1.本发明涉及铁路线路维修作业领域,尤其涉及新型环保电动驱动捣固装置。
背景技术:
2.最早的铁路道碴捣固机捣固装置,它是一种以偏心轴连接摇摆式振动、异步夹持原理工作的,通过液压缸的伸缩带动捣镐按下——夹实——张开——提升,通过偏心轴摇摆式振动。由于液压元件流体流动的阻力和泄漏较大,如果处理不当,泄漏不仅污染场地,而且还有可能引起火灾和爆炸事故,并且工作性能易受到温度变化的影响,使用和维修要求有较高的技术水平,维修成本比较高。为了解决这些问题,因此我们设计新型环保电动驱动捣固装置就显得非常有必要了。
技术实现要素:
3.本发明的目的是为了解决现有液压元件流体流动的阻力和泄漏较大,容易引发事故以及维修成本高的问题而提出的新型环保电动驱动捣固装置。
4.为了实现上述目的,本发明采用了如下技术方案:
5.新型环保电动驱动捣固装置,包括横梁、升降导杆、升降平台,两个所述升降导杆对称安装于横梁上并向下与升降平台连接固定,所述横梁安装有与升降平台连接的升降电缸,还包括夹持电缸固定座、电动激振器、空气缓冲器、智能电控箱;
6.所述夹持电缸固定座固定在升降平台底面中部,所述夹持电缸固定座上对称连接有夹持电缸,夹持电缸端部活动连接夹持臂,所述夹持臂底面设有圆锥接触面,
7.所述电动激振器外侧罩设有固定壳体,所述电动激振器通过固定壳体固定连接在固定销的端部,所述电动激振器的振动杆通过销销接在夹持臂上。
8.优选的,所述智能电控箱内部安装有plc等控制系统,实现两个电动激振器和两个夹持电缸的同步连接与启动。
9.优选的,所述捣镐与夹持臂通过圆锥接触面连接。
10.优选的,所述横梁下部设置了两个空气缓冲器。
11.优选的,所述升降电缸与夹持电缸的伸缩和部件之间力的传递,最终实现捣镐上下移动和下插力的传递,以及横向夹持力量的传递。
12.优选的,两个所述夹持电缸进行相同推力和不同行程的运动,实现两个捣镐的异步夹持功能。
13.优选的,所述电动激振器带动一把捣镐,实现捣镐横向振动夹持。
14.与现有技术相比,本发明提供了新型环保电动驱动捣固装置,具备以下有益效果:
15.(1)本发明采用电气元部件进行控制,同时通过智能电控箱的设置可以实现根据不同线路铁路作业条件,进行直接的作业压力,运动行程和运动频率的变换、设定和存储,试下作业过程的数字化控制。捣镐的上下运动和左右运动均通过电缸类元部件直接进行控制,一方面可以更容易的实现作业参数系统调整,同步误差控制,同时也可以相较与传统液
压元件控制更环保、整洁和便于维修。
16.(2)所述电动激振器通过固定壳体固定连接在固定销的端部,电动激振器的振动杆通过销销接夹持臂上,捣镐在电动激振器带动下实现对道碴的振动密实,减少了振动作业的能量消耗和各运动部件的振动损耗。
17.(3)在横梁下部设置了两个空气缓冲器,当升降平台向上运动到终点时,可以缓解和减少升降平台对横梁的冲击。
附图说明
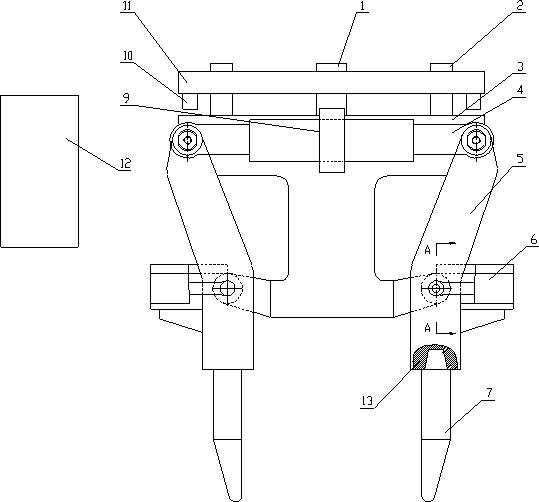
18.图1为新型环保电动驱动捣固装置示意图;
19.图2电动激振器的安装方式示意图。
20.图号说明:1、升降电缸;2、升降导杆;3、升降平台;4、夹持电缸;5、夹持臂;6、电动激振器;7、捣镐;9、夹持电缸固定座;10、空气缓冲器;11、横梁;12、智能电控箱;13、圆锥接触面;14、固定销;15、振动杆;16、固定壳体;17、销。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
22.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
23.实施例:
24.请参阅图1-2,新型环保电动驱动捣固装置,包括横梁11、升降导杆2、升降平台3,两个升降导杆2对称安装于横梁11上并向下与升降平台3连接固定,横梁11安装有与升降平台3连接的升降电缸1,还包括夹持电缸固定座9、电动激振器6、空气缓冲器10、智能电控箱12;夹持电缸固定座9固定在升降平台3底面中部,夹持电缸固定座9上对称连接有夹持电缸4,夹持电缸4端部活动连接夹持臂5,夹持臂5底面设有圆锥接触面13,电动激振器6外侧罩设有固定壳体16,电动激振器6通过固定壳体16固定连接在固定销14的端部,电动激振器6的振动杆15通过销17销接在夹持臂5上。
25.智能电控箱12内部安装有plc等控制系统,实现两个电动激振器6和两个夹持电缸4的同步连接与启动。
26.夹持臂5通过圆锥接触面13与捣镐7连接。
27.横梁11下部设置了两个空气缓冲器10。
28.本发明中捣镐7在电动激振器6带动下实现对道碴的振动密实,通过夹持电缸4带动夹持臂5实现捣镐7横向夹持道碴力量的传递,夹持电缸通过夹持电缸固定座9连接在升降平台3上,通过升降电缸1实现升降平台3沿着升降导杆2上下移动和下插力的传递,进而实现位于装置下端捣镐7的上下运动和对道碴的下插压实。
29.智能电控箱12可以灵活的设置装置的适当位置,通过电缆进行控制连接。智能电控箱12的设置,可以实现每次进行道碴捣固作业前,根据被作业线路的设计状况,选取和设
定捣固作业时的振动频率、下插深度和下插及夹持力的参数值并进行作业模式存储,在实际作业时根据不同的线路状态选择相应的作业模式参数,智能电控箱12可以实现两个电动激振器6和两个夹持电缸4的同步启动,同时容易实现与plc等控制系统连接,实现高精密运动控制。
30.升降电缸1缸体固定于横梁11,活塞端固定在升降平台3上,升降电缸1的伸缩运动使得升降平台3沿着升降导杆2做上下往复运动和力的传递。
31.两个夹持电缸4分别控制左右两把捣镐7的横向运动,夹持电缸4缸体固定于升降平台3,活塞端铰接固定在夹持臂5上部,夹持电缸4的伸缩运动使得夹持臂5上部实现横向往复运动,从而带动连接于夹持臂5下部的捣镐7的横向运动和力的传递。通过智能电控箱12实现两个夹持电缸4进行相同推力和不同行程的动作,实现左右两个捣镐7的异步运动夹持功能。
32.电动激振器6通过固定壳体16固定连接在固定销14的端部,电动激振器6的振动杆15通过销17销接夹持臂5上,捣镐7在电动激振器6带动下实现对道碴的振动密实,减少了振动作业的能量消耗和各运动部件的振动损耗。
33.捣镐7与电动激振器6通过圆锥接触面13连接,捣镐7属于易损零件,更换比较频繁,这种连接方式便于拆装。
34.在横梁11下部设置了两个空气缓冲器10,当升降平台3向上运动到终点时,可以缓解和减少升降平台3对横梁的冲击。
35.本发明提供的新型环保电动驱动捣固装置的优点在于:装置中所有运动功能均直接采用电气元部件进行控制,同时通过智能电控箱12的设置可以实现根据不同线路铁路作业条件,进行直接的作业压力,运动行程和运动频率的变换、设定和存储,试下作业过程的数字化控制。捣镐7的上下运动和左右运动均通过电缸类元部件直接进行控制,一方面可以更容易的实现作业参数系统调整,同步误差控制,同时也可以相较与传统液压元件控制更环保、整洁和便于维修。
36.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。