1.本实用新型属于水泥清理设备技术领域,特别是涉及一种水泥库筒仓自动控制清灰机器人。
背景技术:
2.水泥库是水泥生产企业的基本设施之一,由于各种因素导致库内粉料容易粘结内壁、堆积库底,使库容减少、出料不畅甚至无法出料,为保证企业的系统生产,必须定时定期进行清库作业。国内企业清库主要采用人工方法进行,但人工清理难度大,耗时长,成本高,工人还存在高空落物、坍塌、掩埋,底部踩空等重大危险因素,时刻危及清库工作人员的生命安全。水泥清库作业目前已经成了水泥安全生产事故中的第一杀手,要想彻底规避此类事故发生,最好的办法就是开发可智能控制的机械设备来代替人工作业。
3.现有的水泥清库机器人采用的清库执行元件大多是旋转刀头、铁链、毛刷等硬质构件,切削、打碎粘接在库壁的物料,从而达到清灰效果。例如公开号为cn 103963054 a的专利公开了一种采用悬挂方式进行移动的机器人,末端采用硬质毛刷,其缺点是:一方面,该设备的末端执行元件在工作过程中不可避免地会与混凝土库壁直接接触,对库壁造成细微损伤;另一方面,直接接触的末端执行元件往往清洁区域过小,工作效率低下,无法快速清库。
技术实现要素:
4.本实用新型主要解决的技术问题是提供一种水泥库筒仓自动控制清灰机器人,能够对筒仓进行全方位的清理,不留任何死角,清洁区域大,效率高。
5.为解决上述技术问题,本实用新型采用的一个技术方案是:一种水泥库筒仓自动控制清灰机器人,包括吊装机构、支撑机构、支撑臂机构、工作臂机构和清灰机构,所述吊装机构位于筒仓顶部,所述支撑机构分别与所述支撑臂机构、所述工作臂机构连接,所述清灰机构位于所述工作臂机构的末端;
6.所述吊装机构能够驱动所述支撑机构上下移动,以及能够驱动所述支撑臂机构由垂直状态转动至水平状态;
7.所述支撑机构驱动所述工作臂机构旋转,从而带动清灰机构对水泥库筒仓的内壁进行清理。
8.本实用新型为解决其技术问题所采用的进一步技术方案是:
9.进一步地说,所述吊装机构包括悬挂钢索、至少一条导向钢索、用于缠绕所述悬挂钢索的第一卷筒、用于缠绕所述导向钢索的第二卷筒、驱动所述第一卷筒收放的提升电机a和驱动所述第二卷筒收放的提升电机b。
10.进一步地说,所述支撑机构包括立杆、支撑底座、转动关节和变幅推杆,所述立杆的上端与所述悬挂钢索连接,所述立杆的下端与所述支撑底座连接,所述转动关节与所述支撑底座相连,所述变幅推杆的一端与所述转动关节铰接,且另一端与所述工作臂机构铰
接。
11.进一步地说,所述支撑臂机构包括至少一条支撑臂,所述导向钢索的一端与所述支撑臂连接。
12.进一步地说,所述清灰机构包括储气罐、金属软管、末端喷射管,所述金属软管的一端与所述储气罐连通,所述金属软管的另一端与所述末端喷射管连通,所述末端喷射管上安装有喷头。
13.进一步地说,所述工作臂机构包括一条工作臂和配重箱,所述工作臂与所述转动关节连接,所述金属软管缠于所述工作臂上,所述配重箱位于所述喷头的反方向。
14.进一步地说,所述支撑臂采用的是四节直推式电动缸,包括第一节臂、第二节臂、第三节臂和第四节臂,所述第四节臂的末端安装橡胶软垫。
15.进一步地说,所述立杆的侧面上装有一个导向轮,所述导向钢索的一端绕过所述导向轮与所述支撑臂连接。
16.进一步地说,所述支撑底座上安装有至少一台摄像机。
17.本实用新型的有益效果至少具有以下几点:
18.1、本实用新型包括吊装机构、支撑机构、支撑臂机构、工作臂机构和清灰机构五大部分,吊装机构通过悬挂钢索将后四个部分(处于收缩状态)从仓顶的开口投入到筒仓内部,释放钢索使其到达清理高度,机器人的支撑臂展开并伸长直到与筒壁紧密支撑在一起,通过筒壁的反作用以及支撑结构使机器人处于稳定状态;
19.2、本实用新型的清灰机构采用的是空气吹灰法,通过机器人的工作臂展开并伸长,将末端喷射管送到对准板结物料的清理位置,释放高压气体,产生强烈冲击波将板结物料从内壁击落。
附图说明
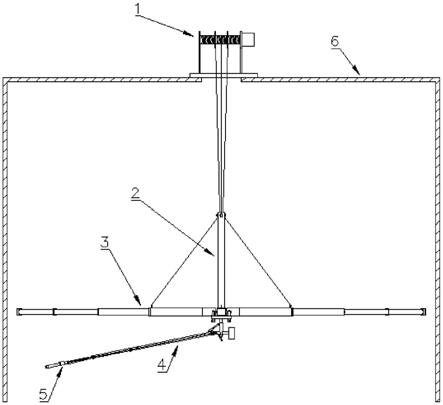
20.图1是本实用新型处于工作状态时的结构示意图之一;
21.图2是本实用新型处于工作状态时的结构示意图之二;
22.图3是本实用新型未处于工作状态时的结构示意图;
23.图4是本实用新型吊装机构的结构示意图;
24.图5是本实用新型一条支撑臂处于工作状态时的结构示意图;
25.图6是本实用新型工作臂机构处于工作状态时的结构示意图;
26.附图中各部分标记如下:
27.吊装机构1,
28.第一卷筒11、第二卷筒12、悬挂钢索13、导向钢索14、提升电机a 15、提升电机b16;
29.支撑机构2,
30.立杆21、第一销轴22、支撑底座23、导向轮24、中心轴筒25、转动关节26、变幅推杆27、第二销轴28;
31.支撑臂机构3,
32.第一节臂31、第二节臂32、第三节臂33、第四节臂34、橡胶软垫35;
33.工作臂机构4,
34.第一节杆41、第二节杆42、第三节杆43、配重箱44;
35.清灰机构5,
36.末端喷射管51、金属软管52、喷头53;
37.筒仓6,
38.摄像机a、摄像机b、摄像机c。
具体实施方式
39.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
40.实施例:一种水泥库筒仓自动控制清灰机器人,如图1-图6所示,包括吊装机构1、支撑机构2、支撑臂机构3、工作臂机构4和清灰机构5,所述吊装机构位于筒仓6顶部,所述支撑机构分别与所述支撑臂机构、所述工作臂机构连接,所述清灰机构位于所述工作臂机构的末端;
41.所述吊装机构能够驱动所述支撑机构上下移动,以及能够驱动所述支撑臂机构由垂直状态转动至水平状态;
42.所述支撑机构驱动所述工作臂机构旋转,从而带动清灰机构对水泥库筒仓的内壁进行清理。
43.机器人进入库体前为收缩状态,即支撑臂3、工作臂4都处于竖直位置,所有的电动缸都没有伸长,如图3所示。
44.所述吊装机构包括悬挂钢索13、至少一条导向钢索14、用于缠绕所述悬挂钢索的第一卷筒11、用于缠绕所述导向钢索的第二卷筒12、驱动所述第一卷筒收放的提升电机a 15和驱动所述第二卷筒收放的提升电机b16。本实施例中,所述导向钢索设有三条,所述第二卷筒通过挡板分为三段,每段都缠绕一条导向钢索。
45.所述支撑机构包括立杆21、支撑底座23、转动关节26和变幅推杆27,所述立杆的上端与所述悬挂钢索连接,所述立杆的下端与所述支撑底座连接,所述转动关节与所述支撑底座相连,所述变幅推杆的一端与所述转动关节铰接,且另一端与所述工作臂机构铰接。悬挂钢索与立杆的顶部连接,通过悬挂钢索的收放带动整个机器人主体上下移动。
46.所述支撑臂机构包括至少一条支撑臂,所述导向钢索的一端与所述支撑臂连接。所述支撑臂设有三条,三条所述支撑臂沿所述支撑底座的沿圆周方向均匀布置。所述支撑底座上设有三个第一销轴22,绕立杆中心轴线呈120
°
环形布置。每个第一销轴分别与一条支撑臂底端相连,使支撑臂可以绕第一销轴在竖直平面内转动,由于支撑底座的限制,当支撑臂从竖直转动到水平位置后不能再转动。支撑臂以电动马达作为直接动力源,带动内部的丝杠旋转,将螺旋运动转化为直线运动,使臂伸展,完全伸展开后总长不小于筒仓半径。
47.所述清灰机构包括储气罐、金属软管52、末端喷射管51,所述金属软管的一端与所述储气罐连通,所述金属软管的另一端与所述末端喷射管连通,所述末端喷射管上安装有喷头53。储气罐安装在水泥库顶部,而金属软管则将高压气体从储气罐传送至末端喷射管。末端喷射管安装在工作臂的末端,喷射管带有气动步进旋转喷头,每喷射一次,喷头自动旋转一定角度,可大大提高有效清理范围,而且三条工作臂均可搭载末端喷射管,同时工作从而实现高效清库。
48.所述工作臂机构包括一条工作臂和配重箱,所述工作臂与所述转动关节连接,所述金属软管缠于所述工作臂上,所述配重箱位于所述喷头的反方向。本实施例,工作臂采用的是三节直推式电动缸,包括第一节杆41、第二节杆42和第三节杆43,所述转动关节通过中心轴筒25与支撑底座相连,转动关节上设有第二销轴28,通过第二销轴与第一节杆的销轴孔相连,通过控制旋转电机可以控制关节的转动角度;所述变幅推杆的另一端与所述第一节杆铰接,通过变幅推杆的缩短、伸长,驱动工作臂绕底部销轴做往复式旋转运动。配重箱通过短杆与转动关节相连,起到平衡作用。
49.所述支撑臂采用的是四节直推式电动缸,包括第一节臂31、第二节臂32、第三节臂33和第四节臂34,所述第四节臂的末端安装橡胶软垫35,在臂与库体接触时起到缓冲作用。
50.所述立杆的侧面上装有一个导向轮24,所述导向钢索的一端绕过所述导向轮与所述支撑臂连接。本实施例,立杆为三棱柱形状,每个侧面上都装有一个导向轮,所述导向钢索的一端绕过所述导向轮与所述支撑臂连接。
51.所述支撑底座上安装有至少一台摄像机。所述支撑底座上安装有三台摄像机,分别为摄像机a、摄像机b和摄像机c,三台摄像机呈120
°
环形布置。三台摄像机拍摄的画面在后台进行画面拼接处理就可以得到库内无死角实时图像。
52.本实用新型的工作原理如下:
53.吊装机构上的两台提升电机启动,悬挂钢索和三条导向钢索同时释放,在重力作用下,机器人主体从筒仓顶部中心开口进入库体内部,并从上往下移动。在这个过程中安装在支撑底座上的三台高清摄像机a、b、c在不断地拍摄筒壁照片并上传到服务器通过数据处理,找到需要清理的部位,并计算出清理高度。
54.在到达适当的清理高度后,控制悬挂钢索的提升电机a关闭,三条导向钢索继续释放,使支撑臂绕支撑底座上的第一销轴转动,直至水平,关闭提升电机b。
55.启动支撑臂的内置电机,使第一节臂到第四节臂慢慢伸长,直到橡胶软垫牢牢地支撑在筒仓内壁上,三条伸缩臂都是如此,通过筒壁的反作用力使机器人稳定在筒仓内部。
56.变幅推杆启动,推杆伸长,使工作臂绕连接第二销轴转动,将工作臂展开。转动关节绕中心轴筒转动适当角度,使末端喷射管对准清理位置。启动工作臂的内置电机,使第一节杆到第三节杆慢慢伸长,将末端喷射管送到与清理点相隔有效距离的位置。
57.启动清灰机构,高压气体通过金属软管从末端喷射管喷出,将板结、粘连的物料从内壁上面击碎并剥离。该部位清理干净后,再次控制转动关节转动一定角度,将工作臂对准同一高度的另一个清理点,此过程中工作臂可以灵活的伸缩,使清理位置保持在末端喷射管的有效清理距离以内。
58.当同一高度的筒仓内壁表面都清理干净后,三条支撑臂同步缩短,使机器人回到不稳定状态,接着启动提升电机,悬挂钢索和三条导向钢索同步释放使机器人到达下一个清理高度,再关闭提升电机,如此一层一层地进行清灰工作,直至将筒仓内表面所有部位清理干净。最后使机器人恢复到收缩状态,通过吊装机构将其从顶部开口提出筒仓,完成清理作业。
59.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。