1.本实用新型涉及除草技术领域,尤其涉及一种果园除草机器人。
背景技术:
2.果园内的杂草会和果树争抢肥力,影响果树的生长和结果,因此需要对果园进行除草。果园内难以避免地会存在碎石粒等坚硬物质,在除草过程中,传统除草装置上的刀片很容易与碎石粒进行碰撞,导致刀片受损,刀片的形状结构越复杂,受损后的刀片越难进行维修护理,导致除草机构的除草效果下降,而结构相对简单的刀片往往除草效果也较差,因此需要提出一种易于维护且具有良好除草效果的除草装置。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种果园除草机器人,具有良好的除草效果,且切割刀片方便拆卸维修。
4.技术方案:为实现上述目的,本实用新型的一种果园除草机器人,包括带有驱动轮的车体和两个切割刀片;所述车体内设置有两个竖向转轴,两个竖向转轴沿所述车体的长度方向排列;所述竖向转轴的下端设置有限位环,所述限位环的下方设置有螺纹安装柱;两个所述切割刀片上均设置有安装孔,两个所述切割刀片通过安装孔套接在所述螺纹安装柱上,所述螺纹安装柱上还螺接有紧固螺母,所述紧固螺母与所述限位环对应夹紧固定所述切割刀片。
5.进一步地,所述切割刀片为长条状,两个切割刀片的形状和长度均相同,所述安装孔设置在所述切割刀片的中心处,所述切割刀片的两端分别设置有切割刃口,所述切割刃口的延伸方向与所述切割刀片的长度方向呈一定角度倾斜,所述切割刃口的长度为切割刀片长度的五分之一到四分之一。
6.进一步地,两个所述竖向转轴的中心距小于所述切割刀片的长度,两个竖向转轴的转速和转动方向相同;当其中一个切割刀片转动至与车体的长度方向相平行时,另一个切割刀片与车体的长度方向相垂直。
7.进一步地,所述车体上设置有驱动电机,所述驱动电机的输出轴上设置有传动齿轮,两个所述竖向转轴的上端均设置有受动齿轮,两个竖向转轴上的受动齿轮的齿数相同;所述传动齿轮同时与两个受动齿轮啮合传动。
8.进一步地,所述限位环的下表面设置有定位柱,所述切割刀片上设置有与所述定位柱对应插接的定位孔。
9.进一步地,所述车体的下方设置有保护罩壳,所述保护罩壳对应罩设两个切割刀片。
10.进一步地,所述保护罩壳上靠近所述车体后端的一侧设置有草料出口。
11.有益效果:本实用新型的一种果园除草机器人,其有益效果如下:
12.1)切割刀片通过紧固螺母、限位环和螺纹安装柱安装在竖向转轴的下方,方便拆
卸维修;
13.2)切割刀片设置有两个,两个切割刀片工作互补,提高除草效果;
14.3)两个竖向转轴的中心距小于切割刀片的长度,两个竖向转轴的转速和转动方向相同,当其中一个切割刀片转动至与车体的长度方向相平行时,另一个切割刀片与车体的长度方向相垂直,从而使得两个切割刀片的切割区域可以部分重叠,进而减小了两个切割刀片所占据的空间,结构更加合理。
附图说明
15.附图1为车体的俯视图;
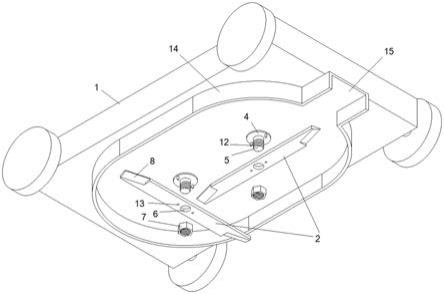
16.附图2为车体的仰视图;
17.附图3为切割刀片的安装示意图;
18.附图4为驱动电机和竖向转轴的传动示意图。
具体实施方式
19.下面结合附图对本实用新型作更进一步的说明。
20.如附图1至4所述的一种果园除草机器人,包括带有驱动轮的车体1和两个切割刀片2。车体1内设置有带动驱动轮转动的电机。所述车体1内设置有两个竖向转轴3,竖向转轴3在驱动机构的带动下水平转动。两个竖向转轴3沿所述车体1的长度方向排列,使两个竖向转轴3下方安装的切割刀片2也沿车体1的长度方向排列。
21.所述竖向转轴3的下端设置有限位环4,所述限位环4的下方设置有螺纹安装柱5。两个所述切割刀片2上均设置有安装孔6,两个所述切割刀片2通过安装孔6套接在所述螺纹安装柱5上,所述螺纹安装柱5上还螺接有紧固螺母7,所述紧固螺母7与所述限位环4对应夹紧固定所述切割刀片2。切割刀片2的安装方式使得切割刀片2方便拆卸维修。
22.所述切割刀片2为长条状,两个切割刀片2的形状和长度均相同。所述安装孔6设置在所述切割刀片2的中心处,所述切割刀片2的两端分别设置有切割刃口8,所述切割刃口8的延伸方向与所述切割刀片2的长度方向呈一定角度倾斜。在车体1行进的过程中切割刀片2水平转动,斜向的切割刃口8的切割效果更好。所述切割刃口8的长度为切割刀片2长度的五分之一到四分之一,切割刀口2更加不易受损,使用寿命更长,也更加容易维护。若在切割刀片2的中间设置切割刃口8,中间的切割刃口8的工作效率也很低下。由于切割刃口8的长度设置,单个长条状切割刀片2的除草效果欠佳,处于车体前端的切割刀片2在工作时可能会漏掉部分杂草,因此设置有两个切割刀片2,处于车体后方的切割刀片2可以进行第二次除草,解决掉被漏掉的杂草,从而提高本实用新型的除草效果。
23.如附图2中所示,两个所述竖向转轴3的中心距小于所述切割刀片2的长度,两个竖向转轴3的转速和转动方向相同。当其中一个切割刀片2转动至与车体1的长度方向相平行时,另一个切割刀片2与车体1的长度方向相垂直。从而使得两个切割刀片2的切割区域可以部分重叠,进而减少了两个切割刀片2所占据的车体空间,结构设置更加合理。
24.所述车体1上设置有驱动电机9,所述驱动电机9的输出轴上设置有传动齿轮10,两个所述竖向转轴3的上端均设置有受动齿轮11,两个竖向转轴3上的受动齿轮11的齿数相同,所述传动齿轮10同时与两个受动齿轮11啮合传动,驱动电机9可以同时带动两个竖向转
轴3转动,结构更加精简,同时也确保了两个竖向转轴的3转动方向和转动速度相同。
25.所述限位环4的下表面设置有定位柱12,所述切割刀片2上设置有与所述定位柱 12对应插接的定位孔13,确保切割刀片2不会与竖向转轴相对转动。
26.所述车体1的下方设置有保护罩壳14,所述保护罩壳14对应罩设两个切割刀片2,提高切割刀片2的安全性。
27.所述保护罩壳14上靠近所述车体1后端的一侧设置有草料出口15,更方便切割后的杂草离开保护罩壳14内。
28.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种果园除草机器人,其特征在于:包括带有驱动轮的车体(1)和两个切割刀片(2);所述车体(1)内设置有两个竖向转轴(3),两个竖向转轴(3)沿所述车体(1)的长度方向排列;所述竖向转轴(3)的下端设置有限位环(4),所述限位环(4)的下方设置有螺纹安装柱(5);两个所述切割刀片(2)上均设置有安装孔(6),两个所述切割刀片(2)通过安装孔(6)套接在所述螺纹安装柱(5)上,所述螺纹安装柱(5)上还螺接有紧固螺母(7),所述紧固螺母(7)与所述限位环(4)对应夹紧固定所述切割刀片(2)。2.根据权利要求1所述的一种果园除草机器人,其特征在于:所述切割刀片(2)为长条状,两个切割刀片(2)的形状和长度均相同,所述安装孔(6)设置在所述切割刀片(2)的中心处,所述切割刀片(2)的两端分别设置有切割刃口(8),所述切割刃口(8)的延伸方向与所述切割刀片(2)的长度方向呈一定角度倾斜,所述切割刃口(8)的长度为切割刀片(2)长度的五分之一到四分之一。3.根据权利要求2所述的一种果园除草机器人,其特征在于:两个所述竖向转轴(3)的中心距小于所述切割刀片(2)的长度,两个竖向转轴(3)的转速和转动方向相同;当其中一个切割刀片(2)转动至与车体(1)的长度方向相平行时,另一个切割刀片(2)与车体(1)的长度方向相垂直。4.根据权利要求3所述的一种果园除草机器人,其特征在于:所述车体(1)上设置有驱动电机(9),所述驱动电机(9)的输出轴上设置有传动齿轮(10),两个所述竖向转轴(3)的上端均设置有受动齿轮(11),两个竖向转轴(3)上的受动齿轮(11)的齿数相同;所述传动齿轮(10)同时与两个受动齿轮(11)啮合传动。5.根据权利要求4所述的一种果园除草机器人,其特征在于:所述限位环(4)的下表面设置有定位柱(12),所述切割刀片(2)上设置有与所述定位柱(12)对应插接的定位孔(13)。6.根据权利要求5所述的一种果园除草机器人,其特征在于:所述车体(1)的下方设置有保护罩壳(14),所述保护罩壳(14)对应罩设两个切割刀片(2)。7.根据权利要求6所述的一种果园除草机器人,其特征在于:所述保护罩壳(14)上靠近所述车体(1)后端的一侧设置有草料出口(15)。
技术总结
本实用新型公开了一种果园除草机器人,包括带有驱动轮的车体和两个切割刀片;车体内设置有两个竖向转轴,两个竖向转轴沿车体的长度方向排列;竖向转轴的下端设置有限位环,限位环的下方设置有螺纹安装柱;两个切割刀片上均设置有安装孔,两个切割刀片通过安装孔套接在螺纹安装柱上,螺纹安装柱上还螺接有紧固螺母,紧固螺母与限位环对应夹紧固定切割刀片;切割刀片为长条状,两个竖向转轴的中心距小于切割刀片的长度,两个竖向转轴的转速和转动方向相同;当其中一个切割刀片转动至与车体的长度方向相平行时,另一个切割刀片与车体的长度方向相垂直。本实用新型具有良好的除草效果,且切割刀片方便拆卸维修。且切割刀片方便拆卸维修。且切割刀片方便拆卸维修。
技术研发人员:赵梓芬 田军委 于鑫培 王洛 张召召 苏宇
受保护的技术使用者:西安工业大学
技术研发日:2021.09.10
技术公布日:2022/1/14