1.本实用新型涉及一种振动棒,具体为一种内置转速传感器混凝土振动棒及监视系统。
背景技术:
2.现有的滑模摊铺机多采用内置混凝土振动棒进行混凝土振动密实,这类内置混凝土振动棒常用液压马达或电动机进行棒头内偏心块的旋转驱动,分别为液压振动棒和电振动棒。
3.滑模摊铺机当用于摊铺路缘石、水沟、防护墙等混凝土构筑物时,混凝土的塌落度与构筑物的截面尺寸有关,构筑物越高,混凝土的塌落度就越小,振动棒的转速就要越大。当前大多数滑模摊铺机不具有振动棒监视系统,振动棒的实际工作转速无法显示,只能根据控制振动棒转速的旋钮位置以及摊铺效果进行判断,影响了滑模摊铺机的摊铺质量。
技术实现要素:
4.本实用新型的目的是提供一种内置转速传感器的混凝土振动棒以及监视系统,监视系统用于滑模摊铺机在施工时对一根或多根振动棒的工作转速和液压马达的流量实时监视,能够对振动棒的状态进行判断,有利于提高摊铺质量和效率。
5.实现上述目的的技术方案是:内置转速传感器混凝土振动棒及监视系统,包括振动棒,振动棒包括驱动器、振动头壳体、以及偏心转子,所述偏心转子安装在振动头壳体内,所述驱动器用于驱动偏心转子转动,其特征在于:所述监视系统还包括显示屏及用于驱动器转速检测的速度传感器,所述速度传感器通过控制器连接显示屏。
6.进一步地,所述驱动器采用液压马达或电动马达,速度传感器安装在驱动器的壳体上。
7.进一步地,所述驱动器内的驱动轴采用铁磁性材质,驱动轴的尾端偏心设置有槽口,所述速度传感器采用磁电传感器、并且检测端与驱动轴端部的槽口对应配合。
8.进一步地,所述驱动器壳体内的驱动轴上安装有齿轮,所述速度传感器采用磁电传感器、并且检测端正对驱动轴上齿轮边缘的轮齿。
9.进一步地,所述速度传感器采用加速度传感器。
10.进一步地,液压马达的进油管路上安装有流量传感器,流量传感器通过控制器连接显示屏。
11.进一步地,振动棒设置有若干个,振动棒上安装的速度传感器、流量传感器通过控制器连接显示屏。
12.本实用新型的有益效果:
13.工作时,把内置转速传感器混凝土振动棒的振动头插入到需要密实的混凝土内部,启动工作油源,振动棒的驱动器带动偏心转子旋转,偏心转子转动使与其相连的振动头产生振动力,从而密实周边的混凝土。
14.驱动器在工作时,其驱动轴连续运转,被磁电传感器感应输出感应信号,或者驱动器带动偏心转子产生的振动被加速度传感器感应输出感应信号,与振动棒转速成比例的感应信号上传到控制器,经过控制器的处理后,传输到显示屏进行显示。
15.本实用新型的进、出油管上还分别安装有流量传感器,其采集的信号通过控制器处理后,再传输至显示屏实时显示流量值。
附图说明
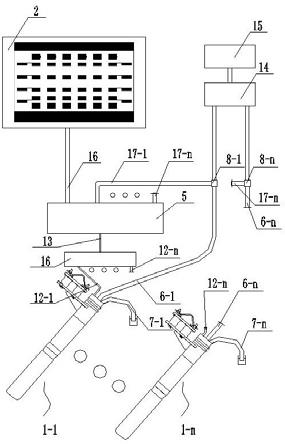
16.图1为本实用新型的结构示意图;
17.图2为第一实施例的局部示意图;
18.图3为第二实施例中液压马达的局部结构示意图;
19.图4为第三实施例中液压马达的局部结构示意图。
具体实施方式
20.第一实施例
21.如图1、2所示,本实用新型包括振动棒1、显示屏2,振动棒1采用但不限于专利号201320630749.5公开的内置液压混凝土振动棒,振动棒1包括液压马达3,液压马达3的尾端设置有进油口和出油口,进油口对应连接有进油管6,进油管6的进油口通过阀块14连接液压油源15,出油口对应连接有出油管7,液压马达3的前端设置有与偏心转子连接的驱动轴。
22.液压马达3的壳体上安装有加速度传感器4.1,进油管6上还安装有流量传感器8,加速度传感器4.1通过第一通信线缆12与控制器5连接,流量传感器8通过第二通信线缆17与控制器5连接,控制器5通过第三通信线缆13与显示屏2连接,加速度传感器4.1通过感应振动棒1的振动频率再在通过控制器5换算成转速,加速度传感器4.1、流量传感器8采集的信号通过控制器5处理后,再传输至显示屏2实时显示。
23.第一通信线缆12、第二通信.线缆17、第三通信线缆13可以采用can、rs232、rs485等工业总线。
24.进一步地,加速度传感器4.1与控制器5之间设置有接线盒16,加速度传感器4.1与控制器5之间的第一通信线缆12通过接线盒16转接。
25.进一步地,振动棒1设置有若干个,振动棒1上安装的加速度传感器4.1、流量传感器8均通过控制器5连接显示屏2。
26.作为本实施例的进一步说明,所述控制器5可以是工控机、plc或传感器专用控制器,也可以是基于单片机开发的控制器。
27.第二实施例
28.如图1、3所示,第二实施例与第一实施例区别在于:采用磁电传感器4.2代替第一实施例1所述的加速度传感器4.1,磁电传感器4.2安装在液压马达3的壳体尾端,所述液压马达3内的驱动轴9采用铁磁性材质,驱动轴9的尾端偏心设置有约1mm深的槽口10,所述磁电传感器4.2的检测端与驱动轴9端部的槽口10对应配合,实现液压马达3的转速测量。
29.第三实施例
30.如图1、4所示,第三实施例与第二实施例的区别在于:所述液压马达3内的驱动轴9上安装有齿轮11,磁电传感器4.2检测端正对液压马达3内的齿轮11边缘的轮齿,磁电传感
器4.2通过感应轮齿的旋转来测试振动棒转速。
31.第四实施例
32.第四实施例与第一、二、三实施例的区别在于:驱动器采用电动马达代替液压马达3,并取消进油管6、出油管7、以及进油管6上连接的流量传感器8。
技术特征:
1.内置转速传感器混凝土振动棒及监视系统,包括振动棒,振动棒包括驱动器、振动头壳体、以及偏心转子,所述偏心转子安装在振动头壳体内,所述驱动器用于驱动偏心转子转动,其特征在于:所述监视系统还包括显示屏及用于驱动器转速检测的速度传感器,所述速度传感器通过控制器连接显示屏。2.根据权利要求1所述的内置转速传感器混凝土振动棒及监视系统,其特征在于:所述驱动器采用液压马达或电动马达,速度传感器安装在驱动器的壳体上。3.根据权利要求2所述的内置转速传感器混凝土振动棒及监视系统,其特征在于:所述驱动器内的驱动轴采用铁磁性材质,驱动轴的尾端偏心设置有槽口,所述速度传感器采用磁电传感器、并且检测端与驱动轴端部的槽口对应配合。4.根据权利要求2所述的内置转速传感器混凝土振动棒及监视系统,其特征在于:所述驱动器壳体内的驱动轴上安装有齿轮,所述速度传感器采用磁电传感器、并且检测端正对驱动轴上齿轮边缘的轮齿。5.根据权利要求2所述的内置转速传感器混凝土振动棒及监视系统,其特征在于:所述速度传感器采用加速度传感器。6.根据权利要求2所述的内置转速传感器混凝土振动棒及监视系统,其特征在于:液压马达的进油管路上安装有流量传感器,流量传感器通过控制器连接显示屏。7.根据权利要求1所述的内置转速传感器混凝土振动棒及监视系统,其特征在于:振动棒设置有若干个,振动棒上安装的速度传感器、流量传感器通过控制器连接显示屏。
技术总结
内置转速传感器混凝土振动棒及监视系统,涉及一种振动棒。包括振动棒,振动棒包括驱动器、振动头壳体、以及偏心转子,所述偏心转子安装在振动头壳体内,所述驱动器用于驱动偏心转子转动,其特征在于:所述监视系统还包括显示屏及用于驱动器转速检测的速度传感器,所述速度传感器通过控制器连接显示屏。驱动器在工作时,其驱动轴连续运转,被磁电传感器感应输出感应信号,或者驱动器带动偏心转子产生的振动被加速度传感器感应输出感应信号,与振动棒转速成比例的感应信号上传到控制器,经过控制器的处理后,传输到显示屏进行显示。传输到显示屏进行显示。传输到显示屏进行显示。
技术研发人员:赵国普 黄烨 陆晨 卞晓峰 王吉 卢广跃
受保护的技术使用者:江苏四明工程机械有限公司
技术研发日:2021.09.03
技术公布日:2022/2/7