1.本实用新型涉及智能机器人技术领域,尤其涉及一种基于物联网的智能机器人。
背景技术:
2.通过信息传感设备,按照约定的协议,把任何物品与互联网连接起来,进行信息交换和通信,以实现智能化识别、定位、跟踪、监控和管理的一种网络。
3.现有科技餐厅中推行一种智能机器人送餐,而现有的送餐机器人仅仅是将客户点的餐送到客户所在的桌子边上,需要客户从上至下依次取出,而处于较低位置的食物需要弯腰才能取出,不便于操作。
技术实现要素:
4.本实用新型的目的是针对背景技术中存在的问题,提出一种能够自动将客户点的物品移动到上端的基于物联网的智能机器人。
5.本实用新型的技术方案:一种基于物联网的智能机器人,包括底座、支撑杆、第一支撑板、第二支撑板、第一托盘、第二托盘、第三托盘、第一丝杆和第二丝杆;
6.支撑杆设置有多个,多个支撑杆均设置在底座上;第一支撑板设置在支撑杆的上端;第二支撑板和第三托盘均与支撑杆滑动连接;第一托盘转动设置在第一支撑板上;第二托盘转动设置在第二支撑板上;第一支撑板和第二支撑板上分别设置有用于驱动第一托盘和第二托盘翻转的翻转机构;第一丝杆和第二丝杆的两端分别转动设置在底座和第一支撑板上;第一丝杆与第二支撑板螺纹连接,且与第三托盘滑动连接;第二丝杆与第三托盘螺纹连接,且与第二支撑板滑动连接;底座上设置有用于驱动第一丝杆和第二丝杆转动的驱动机构;底座上设置有行进轮和处理器;第一托盘、第二托盘和第三托盘均设置有传感器,传感器与处理器通讯连接;处理器与翻转机构和驱动机构控制连接。
7.优选的,翻转机构包括第一电机、主动齿轮和从动齿轮;两个第一电机分别设置在第一支撑板和第二支撑板上;第一电机的输出端与主动齿轮连接,主动齿轮与从动齿轮啮合连接;两个从动齿轮分别设置在第一托盘和第二托盘上;第一电机与处理器控制连接。
8.优选的,第一支撑板和第二支撑板上均设置有挡杆;第一托盘和第二托盘分别与两个挡杆抵接。
9.优选的,驱动机构包括第二电机、主动带轮、从动带轮、张紧轮和传动带;第二电机设置在底座上;第二电机的输出端与主动带轮连接;从动带轮、张紧轮和传动带均设置有两个;两个从动带轮分别设置在第一丝杆和第二丝杆上;主动带轮通过传动带与从动带轮驱动连接;张紧轮滑动设置在底座上,底座上设置有用于驱动张紧轮移动的伸缩缸;张紧轮与传动带滑动连接。
10.优选的,第一托盘、第二托盘和第三托盘上均设置有防滑垫。
11.优选的,底座上设置有垫块,垫块与第三托盘的下端抵接。
12.优选的,第一托盘、第二托盘和第三托盘从上至下依次设置。
13.与现有技术相比,本实用新型具有如下有益的技术效果:
14.本实用新型中,通过行进轮移动,使本实用新型能够移动到指定位置,当将第一托盘上的物品取走后,第一托盘上的传感器检测到上方无物品后,反馈至处理器内,处理器控制翻转机构工作,翻转机构驱动第一托盘,从而使第一支撑板从水平状态转动至竖直状态,从而露出下方的第二托盘;此时驱动机构同时驱动第一丝杆和第二丝杆转动,第一丝杆驱动第二支撑板移动,第二支撑板驱动带动第二托盘上升,从而能够方便将第二托盘上的物品取出,当第二托盘上的物品取出后,翻转机构驱动第二托盘翻转,露出第三托盘;此时驱动机构只驱动第二丝杆转动,第二丝杆驱动第三托盘移动,从而使第三托盘向上移动,方便取出第三托盘上放置的物品,便于使用,全部取出后,驱动机构依次驱动第一丝杆和第二丝杆反向转动,从而使第二支撑板和第三托盘能够依次复位,翻转机构先驱动第二托盘复位,再驱动第一托盘复位,等待下一轮运输。
附图说明
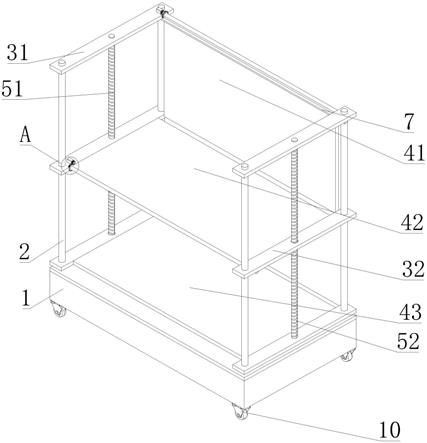
15.图1为本实用新型中实施例的结构示意图;
16.图2为图1的局部结构示意图;
17.图3为图1中a处的局部放大结构示意图。
18.附图标记:1、底座;2、支撑杆;31、第一支撑板;32、第二支撑板;41、第一托盘;42、第二托盘;43、第三托盘;51、第一丝杆;52、第二丝杆;6、翻转机构;601、第一电机;602、主动齿轮;603、从动齿轮;7、挡杆;8、驱动机构;801、第二电机;802、主动带轮;803、从动带轮;804、张紧轮;805、传动带;9、伸缩缸;10、行进轮。
具体实施方式
19.实施例一
20.如图1-3所示,本实用新型提出的一种基于物联网的智能机器人,包括底座1、支撑杆2、第一支撑板31、第二支撑板32、第一托盘41、第二托盘42、第三托盘43、第一丝杆51和第二丝杆52;
21.支撑杆2设置有多个,多个支撑杆2均设置在底座1上;第一支撑板31设置在支撑杆2的上端;第二支撑板32和第三托盘43均与支撑杆2滑动连接;第一托盘41、第二托盘42和第三托盘43从上至下依次设置;第一托盘41转动设置在第一支撑板31上;第二托盘42转动设置在第二支撑板32上;第一支撑板31和第二支撑板32上分别设置有用于驱动第一托盘41和第二托盘42翻转的翻转机构6;第一丝杆51和第二丝杆52的两端分别转动设置在底座1和第一支撑板31上;第一丝杆51与第二支撑板32螺纹连接,且与第三托盘43滑动连接;第二丝杆52与第三托盘43螺纹连接,且与第二支撑板32滑动连接;底座1上设置有用于驱动第一丝杆51和第二丝杆52转动的驱动机构8;底座1上设置有行进轮10和处理器;第一托盘41、第二托盘42和第三托盘43均设置有传感器,传感器与处理器通讯连接;处理器与翻转机构6和驱动机构8控制连接。
22.第一托盘41、第二托盘42和第三托盘43上均设置有防滑垫;防滑垫能够使放置在其上的物体能够放置的更加平稳,防止在移动时滑落。
23.底座1上设置有垫块,垫块与第三托盘43的下端抵接;垫块能够对第三托盘43进行
支撑和限位,防止其脱离第二丝杆52,导致其卡住。
24.本实施例中,通过行进轮10移动,使本实用新型能够移动到指定位置,当将第一托盘41上的物品取走后,第一托盘41上的传感器检测到上方无物品后,反馈至处理器内,处理器控制翻转机构6工作,翻转机构6驱动第一托盘41,从而使第一支撑板31从水平状态转动至竖直状态,从而露出下方的第二托盘42;此时驱动机构8同时驱动第一丝杆51和第二丝杆52转动,第一丝杆51驱动第二支撑板32移动,第二支撑板32驱动带动第二托盘42上升,从而能够方便将第二托盘42上的物品取出,当第二托盘42上的物品取出后,翻转机构6驱动第二托盘42翻转,露出第三托盘43;此时驱动机构8只驱动第二丝杆52转动,第二丝杆52驱动第三托盘43移动,从而使第三托盘43向上移动,方便取出第三托盘43上放置的物品,便于使用,全部取出后,驱动机构8依次驱动第一丝杆51和第二丝杆52反向转动,从而使第二支撑板32和第三托盘43能够依次复位,翻转机构6先驱动第二托盘42复位,再驱动第一托盘41复位,等待下一轮运输。
25.实施例二
26.如图1-2所示,本实用新型提出的一种基于物联网的智能机器人,相较于实施例一,本实施例中翻转机构6包括第一电机601、主动齿轮602和从动齿轮603;两个第一电机601分别设置在第一支撑板31和第二支撑板32上;第一电机601的输出端与主动齿轮602连接,主动齿轮602与从动齿轮603啮合连接;两个从动齿轮603分别设置在第一托盘41和第二托盘42上;第一电机601与处理器控制连接。第一支撑板31和第二支撑板32上均设置有挡杆7;第一托盘41和第二托盘42分别与两个挡杆7抵接。
27.本实施例中,第一电机601驱动主动齿轮602转动,主动齿轮602驱动从动齿轮603转动,从动齿轮603带动第一托盘41或第二托盘42翻转,从而在使用时,将第一托盘41转动至水平位置,并搭在挡杆7上,能够将物品放置到第一托盘41上,当物品取走后,驱动其转动,使第一托盘41处于竖直状态,露出其下方的第二托盘42,方便取出第二托盘42上的物品。
28.实施例三
29.如图1-3所示,本实用新型提出的一种基于物联网的智能机器人,相较于实施例一或实施例二,本实施例中驱动机构8包括第二电机801、主动带轮802、从动带轮803、张紧轮804和传动带805;第二电机801设置在底座1上;第二电机801的输出端与主动带轮802连接;从动带轮803、张紧轮804和传动带805均设置有两个;两个从动带轮803分别设置在第一丝杆51和第二丝杆52上;主动带轮802通过传动带805与从动带轮803驱动连接;张紧轮804滑动设置在底座1上,底座1上设置有用于驱动张紧轮804移动的伸缩缸9;张紧轮804与传动带805滑动连接。
30.本实施例中,当需要第一丝杆51转动时,第一丝杆51处的伸缩缸9推动张紧轮804移动,使传动带805处于张紧状态,第二电机801驱动主动带轮802转动,主动带轮802通过传动带805驱动从动带轮803转动,从而使第一丝杆51能够转动,从而驱动第二托盘42移动;当移动结束复位后,伸缩缸9带动张紧轮804移动,使传动带805处于松弛状态,无法进行传动。
31.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。