1.本实用新型涉及道路施工技术领域,具体涉及一种混凝土路面自动整平装置。
背景技术:
2.混凝土道路面层结构越来越普遍,随着混凝土性能的大幅度改善,目前许多交通要道已经施工了混凝土路面,从而现在混凝土路面也担负着较大的交通客流量。
3.混凝土路面在施工时,施工人员需要在路基顶部的两侧沿路基的长度方向立模板,之后在两侧的木板之间浇筑混凝土,混凝土浇筑并且振捣完成后,施工人员需要对混凝土表面进行收面,收面施工质量直接影响了混凝土路面的平整度以及光滑程度。
4.现有技术中,施工人员一般采用抹子在混凝土表面往复推拉,从而对混凝土表面进行整平和收面,也有施工人员采用手持式附着式振捣器对混凝土表面进行振动收面,但是现有技术的这些收面方式都需要消耗大量的人力。
技术实现要素:
5.本实用新型目的是针对现有技术的不足,提出一种混凝土路面自动整平装置,用于解决背景技术中提到的现有技术一般需采用人工方式对混凝土路面进行收面,从而造成需消耗大量劳动力、并且收面效率低下的技术问题。
6.为实现上述目的,本实用新型采用了如下的技术方案:
7.一种混凝土路面自动整平装置,包括:
8.导轨,导轨为两根且两根导轨平行;
9.行走机构,该行走机构设于两根导轨之间,该行走机构与两根导轨均滑动连接,且该行走机构可沿导轨走向滑动;
10.振捣组件,该振捣组件的振捣面朝下,该振捣组件与行走机构滑动连接,且该振捣组件可在行走机构上沿垂直于导轨方向滑动。
11.工作原理:
12.施工人员将两根所述导轨分别架设在刚施工完成的混凝土道路的两侧,之后启动振捣组件,此时振捣组件的振捣面与混凝土表面接触。
13.驱动振捣组件在行走机构上沿着垂直与导轨的方向滑动,该方向即为混凝土道路的宽度方向,直到振捣组件能够对该宽度范围内的混凝土路面进行振捣收面,之后施工人员再驱动行走机构沿着导轨滑动,此时行走机构能够带动振捣组件移动到相邻的下一段混凝土路面上,之后施工人员再驱动振捣组件在行走机构上沿垂直于导轨的方向滑动,从而使振捣组件对对应的该段混凝土道路路面进行振捣收面。
14.依照上述方式持续施工,直到将整段混凝土路面全部完成收面施工。
15.本实用新型的有益效果为:
16.本实用新型使用过程中,施工人员通过驱动振捣组件沿垂直于导轨的方向滑动,该过程中振捣组件能够对该宽度范围内的混凝土路面进行振捣收面,之后通过行走机构带
动振捣组件沿着导轨滑动一段距离,从而使振捣组件移动到下一段相邻的待振捣施工的混凝土路面,之后施工人员再驱动振捣组件沿垂直于导轨的方向滑动,从而完成该段混凝土路面振捣收面施工,以此进行,直到将整条混凝土路面振捣收面施工完毕。
17.该种设置方式能够取代现有技术单纯地需人工作业对混凝土进行收面的方式,从而能够节省大量的劳动力,从而有利于提高收面施工效率。
18.再者,本实用新型中振捣组件能够沿与导轨垂直的方向滑动,从而振捣组件能够对一定宽度范围内的混凝土路面进行振捣收面,从而提高本实用新型的可使用范围,提高适用性。
附图说明
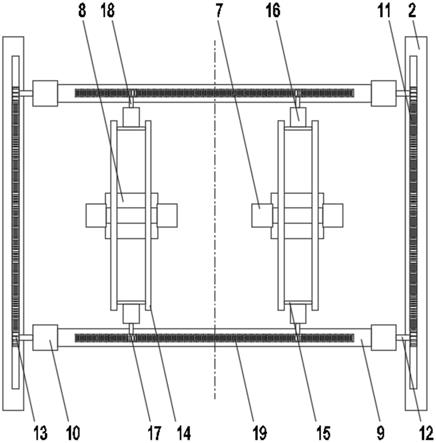
19.图1为本实用新型实施例的结构示意图;
20.图2为导轨侧面的结构示意图。
21.附图标记说明:导轨1、上轨板2、下轨板3、螺纹管4、螺纹杆5、移动轮6、附着式振捣器7、附着振捣板8、安装杆9、第一电机10、第一齿条11、第一转轴12、第一齿轮13、连接杆14、支撑杆15、第二电机16、第二齿轮17、第二转轴18、第二齿条19。
具体实施方式
22.下面结合附图及实施例对本实用新型中的技术方案进一步说明。
23.如图1所示,一种混凝土路面自动整平装置,包括:
24.导轨1,导轨1为两根且两根导轨1平行。
25.行走机构,该行走机构设于两根导轨1之间,该行走机构与两根导轨1均滑动连接,且该行走机构可沿导轨1走向滑动,所述行走机构包括两根平行的安装杆9和四个第一电机10,两根安装杆9均与导轨1垂直,两根安装杆9均设于两根导轨1之间,导轨1上设有沿导轨1走向的第一齿条11,其中两个第一电机10分别固定设于其中一根安装杆9的两端,另外两个第一电机10分别固定设于另一根安装杆9的两端,所述第一电机10的输出端均设有第一转轴12,该第一转轴12上均固定有第一齿轮13,位于两根安装杆9同一端的两个第一齿轮13均与位于该端导轨1上的第一齿条11啮合,该种方式机械化程度高,可更加地省力。
26.如图1所示,振捣组件,所述振捣组件为两个,该振捣组件的振捣面朝下,该振捣组件与行走机构滑动连接,且该振捣组件可在行走机构上沿垂直于导轨1方向滑动,所述振捣组件包括附着式振捣器7和安装在附着式振捣器7上的附着振捣板8,该附着式振捣器7与行走机构滑动连接,且所述附着振捣板8的振捣面朝下。
27.如图1所示,还包括驱动组件,所述驱动组件为两个,该驱动组件设于振捣组件和行走机构之间,以用于驱动振捣组件在行走机构上滑动,两根安装杆9之间设有四根均与安装杆9垂直的连接杆14,其中一个附着式振捣器7固定在位于一侧的两根连接杆14之间,另一个附着式振捣器7固定在位于另一侧的两根连接杆14之间,用于安装附着式振捣器7的两根连接杆14之间固定连接有两根支撑杆15,两根支撑杆15分别靠近连接杆14的两端,所述驱动组件包括两个第二电机16和两个第二齿轮17,两个驱动组件共包括四个第二电机16,其中两个第二电机16分别一一对应固定在两根支撑杆15上,另外两个第二电机16分别一一对应固定在另外两根支撑杆15上,所述第二电机16的输出端设有第二转轴18,第二转轴18
上固定所述第二齿轮17,两根安装杆9上均固定有第二齿条19,位于连接杆14同端的两个第二齿轮17均与对应该端安装杆9上的第二齿条19啮合,驱动组件的该种设置方式同样是提高了本实用新型的机械化程度,有利于节省人力,从而进一步提高施工效率。
28.如图2所示,所述导轨1包括上下对应的上轨板2和下轨板3,所述上轨板2和下轨板3之间设有用于调节两者间距的调节组件,所述第一齿条11均设在上轨板2上。所述调节组件包括两根竖向的螺纹管4和两根竖向的螺纹杆5,两根螺纹管4的顶部均与上轨板2底板固定连接,两根螺纹杆5分别一一对应从两根螺纹管4底部螺纹连接在螺纹管4内,两根螺纹杆5的底部均与下轨板3顶部转动连接,施工人员通过同步转动螺纹杆5,从而可以调节上轨板2和下轨板3之间的间距,进而可以调节附着振捣板8作业高度,该种设置方式可使本实用新型结构对一定厚度范围内的混凝土路面进行收面施工。所述下轨板3底部设有两个间隔的移动轮6,该种方式更便于施工人员沿着混凝土路面走向移动本实用新型结构,从而能够进一步提高对混凝土路面进行收面的施工效率。
29.工作原理:施工人员将两根所述导轨1分别架设在刚施工完成的混凝土道路的两侧,之后根据混凝土路面的厚度,施工人员旋转螺纹杆5,从而调节所述上轨板2的高度,进而使附着振捣板8能够与混凝土路面接触,之后启动振捣组件,此时振捣组件的振捣面与混凝土表面接触。
30.驱动振捣组件在行走机构上沿着垂直与导轨1的方向滑动,具体地,第二电机16驱动第二齿轮17转动,第二齿轮17将沿着第二齿条19移动,从而此时第二齿轮17移动带动第二电机16、连接杆14、附着式振捣器7和附着振捣板8沿着安装杆9长度方向滑动,该方向即为混凝土道路的宽度方向,该过程中附着振捣板8能够对混凝土路面进行振动收面,直到附着振捣板8能够对该宽度范围内的混凝土路面进行振捣收面,之后施工人员再驱动行走机构沿着导轨1滑动,具体地,第一电机10带动第一齿轮13转动,第一齿轮13将沿着对应的第一齿条11移动,此时该第一齿轮13将带动第一电机10、安装杆9、连接杆14、附着式振捣器7和附着振捣板8同步移动,此时行走机构能够带动振捣组件移动到相邻的下一段混凝土路面上,之后施工人员再驱动振捣组件在行走机构上沿垂直于导轨1的方向滑动,从而使附着振捣板8对对应的该段混凝土道路路面进行振捣收面。
31.依照上述方式持续施工,直到将整段混凝土路面全部完成收面施工。
32.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。