1.本实用新型涉及智能机器人领域,尤其涉及一种拖动示教喷涂机器人。
背景技术:
2.在喷涂行业,大多数厂家采用人工作业,但因为喷涂环境恶劣,充斥着油漆的刺激性气味,员工进行操作时必须做好防护,导致操作不便且长期作业会对人体有害,因此,人工喷涂一直存在效率低,成本高等问题。随着技术的进步,越来越多的厂家选择采用机器人作业,而一般的机器人在更换喷涂产品时需要重新编程,对于复杂外观的产品,机器人的编程周期会很长,从而拖慢整体的工期。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种拖动示教,更换产品无需编程的拖动示教喷涂机器人。
4.根据本实用新型的一些实施例的一种拖动示教喷涂机器人,包括:
5.底座;
6.关节组件,活动设置在所述底座上,包括依次连接的两个以上的关节臂;
7.所述关节臂之间均通过关节件传动连接,各个所述关节件上连接有驱动电机;
8.编码器,设置在所述驱动电机上,用于检测所述关节件的动作情况;
9.喷涂器,设置在所述关节组件的自由端上;
10.操控机构,设置在所述关节组件的自由端上,所述操控机构用于拖动所述关节组件并控制所述喷涂器的开启或关闭;
11.控制装置,与所述驱动电机、所述编码器及所述操控机构电连接。
12.根据本实用新型实施例的一种拖动示教喷涂机器人,至少具有如下有益效果:
13.通过设置编码器,对产品进行喷涂时,由工人拖动示教一次即可转换为机械操作,更换产品时不需要重新编写喷涂程序,机构紧凑,操作简单。
14.根据本实用新型的一些实施例,所述喷涂器连接有至少一个输料阀,所述输料阀用于为所述喷涂器提供喷涂材料。
15.根据本实用新型的一些实施例,所述喷涂器连接有两个所述输料阀,两个所述输料阀的其一为所述喷涂器提供涂料,另一为所述喷涂器提供空气。
16.根据本实用新型的一些实施例,所述操控机构包括设置在所述关节组件自由端上的控制手柄,所述控制手柄与所述控制系统电连接,用于控制所述驱动电机和所述输料阀的开启或关闭以及拖动所述关节组件移动。
17.根据本实用新型的一些实施例,所述控制手柄包括设置在所述关节组件自由端上的第一手柄与活动设置在所述第一手柄上的第二手柄,所述第一手柄与所述第二手柄之间设置有档位控制开关,通过控制所述第一手柄与所述第二手柄之间的不同配合状态,可实现不同的档位控制。
18.根据本实用新型的一些实施例,所述操控机构还包括设置在所述关节组件自由端上的用于辅助拖动所述关节组件的辅助手柄。
19.根据本实用新型的一些实施例,所述底座与所述关节组件通过关节件传动连接,所述关节组件包括依次连接的第一关节臂、第二关节臂、第三关节臂、第四关节臂以及第五关节臂,所述底座与所述第一关节臂转动连接,所述喷涂器和所述操控机构设置在所述第五关节臂上。
20.根据本实用新型的一些实施例,所述底座与所述第一关节臂之间的关节件为转动关节,所述第一关节臂与所述第二关节臂之间、所述第二关节臂与所述第三关节臂之间、所述第三关节臂与所述第四关节臂之间的关节件均为摆动关节,所述第四关节臂与所述第五关节臂之间的关节件为转动关节。
21.根据本实用新型的一些实施例,所述关节组件上设置有辅助支撑机构。
22.根据本实用新型的一些实施例,所述辅助支撑机构包括第一连杆,所述第一连杆的一端与所述第一关节臂转动连接,另一端与所述第三关节臂转动连接。
23.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
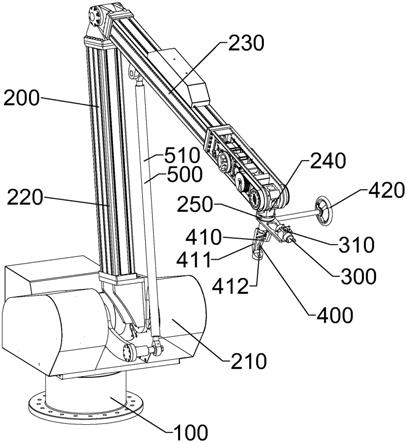
24.图1为本实用新型一实施例的立体结构示意图;
25.图2为本实用新型一实施例的主视图;
26.图3为本实用新型一实施例的俯视图;
27.图4为本实用新型一实施例的右视图。
具体实施方式
28.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
29.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
31.本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可
以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
32.如图1至图4所示,本实用新型公开的一种拖动示教喷涂机器人,包括:底座100;关节组件200,活动设置在底座100上,包括依次连接的两个以上的关节臂;关节臂之间均通过关节件传动连接,各个关节件上连接有驱动电机;编码器,设置在驱动电机上,用于检测关节件的动作情况;喷涂器300,设置在关节组件200的自由端上,优选地,喷涂器300为喷嘴或喷枪;操控机构400,设置在关节组件200的自由端上,操控机构400用于拖动关节组件200并控制喷涂器300的开启或关闭;控制装置,与驱动电机、编码器及操控机构400电连接。本实用新型通过在连接着关节件的驱动电机上安装编码器用以检测关节件的动作状况,在关节组件200的自由端设置喷涂器300和操控机构400,操作人员通过操控机构400拖动关节组件200及控制喷涂器300的开启或关闭,按照工序要求,对产品外形进行喷涂动作。同时,各编码器共同记录对应关节件的动作状态,获取关节组件200的运动轨迹,本实用新型在拖动示教结束后便可以按照示教的轨迹进行喷涂作业。后期无论更换多少产品,只需由操作人员在第一个产品上进行拖动示教即可转换为机械操作,不需要重新编写喷涂程序,降低了成本,结构紧凑。将喷涂器300与操控喷涂器300的操控机构400共同放置在关节组件200的自由端上,操作人员可以方便地控制喷涂器300的开启或关闭,方便操作人员操作,有利于将熟练工人的操作经验“传授”给本实用新型。
33.如图1至图4所示,在一些实施例中,喷涂器300连接有至少一个输料阀310,输料阀310用于为喷涂器300提供喷涂材料。优选地,如图1至图4所示,在一些实施例中,喷涂器300连接有两个输料阀310,两个输料阀310的其一为喷涂器300提供涂料,另一为喷涂器300提供空气。设置多个输料阀310,便于为喷涂器300提供多种喷料,以实现不同的功能。当喷涂器300接通提供空气的输料阀310,喷涂器300可喷出带有一定压力的空气,对待喷涂的产品表面进行清洁;当喷涂器300接通提供不同涂料的输料阀310,喷涂器300可将两种不同的涂料喷涂在产品上。优选地,当同时打开提供涂料以及空气的输料阀310,带压力的气体与涂料混合,可将喷出的涂料雾化,便于喷涂。
34.如图1至图4所示,在一些实施例中,操控机构400包括设置在关节组件200自由端上的控制手柄410,控制手柄410与控制系统电连接,用于控制驱动电机和输料阀310的开启或关闭以及拖动关节组件200移动。采用控制手柄410的方式进行操控,便于操作人员握持以及拖动关节组件200。优选地,如图1至图4所示,在一些实施例中,控制手柄410包括设置在关节组件200自由端上的第一手柄411与活动设置在第一手柄411上的第二手柄412,第一手柄411与第二手柄412之间设置有档位控制开关,通过控制第一手柄411与第二手柄412之间的不同配合状态,可实现不同的档位控制。具体地,通过按压第二手柄412来控制第一手柄411与第二手柄412之间的配合状态,通过按压第二手柄412,第一手柄411与第二手柄412之间形成的夹角大小对应于不同的档位控制,具体地,输料阀310设置有两个,档位设置有三挡,按压第二手柄412时启动一档,驱动电机工作,解锁拖动;继续按压第二手柄412时启动二挡,开启提供空气的输料阀310,喷涂器300喷出带有一定压力的空气,该档位可对产品进行清洁除尘;继续按压第二手柄412时启动三挡,同时开启提供空气与涂料的输料阀310,喷涂器300喷出雾化涂料对产品进行喷涂。优选地,控制手柄410与控制装置电连接,控制装置能记录控制手柄410的对输料阀310的控制状态。设置档位控制开关可满足控制手柄410
控制驱动电机以及各个输料阀310的开启或关闭的需要,操作灵活方便。
35.如图1至图4所示,在一些实施例中,操控机构400还包括设置在关节组件200自由端上的用于辅助拖动关节组件200的辅助手柄420。设置辅助手柄420有利于更省力地拖动关节组件200。优选地,辅助手柄420为一长条杆,该长条杆的一端连接在控制手柄410上,另一端设置有握持部,优选地,握持部为设置在长条杆一端上的握持圆环,操作人员操作该实用新型时,可以一只手握在控制手柄410上,另一只手握在辅助手柄420上,便于施力拖动关节组件200动作,保证操作人员控制喷涂器300工作时的稳定性,提高喷涂的准确率。
36.如图1至图4所示,在一些实施例中,底座100与关节组件200通过关节件传动连接,关节组件200包括依次连接的第一关节臂210、第二关节臂220、第三关节臂230、第四关节臂240以及第五关节臂250,底座100与第一关节臂210转动连接,喷涂器300和操控机构400均设置在第五关节臂250上。关节组件200包括五个可活动关节臂,实现了五个自由度,在多自由度的关节组件200调整角度的作用下,喷涂器300可以在多角度上对产品进行喷涂,实现多方位喷涂的效果。优选地,如图1至图4所示,在一些实施例中,底座100与第一关节臂210之间的关节件为转动关节,第一关节臂210与第二关节臂220之间、第二关节臂220与第三关节臂230之间、第三关节臂230与第四关节臂240之间的关节件均为摆动关节,第四关节臂240与第五关节臂250之间的关节件为转动关节,转动与摆动相互协作,操作更灵活高效。
37.如图1至图4所示,在一些实施例中,关节组件200上设置有辅助支撑机构500。由于机械关节臂的重量很大,即使设置有减速器,当外力碰撞到关节组件200时,也会存在一定的危险。设置辅助支撑机构500,能对关节组件200之间的连接进行加固,提高关节组件200的运动稳定性,减少了安全隐患。优选地,如图1至图4所示,在一些实施例中,辅助支撑机构500包括第一连杆510,第一连杆510的一端与第一关节臂210转动连接,另一端与第三关节臂230转动连接。当拖动关节组件200时,两端分别与第一关节臂210和第三关节臂230连接的第一连杆510可以起到支撑作用,提高本实用新型使用时候的安全性能。
38.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
39.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。