1.本实用新型涉及一种凤梨去皮装置。
背景技术:
2.凤梨(学名:ananascomosus (linn.) merr.),俗称菠萝,属热带水果之一。味美甘甜,深受人们喜爱。而凤梨含有一种叫“凤梨朊酶”的物质,它能分解蛋白质,溶解阻塞于组织中的纤维蛋白和血凝块,改善局部的血液循环,消除炎症和水肿。
3.然而,凤梨在食用时,需将凤梨削皮。通常凤梨去皮的方法是人工削皮,抓持困难,切削不方便,效率低,易受伤。
技术实现要素:
4.本实用新型的目的是针对现有技术缺陷,提供一种凤梨去皮装置。
5.为了实现上述本实用新型的目的,采取如下技术方案:
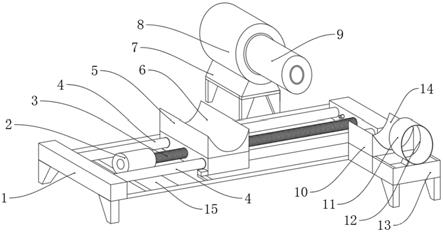
6.一种凤梨去皮装置,包括支撑架、丝杠驱动机、丝杠、导杆、滑块、带有伸缩杆的伸缩驱动件与端部设有果皮切割刀的果皮切刀筒;所述支撑架的顶部并行安装有导杆、丝杠;所述丝杠驱动机安装于支撑架的一端,所述丝杠的一端与丝杠驱动机传动连接,该丝杠的另一端与支撑架的另一端转动连接;所述滑块的一端与导杆滑动连接,其另一端与丝杠螺纹连接;所述伸缩驱动件安装于支撑架的一侧;所述果皮切刀筒相应于伸缩驱动件安装于支撑架的另一侧;其中,所述伸缩杆对应于果皮切刀筒伸缩移动。
7.作为技术方案的进一步改进,本实用新型凤梨去皮装置还包括端部切割部;所述端部切割部架设于支撑架,用于切割凤梨的根部与头部。
8.作为技术方案的进一步改进,所述端部切割部包括切刀、推杆、支撑板、支架、升降驱动机与切割支架;所述切割支架架设于支撑架的顶部;所述支架安装于切割支架的顶部;所述升降驱动机的一端安装于支架,其另一端与支撑板传动连接;所述支撑板的两端各安装有至少一根推杆;各端上的推杆贯穿切割支架的顶部与相应的切刀连接。
9.作为技术方案的进一步改进,本实用新型凤梨去皮装置还包括导孔;所述切割支架的顶部上相应于推杆的位置开设有导孔。
10.作为技术方案的进一步改进,本实用新型凤梨去皮装置还包括第一定位传感器、第二定位传感器与控制器;所述第一定位传感器靠近丝杠驱动机安装于支撑架;所述第二定位传感器靠近伸缩驱动件安装于支撑架的一端;所述控制器安装于支撑架的一端;其中,所述控制器与丝杠驱动机、伸缩驱动件、第一定位传感器、第二定位传感器电连接。作为本领域的公知常识,本方案使用的控制器及其与之相连的各装置的动作控制属于成熟的单片机技术,可以轻易的从市场上购买得到,经简单调试后即可使用。
11.作为技术方案的进一步改进,本实用新型凤梨去皮装置还包括沉孔;所述支撑架的一端开设有沉孔;所述第二定位传感器安装于沉孔内。
12.作为技术方案的进一步改进,所述第二定位传感器包括弹簧、触杆与触感器;所述
触感器设置于沉孔的底部;所述弹簧套于触杆的一端,所述触杆的一端插入沉孔内,且与触感器有间距,所述触杆的另一端延伸出沉孔,且延伸出的长度与所述间距相等;其中,所述弹簧上靠近触感器的一端与沉孔连接,其另一端与触杆连接。
13.作为技术方案的进一步改进,本实用新型凤梨去皮装置还包括视觉定位传感器;所述视觉定位传感器安装于端部切割部上远离丝杠驱动机的一侧,且与控制器电连接。
14.作为技术方案的进一步改进,本实用新型凤梨去皮装置还包括弧形槽;所述滑块的顶部设有弧形槽。
15.作为技术方案的进一步改进,本实用新型凤梨去皮装置还包括导向托件;所述果皮切刀筒与支撑架之间安装有导向托件;所述导向托件的顶部呈弧形槽结构。
16.本实用新型相对于现有技术所具有的进步:
17.1. 本实用新型能有效去除凤梨的果皮,滑块上放置凤梨,丝杠带动滑块滑至伸缩驱动机与果皮切刀筒之间,伸缩驱动件上的伸缩杆推动滑块上的凤梨向果皮切刀筒移动,果皮切刀筒上的果皮切割刀插入凤梨内,果皮切割刀将凤梨果皮及果肉分离,凤梨果肉进入果皮切刀筒内,凤梨果皮滞留于果皮切刀筒外,完成凤梨果皮去除工作。
18.2.本实用新型设有端部切割部,端部切割部便于将凤梨的两端取出,省去人工切割凤梨端部的工作量,降低人工劳动量。
19.3.本实用新型设有第一定位传感器、第二定位传感器与控制器,第一定位传感器、第二定位传感器与控制器配合使用,能便于将滑块进行定位;而控制器与伸缩驱动件、丝杠驱动机电连接,控制器能对伸缩驱动件、丝杠驱动机的工作进行调控;从而能便于实现滑块自动定位及自动去除凤梨果皮。
附图说明
20.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
21.图1为本实用新型一种凤梨去皮装置的结构示意图;
22.图2为本实用新型增加安装有端部切割部的结构示意图;
23.图3为本实用新型中滑块移至端部切割部的结构示意图;
24.图4为本实用新型中端部切割部移至与伸缩推动件、果皮切刀筒对齐的结构示意图;
25.图5为本实用新型中端部切割部的结构示意图;
26.图6为本实用新型中第二定位传感器安装于支撑架一端部的结构示意图;
27.图7为本实用新型中第二定位传感器的展开式结构示意图;
28.图中各部件名称及序号:1-支撑架,2-丝杠驱动机,3-丝杠,4-导杆,5-滑块,6-弧形槽,7-驱动支架,8-伸缩驱动件,9-伸缩杆,10-导向托件,11-果皮切刀筒,12-果皮切割刀,13-刀架,14-弧形托板,15-丝杠支架,16-控制器,17-第一定位传感器,18-传感器支架,19-视觉定位传感器,20-端部切割部,201-切刀,202-导孔,203-推杆,204-支撑板,205-支架,206-升降驱动机,207-切割支架,21-第二定位传感器,211-沉孔,212-弹簧,213-触杆,
214-触感器。
具体实施方式
29.为了使本技术领域的人员更好的理解本技术中的技术方案,下面将结合附图和实施例来对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
30.实施例1:
31.如图1至7所示,一种凤梨去皮装置,包括支撑架1、丝杠驱动机2、丝杠3、导杆4、滑块5、带有伸缩杆9的伸缩驱动件8与端部设有果皮切割刀12的果皮切刀筒11;所述支撑架1的顶部并行安装有导杆4、丝杠3;所述丝杠驱动机2安装于支撑架1的一端,所述丝杠3的一端与丝杠驱动机2传动连接,该丝杠3的另一端与支撑架1的另一端转动连接;所述滑块5的一端与导杆4滑动连接,其另一端与丝杠3螺纹连接;所述伸缩驱动件8安装于支撑架1的一侧;所述果皮切刀筒11相应于伸缩驱动件8安装于支撑架1的另一侧;其中,所述伸缩杆9对应于果皮切刀筒11伸缩移动。
32.果皮切割刀12呈圆锥筒状,其小径一端朝向伸缩驱动件,其大径一端设置于果皮切刀筒11。切割凤梨果皮时,圆锥筒状的果皮切割刀将切割出的果皮向外撑开,便于切割出的果皮脱离果皮切刀筒。
33.伸缩驱动件8可采用液压缸或气压缸。
34.工作方式:
35.滑块5的初始位置是靠近于丝杠驱动机2,远离伸缩驱动件8。
36.将去除两端的凤梨放置于滑块5,启动丝杠驱动机2,丝杠驱动机2驱动丝杠3转动,丝杠3推动滑块5沿导杆4向伸缩驱动件8与果皮切刀筒11滑动,当滑块5滑动至伸缩驱动件8与果皮切刀筒11时,暂停丝杠驱动机2,此时,滑块5的一端与伸缩驱动件8上的伸缩杆9对应,滑块5的另一端与果皮切刀筒11对应,驱动伸缩驱动件8,伸缩驱动件8驱动伸缩杆9向果皮切刀筒11伸长的同时,推动滑块5上的凤梨向果皮切刀筒11滑动,果皮切刀筒11上的果皮切割刀12从凤梨端面插入凤梨内,随着伸缩杆11将凤梨向果皮切刀筒11推动,果皮切割刀12切割凤梨上的果皮,将果皮与凤梨果肉分离,当凤梨完全进入果皮切刀筒11时,即可完成凤梨去皮工作。
37.伸缩驱动件8上设定伸缩杆9的伸长行程,该伸长行程内,伸缩杆9将凤梨完全推入果皮切刀筒11内,并将凤梨果肉从果皮切刀筒内推出,完成凤梨去皮工作;伸缩杆9完成设定的伸长行程后,自动收缩复位。
38.本实用新型能有效去除凤梨的果皮,滑块上放置凤梨,丝杠带动滑块滑至伸缩驱动机与果皮切刀筒之间,伸缩驱动件上的伸缩杆推动滑块上的凤梨向果皮切刀筒移动,果皮切刀筒上的果皮切割刀插入凤梨内,果皮切割刀将凤梨果皮及果肉分离,凤梨果肉进入果皮切刀筒内,凤梨果皮滞留于果皮切刀筒外,完成凤梨果皮去除工作。
39.实施例2:
40.与实施例1相比,区别之处在于:为了便于切割凤梨的两端,增加安装端部切割部20。
41.如图1-5所示,所述端部切割部20架设于支撑架1,用于切割凤梨的根部与头部。
42.工作方式:
43.将凤梨放置于滑块5,丝杠驱动机2驱动丝杠3转动,滑块5在丝杠及导杆4作用下向端部切割部20滑动,当滑块5滑动至端部切割部20时,利于端部切割部20切割凤梨的两端,从而能为凤梨去皮提供便利。
44.实施例3:
45.与实施例2相比,区别之处在于:给出了端部切割部的一种结构形式。
46.如图5所示,所述端部切割部20包括切刀201、推杆203、支撑板204、支架205、升降驱动机206与切割支架207;所述切割支架207架设于支撑架1的顶部;所述支架205安装于切割支架207的顶部;所述升降驱动机206的一端安装于支架205,其另一端与支撑板204传动连接;所述支撑板204的两端各安装有至少一根推杆203;各端上的推杆203贯穿切割支架207的顶部与相应的切刀201连接。
47.工作方式:
48.切割凤梨两端时,升降驱动机206启动,驱动支撑板204向下移动,支撑板204带动推杆203下移,推杆203带动切刀201朝凤梨的相应端部下移,并将凤梨的端部切割。切割端部后的凤梨在切割处呈露出果肉横截端面,伸缩驱动件驱动伸缩杆向果皮切刀筒伸长的同时,伸缩杆将滑块上切割端部后的凤梨推向果皮切刀筒,果皮切刀筒从果肉横截端面的圆周边缘插入凤梨内,实现凤梨的果皮与果肉分离,实现凤梨去皮。
49.实施例4:
50.与实施例3相比,区别之处在于:为了便于对推杆实现导向,增加安装有导孔202。
51.如图5所示,所述切割支架207的顶部上相应于推杆203的位置开设有导孔202。
52.推杆203插入导孔202内,并能相对于导孔202实现滑动。导孔202能对推杆203实现定向滑动限制。
53.实施例5:
54.与实施例1-4任一相比,区别之处在于:为了便于实现滑块自动定位,增加安装有第一定位传感器17、第二定位传感器21与控制器16。
55.如图2所示,所述第一定位传感器17靠近丝杠驱动机2安装于支撑架1;所述第二定位传感器21靠近伸缩驱动件8安装于支撑架1的一端;所述控制器16安装于支撑架1的一端;其中,所述控制器16与丝杠驱动机2、伸缩驱动件8、第一定位传感器17、第二定位传感器21电连接。
56.工作方式:
57.丝杠驱动机2驱动丝杠3转动,丝杠3与滑块5螺纹连接,丝杠3为滑块5提供动力,导杆4与滑块5滑动连接,丝杠3驱动滑块5在支撑架1的顶部实现往复移动。
58.滑块5向丝杠驱动机2滑动:丝杠驱动机2驱动丝杠3转动,在导杆4导向滑动作用下,丝杠3带动滑块5向丝杠驱动机2滑动,当滑块5触碰第一定位传感器17时,第一定位传感器17向控制器16发送信号,控制器16根据该信号控制丝杠驱动机2暂停工作,丝杠3停止转动,滑块5停止滑动,此时,即可向滑块5上放置需要去皮的凤梨。
59.滑块5向端部切割部20滑动:丝杠驱动机2驱动丝杠3反向转动,丝杠3推动滑块5沿导杆4向端部切割部20滑动,当滑块5滑至与端部切割部20对齐后,通过控制器16控制丝杠
驱动机2暂停工作,丝杠3暂停转动,滑块5停止滑动;同时通过控制器16控制端部切割部20工作,端部切割部20切割滑块5上的凤梨两端,端部切割部20切割完成后,利用控制器16启动丝杠驱动机2,丝杠驱动机2驱动丝杠3转动,丝杠3推动滑块5沿导杆4向第二定位传感器21滑动。
60.滑块5向第二定位传感器21滑动:丝杠驱动机2驱动丝杠3反向转动,丝杠3推动滑块5沿导杆4向第二定位传感器21滑动,滑块5带着凤梨向伸缩驱动件8及果皮切刀筒11滑动;当滑块5触碰第二定位传感器21时,第二定位传感器21向控制器16发送信号,控制器16根据该信号控制丝杠驱动机2暂停工作、伸缩驱动件8工作;伸缩驱动件8驱动伸缩杆9向果皮切刀筒11伸长的同时,伸缩杆9将滑块5上的凤梨推向果皮切刀筒,且将凤梨推入果皮切刀筒11内,果皮切割筒11上的果皮切割刀12从凤梨的端部插入凤梨内,实现凤梨果肉与果皮分离;伸缩杆9在设定伸长行程内将凤梨从果皮切刀筒11推出,实现果皮与果肉完全分离,伸缩杆9伸长至设定伸长行程后,伸缩驱动件8带动伸缩杆9自动收缩复位。
61.控制器16上设定滑块5于第一定位传感器17、第二定位传感器21处停留的时间,可设定的停留时间为5~15秒,该时间内,伸缩驱动件8对凤梨已完成去皮工作,且伸缩杆9也复位;停留时间到设定值后,控制器16控制丝杠驱动机2带动丝杠3转动,丝杠3带动滑块5沿导杆4向第一定位传感器17滑动,滑块5滑动至第一定位传感器17,再向滑块5上放置凤梨,丝杠驱动机2驱动丝杠3,丝杠3带动滑块5滑至第二定位传感器21,伸缩驱动件8驱动伸缩杆9伸长,并将滑块5上的凤梨推入果皮切刀筒11,以此重复循环操作,实现凤梨持续去皮工作。
62.实施例6:
63.与实施例5相比,区别之处在于:给出了第二定位传感器于支撑架上的一种安装结构形式。
64.如图6和7所示,所述支撑架1的一端开设有沉孔211;所述第二定位传感器21安装于沉孔211内。
65.实施例7:
66.与实施例6相比,区别之处在于:给出了第二定位传感器的一种结构形式。
67.如图7所示,所述第二定位传感器21包括弹簧212、触杆213与触感器214;所述触感器214设置于沉孔211的底部;所述弹簧212套于触杆213的一端,所述触杆213的一端插入沉孔211内,且与触感器214有间距,所述触杆213的另一端延伸出沉孔211,且延伸出的长度与所述间距相等;其中,所述弹簧212上靠近触感器214的一端与沉孔211连接,其另一端与触杆213连接。
68.工作方式:
69.滑块5推动触杆213向沉孔211内滑动,弹簧212收到触杆213挤压发生弹性变形,滑块5挤压触杆213触碰至触感器214,触感器214则向控制器16发送信号,控制器16根据该信号控制丝杠驱动机2暂停工作的同时,控制伸缩驱动件8工作,伸缩驱动件8驱动伸缩杆9向果皮切刀筒11伸长。
70.凤梨完成去皮后,丝杠3带动滑块向丝杠驱动机2滑动,弹簧213的弹性变形作用力推动触杆213向沉孔211外延伸复位。
71.实施例8:
72.与实施例5-7任一相比,区别之处在于:为了便于将滑块定位于端部切割部,便于端部切割部将滑块上的凤梨切割两端。
73.如图2所示,所述视觉定位传感器19安装于端部切割部20上远离丝杠驱动机2的一侧,且与控制器16电连接。
74.视觉定位传感器19用于监测滑块5与端部切割部20之间的定位。便于滑块5停留端部切割部20处,从而便于端部切割部20切割滑块5上的凤梨两端。即为,丝杠3推动滑块5沿导杆4向端部切割部20滑动,视觉定位传感器19监测到滑块5滑动至滑块5与端部切割部20之间的定位处时,即刻向控制器16发送信号,控制器16根据该信号控制丝杠驱动机2暂停工作,滑块5停留,同时,控制器16控制端部切割部20工作,端部切割部20切割滑块5上的凤梨两端。
75.为了便于端部切割部切割凤梨两端,控制器16上设定滑块5停留于端部切割部20的时间,该时间可设定为2~4秒。
76.实施例9:
77.与实施例1-8任一相比,区别之处在于:为了便于防止凤梨于滑块顶部滚动,增加安装有弧形槽6。
78.如图1和2所示,所述滑块5的顶部设有弧形槽6。弧形槽6用于放置凤梨,并能限制凤梨滚动。从而能防止滑块在移动过程中凤梨脱离滑块。
79.实施例10:
80.与实施例1-9任一相比,区别之处在于:为了避免果皮堆积于支撑架顶部,增加有导向托件10。
81.如图1-4所示,所述果皮切刀筒11与支撑架1之间安装有导向托件10;所述导向托件10的顶部呈弧形槽结构。该弧形槽结构便于将凤梨导向果皮切刀筒。
82.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之内。