮二352紧贴缺口,弹性橡胶圈被撑开套在料盒二351中。
36.如图8所示,该多关节臂200的末端还安装有升降臂400,采摘器300安装在升降臂400上,该升降臂400具有升降座410、丝杆转动机构,采摘器300安装杂升降座410上,升降座410通过丝杆转动机构实现升降,从而能使得采摘器300的壳体310由下向上套住葡萄,并进行后续的采摘操作。
37.如图9和10所示,多关节臂200上同时安装了柔性通道510,例如柔性通道510可以是尼龙布制成,行走机构100上安装了料箱520,该柔性通道510的上端开口设置在采摘器300的下方,下端开口设置在料箱520上方,料箱520固定了倾斜设置的料网530,这样采摘的葡萄被打包好后直接经柔性通道510滑出掉落至料网530上,料网530具有弹性和柔软性,可以很好地保护被包装纸包裹的葡萄。
38.上述葡萄采摘机器人的工作方式为:通过行走机构100驱动该机器人运行至采摘位置,多关节臂200受驱动将采摘器300送至待采摘葡萄的正下方,升降臂400工作将采摘器300提升至罩住葡萄,上束紧器340和下束紧器350同时工作,使弹出弹性橡胶圈将包装纸的上下端扎紧,然后剪断器330手驱动工作同时剪断包装纸和葡萄的藤蔓,被包装纸包装好的葡萄从柔性通道510中滑出进入料箱520被收集,如此便可持续性进行葡萄的采摘,大大提高了采摘的效率,同时保证了采摘葡萄的品质。
39.需要说明的是,在本文中,如若存在第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
40.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。