1.本发明属于钢轨轨道技术领域,具体涉及一种新型钢轨轨道系统。
背景技术:
2.在现有的技术的轨道钢轨轨道领域,钢轨轨道系统是由普通钢轨、钢轨夹板(又称鱼尾板)、螺栓紧固件进行连接的长轨组成,同时是由二条平行的长轨组成的。
3.本发明中的新型钢轨轨道系统是一种复合型的轨道系统,在新型钢轨轨道系统中通过不同的轨道连接方式将各种功能的轨道系统连接起来,并且有新的可以使轨道机车安全运行的功能。
4.新型钢轨轨道系统中可以对轨道机车提供二种动力执行方式,分别是:轨道上面的摩擦作用力和齿条的作用力,从而可以大大增强轨道机车的运行范围;这种新型钢轨轨道系统适合于更加复杂的工况,更适合于特种行业的轨道机车的牵引。
技术实现要素:
5.本发明的目的是提供一种新型钢轨轨道系统,来解决上述技术问题。
6.本新型钢轨轨道系统,包括:齿轨轨道单元、左端过渡轨、右端过渡轨、梯子轨轨道单元、普轨底装轨道单元、普轨轨道单元,并通过销轴组件连接成钢轨轨道;以及自驱动行走装置适于在所述钢轨轨道上运行。
7.齿轨轨道单元,由若干个齿轨轨道首尾相连接,各齿轨轨道之间通过销轴组件连接;齿轨轨道由齿轨钢轨、齿条、左焊座、右焊座、中焊座焊接而成;齿条与驱动齿轮进行啮合传动,用于动力驱动;齿轨钢轨用于支撑驱动车轮,支撑自驱动行走装置;齿轨轨道单元的所有齿轨钢轨的第一轨腰空间、第二轨腰空间完全空出。
8.左过渡轨、右过渡轨与齿轨轨道单元通过销轴组件连接;过渡钢轨通过第一轨底通孔、底板接头联结与普轨底装轨道单元连接;过渡钢轨也具有通过第一轨腰通孔、夹板接头联结与普轨轨道单元连接的可行性。
9.梯子轨轨道单元由若干个梯子轨轨道通过销轴组件连接形成;梯子轨轨道由梯子轨钢轨、左焊座、右焊座、中焊座焊接而成;梯子轨轨道单元通过钢轨夹板、夹板螺栓紧固件与普轨轨道单元连接,梯子轨轨道单元通过销轴组件与齿轨轨道单元连接;梯子轨轨道单元的所有梯子轨钢轨的第五轨腰空间、第六轨腰空间完全空出。
10.普轨底装轨道单元由二列平行的,由底装钢轨组成的长轨构成;二根底装钢轨之间通过底板接头联结相连接;底板接头联结是二根底装钢轨的第二轨底通孔与轨底安装板的轨底安装板通孔相对应,并通过底板螺栓紧固件进行紧固连接;普轨底装轨道单元的所有底装钢轨的二侧的二个第七轨腰空间、第八轨腰空间完全空出;底装钢轨用于与驱动车轮进行摩擦传动,当驱动车轮作为驱动轮主动转动时,通过上述的摩擦作用使自驱动行走装置在普轨底装轨道单元上运行。
11.普轨钢轨用于与与驱动车轮进行摩擦传动,当与驱动车轮作为驱动轮主动转动
时,通过上述的摩擦作用使自驱动行走装置在普轨轨道单元上运行。
12.自驱动行走装置在齿轨轨道单元上运行时,驱动齿轮作为驱动的主动转动,通过驱动齿轮与齿条的啮合传动,驱动自驱动行走装置在齿轨轨道单元上运行;驱动车轮与齿轨钢轨的之间用来支撑自驱动行走装置,作纯滚动;翻转卡轮伸入到齿轨钢轨的第一轨腰空间、第二轨腰空间内,防止自驱动行走装置脱轨于齿轨轨道单元。
13.进一步,自驱动行走装置在普轨底装轨道单元上运行时,驱动车轮作为驱动的主动转动,通过驱动车轮与底装钢轨的摩擦作用,使自驱动行走装置在普轨底装轨道单元上运行;翻转卡轮伸入到底装钢轨的第七轨腰空间、第八轨腰空间内,防止自驱动行走装置脱轨于普轨底装轨道单元。
14.进一步,自驱动行走装置在普轨轨道单元上运行时,驱动车轮作为驱动的主动转动,通过驱动车轮与普轨钢轨的摩擦作用,使自驱动行走装置在普轨钢轨上运行;翻转卡轮翻转到高于普轨钢轨的位置,翻转卡轮处于普轨钢轨的上方,防止翻转卡轮与普轨轨道单元的干涉。
15.本发明中的新型钢轨轨道系统是一种复合型的轨道系统,在新型钢轨轨道系统中通过不同的轨道连接方式将各种功能的轨道系统连接起来,在这个新型钢轨轨道系统是却用同一种规格的钢轨。新型钢轨轨道系统中可以对轨道机车提供二种动力执行方式,分别是:轨道上面的摩擦作用力和齿条的轨向作用力,从而可以大大增强轨道机车的牵引力。这种新型钢轨轨道系统适合于更加复杂的工况,更适合于特种行业的轨道机车的牵引。自驱动行走装置具有轮轨摩擦驱动和齿轮齿条啮合驱动二种方式,以通过与新型钢轨轨道系统的匹配来提供更大的牵引能力。
附图说明
16.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
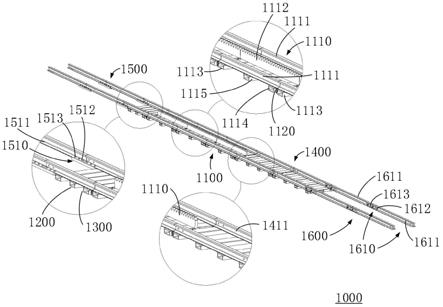
17.图1新型钢轨轨道系统示意图;
18.图2是齿轨轨道示意图;
19.图3是齿轨钢轨示意图;
20.图4是齿轨示意图;
21.图5是左焊座示意图;
22.图6是右焊座示意图;
23.图7是中焊座示意图;
24.图8是销轴组件示意图;
25.图9是左过渡轨示意图;
26.图10是过渡钢轨示意图一;
27.图11是过渡钢轨示意图二;
28.图12是右过渡轨示意图;
29.图13是焊接梯子轨示意图;
30.图14是梯子钢轨示意图;
31.图15是普轨底装轨道单元示意图;
32.图16是底板接头联结示意图;
33.图17是底装钢轨示意图一;
34.图18是底装钢轨示意图二;
35.图19是钢轨底板示意图;
36.图20是底板螺栓紧固件示意图;
37.图21是普轨轨道单元示意图;
38.图22是夹板接头联结示意图;
39.图23是普轨钢轨示意图;
40.图24是钢轨夹板示意图;
41.图25是夹板螺栓紧固件示意图;
42.图26是齿轨轨道单元、梯子轨轨道单元、普轨轨道单元的连接示意图;
43.图27是齿轨轨道单元、左过渡轨(右过渡轨)、普轨底装轨道单元的连接示意图;
44.图28是左过渡轨与普轨轨道单元的连接示意图;
45.图29是右过渡轨与普轨轨道单元的连接示意图;
46.图30是自驱动行走装置(卡轮卡轮)示意图;
47.图31是自驱动行走装置(卡轮翻转)示意图;
48.图32是自驱动行走装置在齿轨轨道单元运行示意图;
49.图33是自驱动行走装置在普轨底装轨道单元运行示意图;
50.图34是自驱动行走装置在梯子轨轨道单元运行示意图;
51.图35是自驱动行走装置在普轨轨道单元运行示意图;
52.图中:
53.新型钢轨轨道系统1000,包括:齿轨轨道单元1100,左过渡轨1200,右过渡轨1300,梯子轨轨道单元1400,普轨底装轨道单元1500,普轨轨道单元1600
54.齿轨轨道单元1100,包括:齿轨轨道1110,销轴组件1120;
55.齿轨轨道1110,包括:齿轨钢轨1111,齿条1112,左焊座1113,右焊座1114,中焊座1115;
56.齿轨钢轨1111,具有:第一轨腰空间1118,第二轨腰空间1119;
57.左焊座1113,右焊座1114,具有:凸座孔1116,凹座孔1117;
58.左过渡轨1200,包括:过渡钢轨1201、左焊座1113、中焊座1115。
59.右过渡轨1300,包括:过渡钢轨1201、右焊座1114、中焊座1115。
60.过渡钢轨1201,具有:第一轨底通孔1202,第一轨腰通孔1203,第三轨腰空间1208,第四轨腰空间1209
61.梯子轨轨道单元1400,包括:梯子轨轨道1410、销轴组件1120
62.梯子轨轨道1410,包括:梯子轨钢轨1411、左焊座1113、右焊座1114、中焊座1115
63.梯子轨钢轨1411,具有:第二轨腰通孔1412,第五轨腰空间1418,第六轨腰空间1419
64.普轨底装轨道单元1500,包括:底板接头联结1510
65.底板接头联结1510,包括:底装钢轨1511,轨底安装板1512,底板螺栓紧固件1513
66.底装钢轨1511,具有:第二轨底通孔1514,轨底面1515,第七轨腰空间1518,第八轨腰空间1519
67.轨底安装板1512,具有:轨底安装平面1516,轨底安装板通孔1517
68.普轨轨道单元1600,包括:夹板接头联结1610
69.夹板接头联结1610包括:普轨钢轨1611,钢轨夹板1612,夹板螺栓紧固件1613
70.普轨钢轨1611,具有:轨腰通孔1614,第九轨腰空间1618,第十轨腰空间1619
71.钢轨夹板1612,具有:夹板通孔1615
72.自驱动行走装置200,包括:翻转卡轮210,翻转卡轮轴211,翻转卡轮翻转轴212,翻转卡轮固定轴213,车轮架220,驱动车轮230,驱动齿轮240。
具体实施方式
73.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下的所有其他实施例,都属于本发明保护范围。
74.实施例
75.如图1所示,新型钢轨轨道系统1000由:齿轨轨道单元1100、左端过渡轨1200、右端过渡轨1300、梯子轨轨道单元1400、普轨底装轨道单元1500、普轨轨道单元1600等组成,销轴组件1120用以连接上述各系统。
76.具体的,齿轨轨道单元1100由若干个个齿轨轨道1110首尾相连接组成,是新型钢轨轨道系统1000的核心系统。
77.具体的,齿轨轨道单元1100左端与左过渡轨1200或右过渡轨1300连接,左过渡轨1200、右过渡轨1300通过底板接头联结1510与普轨底装轨道单元1500连接。
78.进一步,左过渡轨1200、右过渡轨1300也可以通过夹板接头联结1610与普轨轨道单元1600连接。
79.具体的,齿轨轨道单元1100右端与梯子轨轨道单元1400连接,梯子轨轨道单元1400通过夹板接头联结1610与普轨轨道单元1600连接。
80.具体的,在新型钢轨轨道系统1000中,齿轨轨道单元1100、左端过渡轨1200、右端过渡轨1300、梯子轨轨道单元1400、普轨底装轨道单元1500中的相关的轨腰空间完全空出,没有任何障碍物。
81.进一步,第一轨腰空间1118、第二轨腰空间1119,第三轨腰空间1208、第四轨腰空间1209,第五轨腰空间1418、第六轨腰空间1419,第七轨腰空间1518、第八轨腰空间1519,完全空出,没有任何障碍物。
82.如图1、2~8所示,齿轨轨道单元1100,由若干个齿轨轨道1110首尾相连接,各齿轨轨道1110之间通过销轴组件1120连接。
83.具体的,如图2~7所示,齿轨轨道1110,主要由:齿轨钢轨1111、齿条1112、左焊座1113、右焊座1114、中焊座1115等焊接而成。
84.进一步,二根齿轨钢轨1111平行布置,齿条1112位于二根齿轨钢轨1111内。左焊座
1113焊接在齿轨轨道1110的左端,右焊座1114焊接于齿轨轨道1110的右端,中焊座1115加强齿轨轨道1110的整体强度。
85.进一步,齿轨钢轨1111用于支撑驱动车轮230,驱动车轮230在齿轨钢轨1111上滚动。
86.进一步,齿轨钢轨1111的二侧的第一轨腰空间1118、第二轨腰空间1119完全空出,没有任何障碍物;整个齿轨轨道单元1100的所有齿轨钢轨1111的第一轨腰空间1118、第二轨腰空间1119完全空出,没有任何障碍物。
87.具体的,如图2~8所示,左焊座1113有一个凸座孔1116和二个凹座孔1117,右焊座1114有二个凸座孔1116和一个凹座孔1117。
88.进一步,左焊座1113、右焊座1114通过销轴组件1120来连接。
89.进一步,凸座孔1116伸入到凹座孔1117内,销轴组件1120安装在凸座孔1116、凹座孔1117内。
90.具体的,如图4所示,齿条1112用于啮合传动,是齿条1112固定于齿轨轨道1110的动力传动,用于与驱动齿轮240进行啮合传动。
91.如图1、9~12所示,左过渡轨1200,主要由:过渡钢轨1201、左焊座1113、中焊座1115等焊接而成;右过渡轨1300,主要由:过渡钢轨1201、右焊座1114、中间焊座1115等焊接而成。
92.具体的,如图1所示,左过渡轨1200的一端的焊接左焊座1113使用销轴组件1120,与齿轨轨道1110的右端的右焊座1114连接。右过渡轨1300一端的焊接右焊座1114使用销轴组件1120,与齿轨轨道1110的左端的左端焊座1113连接。
93.具体的,如图10、11所示,过渡钢轨1201的一端具有第一轨底通孔1202、第一轨腰通孔1203,同时具有第三轨腰空间1208、第四轨腰空间1209。
94.进一步,过渡钢轨1201的第一轨腰通孔1203、普轨钢轨1611的轨腰通孔1614、钢轨夹板1612的夹板通孔1615相对应,通过钢轨夹板1612和夹板螺栓紧固件1613使过渡钢轨1201与普轨钢轨1611连接。
95.进一步,过渡钢轨1201的第一轨底通孔1202、底装钢轨1511的第二轨底通孔1514、轨底安装板1512的轨底安装板通孔1517相对应,通过轨底安装板1512和底板螺栓紧固件1513使过渡钢轨1201与底装钢轨1511连接。
96.具体的,左端过渡轨1200、右端过渡轨1300的所有第三轨腰空间1208,第四轨腰空间1209完全空出,没有任何障碍物。
97.如图1、2、13、14、21所示,梯子轨轨道单元1400,由若干个梯子轨轨道1410首尾相连接,各梯子轨轨道1410之间通过销轴组件1120连接。
98.具体的,如图13所示,梯子轨轨道1410,主要由:梯子轨钢轨1411、左焊座1113、右焊座1114、中焊座1115等焊接而成。
99.进一步,焊接时二根梯子轨钢轨1411平行布置,左焊座1113焊接在左端,右焊座1114焊接在右端,中焊座1115加强梯子轨轨道1410的整体强度。
100.具体的,如图13所示,梯子轨轨道1410的所有第五轨腰空间1418、第六轨腰空间1419完全空出,没有任何障碍物。
101.具体的,如图1、2、13所示,梯子轨轨道单元1400一端的左焊座1113与齿轨轨道单
元1100一端的右焊座1114通过销轴组件1120连接;相对上述,同时存在另一种连接形式:梯子轨轨道单元1400一端的右焊座1114与齿轨轨道单元1100一端的左焊座1113通过销轴组件1120连接。
102.具体的,如图1、13、21所示,梯子轨轨道单元1400一端的梯子轨钢轨1411上的第二轨腰通孔1412、普轨钢轨1611的轨腰通孔1614、钢轨夹板1612的夹板通孔1615相互对应,通过钢轨夹板1612和夹板螺栓紧固件1613使梯子轨轨道单元1400与普轨钢轨系统1600连接。
103.具体的,梯子轨钢轨1411与驱动车轮230具有摩擦并驱动的作用。
104.如图1、15~20所示,普轨底装轨道单元1500是二列由底板接头联结1510所组成的长轨组成,二列长轨平行。
105.具体的,如图17、18所示,底装钢轨1511的二端有第二轨底通孔1514,底装钢轨1511为对称性结构,符合相关标准。
106.具体的,如图19所示,轨底安装板1512的断面为凹形,用以扣装底装钢轨1511。具有:轨底安装平面1516、轨底安装板通孔1517。
107.具体的,如图16~20所示,底板接头联结1510将二根底装钢轨1511连接成一根长轨,用将若干个底板接头联结1510可以将底装钢轨1511连接成更长的长轨。
108.进一步,二根底装钢轨1511相对放置在轨底安装板1512的凹槽内,将底装钢轨1511的轨底面1515与轨底安装板1512的轨底安装板平面1516接触。
109.进一步,二根底装钢轨1511的所有第二轨底通孔1514与轨底安装板1512的轨底安装板通孔1517相对应。
110.进一步,底板螺栓紧固件1513穿入第二轨底通孔1514、轨底安装板通孔1517,并拧紧底板螺栓紧固件1513。
111.具体的,普轨底装轨道单元1500的底板接头联结1510的底装钢轨1511的二侧的第七轨腰空间1518、第八轨腰空间1519完全空出,没有任何障碍物。
112.如图1、21~25所示,普轨轨道单元1600是二列由夹板接头联结1610所组成的长轨组成,二列长轨平行。
113.具体的,如图21~25所示,夹板接头联结1610主要有:普轨钢轨1611、钢轨夹板1612、夹板螺栓紧固件1613。夹板接头联结1610用于将二根普轨钢轨1611连接成一根长轨,若干个夹板接头联结1610可以连接成更长的长轨。
114.进一步,二根普轨钢轨1611相对放置,并在第九轨腰空间1618、第十轨腰空间1619内各放置一块钢轨夹板1612,使二块钢轨夹板1612夹住二根普轨钢轨1611。
115.进一步,,二根普轨钢轨1611的轨腰通孔1614与钢轨夹板1612的夹板通孔1615一一相对应。夹板螺栓紧固件1613同时穿入夹板通孔1615和轨腰通孔1614,并拧紧夹板螺栓紧固件1613。
116.具体的,与普轨轨道单元1600可以连接的有:左端过渡轨1200、右端过渡轨1300、梯子轨轨道单元1400。
117.如图26、1、2、13、21所示,在新型钢轨轨道系统1000中,齿轨轨道单元1100与普轨轨道单元1600的轨道系统之间的连接,是通过梯子轨轨道单元1400来进行过渡性连接的。连接件分别是:销轴组件1120、钢轨夹板1612、夹板螺栓紧固件1613。图26表达了齿轨轨道单元1100、梯子轨轨道单元1400、普轨轨道单元1600三者的关系。
118.具体的,如图1、26所示,齿轨轨道1110位于左侧,与梯子轨轨道1410通过销轴组件1120连接;普轨轨道单元1600位于右侧,与梯子轨轨道1410通过夹板接头联结1610连接;梯子轨轨道1410的数量根据实际工况而定。
119.进一步,梯子轨轨道1410、齿轨轨道1110的左端、右端各为左焊座1113、右焊座1114。连接时,左焊座1113、右焊座1114相对,凸座孔1116伸入凹座孔1117内,使用销轴组件1120连接。
120.进一步,梯子轨轨道1410通过夹板接头联结1610与普轨轨道单元1600连接。进一步,梯子轨钢轨1411具有第二轨腰通孔1412,可以通过钢轨夹板1612、夹板螺栓紧固件1613与普轨钢轨1611连接。
121.如图1、2、9~12、15~20、27所示,在新型钢轨轨道系统1000中,齿轨轨道单元1100与普轨底装轨道单元1500的轨道系统之间的连接,是通过左过渡轨1200、右过渡轨1300来进行过渡性连接的。连接件分别是:销轴组件1120、轨底安装板1512、底板螺栓紧固件1513。图27表达了齿轨轨道单元1100、左过渡轨1200、右过渡轨1300、普轨底装轨道单元1500三者的关系。
122.具体的,如图1、27所示,齿轨轨道单元1100位于右侧,与左过渡轨1200、右过渡轨1300通过销轴组件1120连接;普轨底装轨道单元1500位于左侧,与左过渡轨1200、右过渡轨1300通过底板接头联结1510连接。
123.进一步,左过渡轨1200、右过渡轨1300的数量为一个,根据与齿轨轨道1110与左过渡轨1200、右过渡轨1300相对应的是左焊座1113或右焊座1114来选择使用左过渡轨1200或右过渡轨1300。
124.进一步,左过渡轨1200、右过渡轨1300、齿轨轨道1110的端部为左焊座1113、右焊座1114。连接时,左焊座1113、右焊座1114相对,凸座孔1116伸入凹座孔1117内,使用销轴组件1120连接。
125.进一步,齿轨轨道1110左端是左焊座1113选择右过渡轨1300,齿轨轨道1110左端是右焊座1114选择左过渡轨1200。
126.具体的,如图1、9、12、15、27所示,左过渡轨1200、右过渡轨1300通过底板接头联结1510与普轨底装轨道单元1500连接。
127.进一步,如图10、17、19所示,过渡钢轨1201的一端具有第一轨底通孔1202,底装钢轨1511有第二轨底通孔1514,底装钢轨1511的二端有第二轨底通孔1514。轨底安装板1512的断面为凹形,具有轨底安装板通孔1517。
128.进一步,过渡钢轨1201、底装钢轨1511安装在轨底安装板1512的凹槽内,轨底安装板1512的轨底安装板通孔1517、底装钢轨1511的第二轨底通孔1514、过渡钢轨1201的第一轨底通孔1202相对应,底板螺栓紧固件1513穿入并拧紧。
129.如图28、29所示,除图1中所示外,齿轨轨道单元1100可以通过左过渡轨1200、右过渡轨1300的过渡,与普轨轨道单元1600连接。
130.具体的,齿轨轨道单元1100通过销轴组件1120连接左过渡轨1200、右过渡轨1300,左过渡轨1200、右过渡轨1300通过夹板接头联结1610连接普轨轨道单元1600。
131.具体的,齿轨轨道1110的左焊座1113与右过渡轨1300的右焊座1114通过销轴组件1120连接,齿轨轨道1110的右焊座1114与左过渡轨1边00的左焊座1113通过销轴组件1120
连接。
132.具体的,左过渡轨1200、右过渡轨1300中所焊接的过渡钢轨1201的第一轨腰通孔123,与普轨钢轨1611的轨腰通孔1614,钢轨夹板1612的夹板通孔1615相对应。通过夹板螺栓紧固件1613同时穿入上述通过,并拧紧夹板螺栓紧固件1613进行连接。
133.如图30、31所示,自驱动行走装置200用于在新型钢轨轨道系统1000上行走,通过自驱动行走装置200来实现新型钢轨轨道系统1000的功能和本发明的目的。
134.具体的,驱动车轮230作用在新型钢轨轨道系统1000上,支撑自驱动行走装置200在新型钢轨轨道系统1000上运行。
135.具体的,驱动车轮230与左端过渡轨1200、右端过渡轨1300、梯子轨轨道单元1400、普轨底装轨道单元1500、普轨轨道单元1600在轨面具有摩擦的作用,通过摩擦传动使自驱动行走装置200在新型钢轨轨道系统1000上运行。
136.具体的,驱动齿轮240用于驱动自驱动行走装置200在齿轨轨道单元1100上运行时。
137.进一步,驱动齿轮240与齿条1112啮合,完成驱动齿轮240与齿条1112的啮合传动,用于驱动自驱动行走装置200在齿轨轨道单元1100上运行时。
138.进一步,驱动齿轮240与齿条1112啮合时,驱动车轮230与齿轨钢轨1111是纯滚动,没有摩擦传动,起支撑作用。
139.进一步,驱动齿轮240接受外部动力,作为驱动的主动转动,通过与齿条1112的啮合传动,驱动自驱动行走装置200在齿轨钢轨1111上运行。
140.具体的,翻转卡轮210具有翻转功能和旋转功能。
141.进一步,翻转卡轮210和翻转卡轮轴211为一个组件,翻转卡轮210以翻转卡轮轴211为中心轴旋转,不能沿翻转卡轮轴211的轴向移动。
142.进一步,翻转卡轮210以翻转卡轮翻转轴212为中心轴翻转,并以翻转卡轮固定轴213来固定。
143.具体的,如图30所示,翻转卡轮210可以伸入到轨腰空间,并以翻转卡轮固定轴213来固定。
144.具体的,如图31所示,翻转卡轮210可以翻转到钢轨的上方,并以翻转卡轮固定轴213来固定。
145.具体的,驱动自驱动行走装置200在普轨轨道单元1600上运行时,翻转卡轮210翻转到钢轨的上方。驱动自驱动行走装置200在除普轨轨道单元1600的新型钢轨轨道系统1000上运行时,翻转卡轮210伸入到各钢轨的二侧的二个轨腰空间。
146.如图32所示,在新型钢轨轨道系统1000的实施例中,自驱动行走装置200在齿轨轨道单元1100上运行时:
147.具体的,驱动齿轮240作为驱动的主动转动,通过驱动齿轮240与齿条1112的啮合传动,驱动自驱动行走装置200在齿轨轨道单元1100上运行。
148.具体的,翻转卡轮210伸入到齿轨钢轨1111的第一轨腰空间1118、第二轨腰空间1119,防止自驱动行走装置200脱轨于齿轨轨道单元1100。
149.具体的,驱动车轮230与齿轨钢轨1111之间没有摩擦传动,驱动车轮230与齿轨钢轨1111的之间是纯滚动,用来支撑自驱动行走装置200。
150.如图33所示,在新型钢轨轨道系统1000的实施例中,自驱动行走装置200在普轨底装轨道单元1500上运行时:
151.具体的,驱动车轮230作为驱动的主动转动,通过驱动车轮230与底装钢轨1511的摩擦作用,使自驱动行走装置200在普轨底装轨道单元1500上运行。
152.具体的,翻转卡轮210伸入到底装钢轨1511的第七轨腰空间1518、第八轨腰空间1519内,防止自驱动行走装置20脱轨于普轨底装轨道单元1500。
153.如图34所示,在新型钢轨轨道系统1000的实施例中,自驱动行走装置200在梯子轨轨道单元1400上运行时:
154.具体的,驱动车轮230作为驱动的主动转动,通过驱动车轮230与梯子轨钢轨1411的摩擦作用,使自驱动行走装置200在梯子轨轨道单元1400上运行。
155.具体的,翻转卡轮210伸入到梯子轨钢轨1411的第五轨腰空间1418、第六轨腰空间1419内,防止自驱动行走装置20脱轨于齿轨轨道单元1100。
156.如图35所示,在新型钢轨轨道系统1000的实施例中,自驱动行走装置200在普轨轨道单元1600上运行时:
157.具体的,驱动车轮230作为驱动的主动转动,通过驱动车轮230与普轨钢轨1611的摩擦作用,使自驱动行走装置200在普轨轨道单元1600上运行。
158.具体的,翻转卡轮210翻转到高于普轨钢轨1611的位置,翻转卡轮210处于普轨钢轨1611的上方。
159.在本技术所提供的实施例中,应理解到,所揭露的系统、装置,可以通过其他方式实现。以上所描述的实施例仅是示意性的,例如,所述机构的划分,仅为一种逻辑功能划分,实际实现时可以有另外的划分方式;又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。
160.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
161.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关技术人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须根据权利要求范围来确定其技术性范围。