1.本发明属于农业采摘机械领域,具体涉及一种曳引摇振式坚果收获机。
背景技术:
2.坚果成熟后需要进行采摘来收获熟果,目前较普遍采用的还是人工采摘方式,需要耗费大量人力物力,成本高,效率低,因此急需一种高效的采摘方式。目前已有通过摇树来振落果实的收获机,例如公告号为cn 102656999b的中国专利所公开的振动式果树采收装置。该果树采收装置采用万向节连轴器连接拖拉机的后输出轴,万向节连轴器另一端连接一内球面拉杆,这种驱动方式的传动效率较低,能量损失严重,对大型果树,振动传递损失尤大。且该果树采收装置所附带的配重块,使采收装置整体重量大,需由大马力拖拉机驱动,难以在密植果林和复杂地形作业(如丘陵山地),设备成本和作业成本均较高。
技术实现要素:
3.本发明的目的是提供一种曳引摇振式坚果收获机,来解决背景技术中提出的问题。
4.本发明提供的一种曳引摇振式坚果收获机,由动力车辆驱动,包括摇振机构和绳索曳引装置,其中:
5.摇振机构包括一箱体,使用时箱体安装于动力车辆的变速箱挂接框上;箱体内部署有啮合齿轮、传动齿轮、中间齿轮、调速齿轮、传动轴、中间轴、曲轴、连杆、摇杆;啮合齿轮、传动齿轮均与传动轴传动连接,中间齿轮与中间轴传动连接,调速齿轮与曲轴传动连接;传动齿轮、中间齿轮、调速齿轮顺次啮合连接;曲轴外端与连杆一端转动连接,连杆另一端与摇杆转动连接;
6.绳索曳引装置主要包括曳引绳索,曳引绳索直接或通过连接件与摇杆上安装孔连接;
7.所述啮合齿轮与变速箱挂接框内部齿轮啮合,用来将动力由传动轴传递给传动齿轮,再依次传递给中间齿轮、调速齿轮,调速齿轮带动曲轴,曲轴带动连杆,连杆带动摇杆在竖直平面往复摆动,从而使曳引绳索曳引树枝,进行摇振落果。
8.一些具体实施方式中,动力车辆为手扶拖拉机。
9.考虑到配重块的弊端,采用一种摒弃配重块的优选方案:利用制动系统替换掉配制块来保障作业过程的稳定性,制动系统安装于动力车辆的底部,其包括带尖头稿的制动推杆和控制单元;其中,控制单元用来控制制动推杆下降、停止运动和上升。
10.在一些具体实施方式中,制动推杆为电动推杆或液压推杆。
11.在一些具体实施方式中,制动推杆安装数量为多个。
12.考虑到使用的便捷性,在优选方案中设计了可对摇振机构进行启停的离合机构,即:还包括一外侧带凹槽的啮合套和一离合杆,所述传动轴上设一导向花键段,啮合套套接于导向花键段上,啮合套和啮合齿轮均带匹配的梯形牙形成牙嵌离合器,离合杆的球形端
头与啮合套凹槽滑动连接,当拨动离合杆,离合杆带动啮合套在导向花键段上滑动,使啮合套和啮合齿轮嵌合或分离。
13.在一些具体实施方式中,绳索曳引装置包括索具螺旋扣、第一卸扣、曳引绳索、第二卸扣和柔性绑带,索具螺旋扣上端通过第一卸扣与牵引绳索一端锁紧,曳引绳索另一端通过第二卸扣与柔性绑带锁紧;所述索具螺旋扣通过一u型卸扣与摇杆上安装孔连接。具体应用时,将柔性绑带缠绕于树体,可减轻甚至避免摇振过程对树体造成损伤。
14.在一些具体实施方式中,绳索曳引装置有多个,多个绳索曳引装置与摇杆上同一或不同的安装孔连接。
15.本发明具有如下特点和有益效果:
16.(1)本发明坚果收获机采用动力车辆提供动力,驱动齿轮组传动,带动摇杆往复摆动,一根或多根曳引绳索与摇杆连接,树枝被绳索曳引而产生摇振,使果实从果柄处脱落。本发明极大地提升了动力的传递效率,减少了能量损失,提高了收获效率。
17.(2)采用牵引绳索对树体进行摇振,更为灵活;牵引绳索长度可任意调节,能适应不同高度的果树;绳索曳引装置可调节牵引绳索的松紧程度,从而获得最佳获得摇振效果;可采用多根牵引绳索同时与摇杆连接,实现了一棵果树的多点振摇或多棵果树的同时振摇,提高了大型果树、大型果园的落果效率。
18.(3)优选方案中的制动系统,可稳定动力车辆的车身,避免车身滑动,且使摇振输出的频率和振幅更加平稳。目前采收装置与动力车辆不是固定连接,一般采用配重块使采收装置保持作业过程的平稳,附带配重块的采收装置整体重量一般大于150kg,动力车辆行走时依赖液压升降抬高采收装置,需由功率不小于44kw的动力系统驱动;而本发明摇振装置可与动力车辆通过螺栓固定连接,采用轻便的制动系统即可保障作业过程中的稳定性,由功率大于12kw的动力系统驱动即可。
19.(4)本发明坚果收获机体积小,易操作,机动性优,丘陵山地等特殊地块也能适用,该动力车辆上的摇振机构易于装卸和更换,使该坚果收获机实现一机多用的功能,例如可实现旋耕机、开沟机等功能。
附图说明
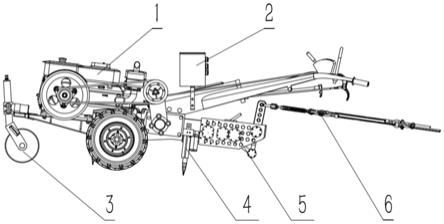
20.图1为具体实施方式收获机的整体图;
21.图2为具体实施方式中制动系统安装位置示意图;
22.图3为图2中位置a和b处制动推杆的安装示意图;
23.图4为具体实施方式中配电箱的外观示意图;
24.图5为具体实施方式中摇振机构俯视角度的内部结构示意图;
25.图6为图5中摇振机构内部结构侧剖图;
26.图7为具体实施方式摇振机构中曲轴和摇杆具体的连接示意图;
27.图8为具体实施方式中摇振机构的离合原理结构示意图;
28.图9为具体实施方式中摇振机构外观的整体示意图;
29.图10为具体实施方式中绳索曳引装置的结构示意图;
30.图11为具体实施方式中绳索曳引装置与摇振机构的安装示意图。
31.图中:1-手扶拖拉机,2-配电箱,3-万向前轮,4-制动推杆,5-摇振机构,6-绳索曳
引装置,7-第一电动推杆,8-第一尖头稿,9-第二电动推杆,10-第二尖头稿,11-第一安装侧板,12-安装底板,13-第二安装侧板,14-下降按钮,15-停止按钮,16-上升按钮,17-啮合齿轮,18-啮合套,19-传动齿轮,20-传动轴,21-中间齿轮,22-中间轴,23-曲轴,24-调速齿轮,25-连杆,26-摇杆,27-宽轴套,28-内部齿轮,29-变速箱挂接框,30-轴承座压盖,31-箱体,32-离合座,33-离合杆,34-第一短轴,35-第一偏心块,36-第二偏心块,37-中间短轴,38-第二短轴,39-长轴,40-插销,41-索具螺旋扣,42-第一卸扣,43-曳引绳索,44-第二卸扣,45-柔性绑带,46-u型卸扣。
具体实施方式
32.下面将结合附图对本发明的具体实施方式做详细说明。显然,所描述的具体实施方式仅仅是本发明的一部分实施例,而不是全部的实施例。基于所描述的具体实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他具体实施方式,都属于本发明保护的范围。
33.本发明曳引摇振式坚果收获机可由任何动力车辆驱动(例如手扶拖拉机),该收获机主要包括摇振机构和绳索曳引装置;摇振机构通过一啮合齿轮与动力车辆变速箱挂接框的内部齿轮啮合,将动力经中间齿轮、调速齿轮传递给一曲轴,由曲轴带动摇杆往复摆动。绳索曳引装置主体为牵引绳索,摇杆带动牵引绳索摆动,实现对果树的摇振作业。
34.为避免摇振过程中手扶拖拉机自身振动过大导致的振幅损失,现有的收获机会带上配重块,但这增大了收获机整体重量,需由大马力驱动,且难以在密植果林和复杂地形作业。因此,在本具体实施方式中提供了一种优选方案,即采用带尖头稿的制动推杆取代配重块。考虑到牵引绳索只有在拉紧状态时,才能达到最佳摇振效果,因此,本具体实施方式中的绳索曳引装置可使牵引绳索保持紧张状态,这样摇振时牵引绳索才能随摇杆大幅摆动。
35.下面将结合图1-11提供本发明的一种具体实施方式,本具体实施方式中采用手扶拖拉机驱动坚果收获机。
36.见图1所示,坚果收获机由手扶拖拉机1驱动,摇振机构5用来将动力传递给绳索曳引装置6。手扶拖拉机1的机头前安装有万向前轮3,机身上安装有制动推杆4和配电箱2,制动推杆4安装于手扶拖拉机1的变速箱挂接框和两后轮之间的底板上,配电箱2用来给制动推杆4和手扶拖拉机1供电。手扶拖拉机1的变速箱挂接框后挂接摇振机构5,绳索曳引装置6连接摇振机构5,由摇振机构5带动作往复运动。本具体实施方式中,手扶拖拉机1为柴油机驱动。
37.参见图2,本具体实施方式中制动系统采用三点制动系统,三点制动系统包括三个制动推杆4,分别见图2中的a、b、c。制动推杆可采用带尖头稿的电动推杆或带尖头稿的液压推杆,本具体实施方式中选择电动推杆。见图3所示,a、b处的制动推杆分别为带第一尖头稿8的第一电动推杆7和带第二尖头稿10的第二电动推杆9。第一电动推杆7和第二电动推杆9顶端分别通过螺栓与第一安装侧板11和第二安装侧板13固定连接,第一安装侧板11和第二安装侧板13分别连接于一安装底板12两端,第一安装侧板11、第二安装侧板13、安装底板12通过螺栓连接于变速箱挂接框上。第一电动推杆7和第二电动推杆9由配电箱2供电,见图4所示,配电箱2的箱体外设有三个控制按钮:下降按钮14、停止按钮15、上升按钮16,分别用来控制三个电动推杆的下降、停止运动和上升。
38.同样的,c处的制动推杆为带第三尖头稿的第三电动推杆(c处的制动推杆与a、b处的制动推杆原理相同,仅部署位置不同,故未在图中标注),第三电动推杆固定于一安装侧板上,该安装侧板安装于手扶拖拉机两后轮之间的底板上,第三电动推杆的运动同样由配电箱上的控制按钮控制。
39.摇振作业时,手扶拖拉机1的机身会产生极大振动,引起振幅损失;在丘陵山地等特殊地段甚至会发生滑动,严重影响作业效率。此时,通过下降按钮14控制制动推杆下降,直至尖头稿插入泥土,从而可稳定机身,避免机身滑动,使摇振输出的频率和振幅更加平稳。
40.参见图5-6,所示为本具体实施方式中摇振机构的内部原理结构示意图。摇振机构主要包括一啮合齿轮17、一传动齿轮19、一中间齿轮21、一调速齿轮24、一传动轴20、一中间轴22、一曲轴23、一连杆25、以及一摇杆26;啮合齿轮17、传动齿轮19均与传动轴20传动连接,传动齿轮19与传动轴20传动连接,中间齿轮21与中间轴22传动连接,调速齿轮24与曲轴23传动连接;传动齿轮19、中间齿轮21、调速齿轮24顺次啮合连接;曲轴23外端与连杆25一端转动连接,连杆25另一端与摇杆26转动连接,曲轴23运动从而带动摇杆26摆动。本具体实施方式中,传动轴20上设有一段导向花键段,位于啮合齿轮17上方之处设于一啮合套18套接于该导向花键段上并可沿导向花键段滑动;传动轴20位于啮合齿轮17下方的轴肩处用平键配合连接传动齿轮19,以使传动齿轮19固定且稳定传动。
41.摇振机构中的啮合齿轮17与手扶拖拉机的变速箱挂接框29上内部齿轮28啮合,见图9所示,啮合齿轮17用来将动力传递到传动连接的传动轴20,传动轴20再将动力传递给传动齿轮19。经传动齿轮19,动力依次被传递到曲轴23上,曲轴23带动连杆25,连杆25带动摇杆26,摇杆26在竖直平面往复摆动。在摇杆26外端设安装孔,绳索曳引装置套于安装孔上,摇杆26摆动即可带动绳索曳引果树产生摇振。本具体实施方式中,在摇杆26上设置4个安装孔,将绳索曳引装置与不同安装孔连接,可使绳索曳引装置中的曳引绳索获得不同摆动幅度,从而适应不同种类坚果的采收。另外,多个安装孔上还可分别套接多个绳索曳引装置,从而实现多点振摇,高效采收。
42.参见图7,所示为摇振机构中曲轴和摇杆具体的连接示意图。从图7可以看出,一带键的第一短轴34与调速齿轮24配合,第一偏心块35和第二偏心块36分别固定连接于中间短轴37两端形成曲轴,第一偏心块35和第二偏心块36分别由第一短轴34和第二短轴38支承,并由一短轴34和第二短轴38带动转动。具体来说,中间短轴37和第二短轴38安装于第一偏心块35和第二偏心块36的安装孔内,中间短轴37、第二短轴38通过过盈连接产生的摩擦阻力或摩擦力矩,可抵抗和传递外载荷。连杆25的第一端与中间短轴37转动连接,其第二端与摇杆26转动连接。具体地,连杆25两端均设圆孔,其第一端圆孔套接于中间短轴37上,第二端圆孔处采用插销40将连杆25和摇杆26的端头连接。插销40外套有滚针轴承;摇杆26与箱体之间通过长轴39连接,长轴两端有宽轴套27限位,防止摇杆摆动过程中左右晃动。
43.摇振机构中还包括用来控制摇振机构启停的离合机构,参见图8所示。啮合齿轮17内圈带梯形牙,其与带匹配梯形牙的啮合套18共同组成牙嵌离合器,离合杆33球状端头嵌入啮合套18的凹槽中共同构成离合机构,离合杆33球状端头可在凹槽内滑动。牙嵌离合器装配于传动轴20上,当牙相互嵌合时,啮合齿轮17可传递运动和转矩,此时摇振机构为启动状态;当牙相互分离时,啮合齿轮17不能传递运动和转矩,此时摇振机构为停止状态。拨动
离合杆33,可带动啮合套18在传动轴20的导向花键段上滑动,以实现牙的分离与结合。图9所示为摇振机构的外观图。摇振机构外壳为箱体结构,零部件部署于箱体31内。图9中所示的变速箱挂接框29为手扶拖拉机自带,摇振机构中的啮合齿轮17变速箱挂接框29上的内部齿轮28啮合。部署于箱体31内部但末端伸出箱体31的轴,其末端均装配有轴承、轴承压环、轴承座、轴承座压盖30。箱体31上与离合杆33对应处安装有离合座32,离合杆33安装于离合座32上。离合杆33用来控制啮合齿轮17和啮合套18的分离与结合,两者分离时,传动齿轮19与传动轴20之间可相对转动,传动齿轮19空转;两者结合时,啮合齿轮17带动啮合套18转动,啮合套18与传动轴20花键配合,带动传动轴20转动。
44.参见图10所示的绳索曳引装置,该绳索曳引装置包括索具螺旋扣41、第一卸扣42、一曳引绳索43、第二卸扣44和柔性绑带45,索具螺旋扣41上端通过第一卸扣42与曳引绳索43一端锁紧,曳引绳索43另一端通过第二卸扣44与柔性绑带45锁紧。使用时,将柔性绑带45缠绕于树枝上,可避免摇振过程中对果树产生勒痕。在本具体实施方式中,索具螺旋扣41采用oo型开式索具螺旋扣;第一卸扣42和第二卸扣44均采用c型卸扣;牵引绳索43采用高强度钢丝绳。
45.图11为具体实施方式中绳索曳引装置与摇振机构的安装示意图。索具螺旋扣41的下端与摇杆26通过一u型卸扣46连接并锁紧,u型卸扣46安装于摇杆26的安装孔上。当u型卸扣46安装于摇杆26的不同安装孔上时,可使牵引绳索43获得不同的摆动幅度,根据实际需要选择。可将多个绳索曳引装置安装于摇杆26的同一或不同安装孔上,可实现多点摇振。摇振前,应前调节索具螺旋扣41的螺纹,从而调节曳引绳索43的松紧程度,使曳引绳索43处于张紧状态,才能获得最佳摇振效果。
46.本具体实施方式中坚果收获机的使用方法如下:
47.将手扶拖拉机1行驶到合适的工作位置,将柔性绑带45缠绕到待摇振的树枝上,对分枝较多的坚果树,可采用多个柔性绑带45分别缠绕多个树枝。柔性绑带45通过第二卸扣44与曳引绳索43连接锁紧。调节索具螺旋扣41拉紧曳引绳索43,按配电箱2上的下降按钮14,将制动推杆4所带尖头稿插入泥土中,以固定机身。调节摇振机构5的离合杆33,启动振摇机构5,摇杆26在竖直平面往复摆动,对绳索43进行曳引,曳引绳索43对果树进行摇振,果实受迫振动从果柄处脱落。
48.本发明振摇机构采用齿轮传递动力,采用曲轴和摇杆提供摇振激励,极大地提升了动力的传递效率,减少了能量损失。本发明使用方便,使用前将振摇机构的箱体通过螺栓连接,即可稳定安装于手扶拖拉机上。在手扶拖拉机上安装制动系统来避免机身晃动,相对采用配重块的方法,具有更良好的机动性,在丘陵山地、矮窄空间等特殊地块也能作业。
49.经田间试验,采用一功率18马力的手扶拖拉机作为驱动,采用本发明曳引摇振式坚果收获机采收板栗,收获一颗板栗树的时间约30s,其中包括安装曳引绳索的时间约20s和振动落果的时间约10秒,收获速度是传统人工采打收获的15~20倍;对大型板栗树的采净率约90%,对小型板栗树的采净率可达100%
50.以上所述仅为本发明的较佳方式,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。