1.本实用新型属于型材抓取技术领域,特别涉及一种基于机器人和视觉识别系统的管、型材无序抓取装置。
背景技术:
2.型材在加工时由于工艺需要需要经常对其进行转运,通常广泛使用带吊耳的转运筐作为工序间型材转运和库房存放型材的载体。市场上纯人工搬动或移动型材生产效率慢,在搬动或移动的过程中操作不当,造成的报废率较高从而提高了生产成本。而且不同的人员使用的力度不一样,手法不一样,造成型材的力学性能也会存在差异。由于人员流动性较大,培养一个成熟的操作人员需要很长的时间,需要付出很多的成本。一旦人员流动,新员工在熟悉工作流程之前会由于操作不当造成很高的不良品。但是目前的型材加工行业,加工过程大部分采用人工上下料。人工上下料效率低、精度低、风险大,而大部分工业机械手只能用于一种产品规格,高度固定,很难调整,并且无法根据需要将型材的特定面放置在其他位置上,无法满足市场需求。
3.为解决上述问题,我们提供了一种可对型材进行无序抓取放置的基于机器人和视觉识别系统的管、型材无序抓取装置。
技术实现要素:
4.本实用新型目的在于克服现有技术中存在的不足而提供一种基于机器人和视觉识别系统的管、型材无序抓取装置。
5.本实用新型的目的是这样实现的:基于机器人和视觉识别系统的管、型材无序抓取装置,包括有存放机构,所述存放机构包括有放置架、挡板,挡板位于放置架右侧;存放机构前侧设置有机器人抓取机构;存放机构附近设置有视觉识别机构,存放机构后侧设置有至少两个支撑机构。
6.进一步的,所述视觉识别机构包括有摄像头、支撑杆、视觉识别系统,摄像头固定设置在支撑杆上,视觉识别系统与摄像头连接。
7.进一步的,所述机器人抓取机构包括有机器人、横梁、插销、电缸、移动夹具、固定夹具;横梁与机器人的机械臂连接,横梁的两端后侧分别固定设置有一个电缸,电缸输出端固定连接有移动夹具,电缸下方的横梁下表面固定设置有固定夹具,其中一端的固定夹具底部固定连接有插销,插销外端为锥形结构。
8.进一步的,所述支撑机构包括有支撑架、辊子,支撑架上端可转动的设置有两个辊子,两个辊子之间成v形且开口向上分布。
9.进一步的,所述横梁的两端分别设置有一个电缸固定架,电缸固定架内设置有电缸,电缸输出端固定连接有连接板一,连接板一下端固定连接有移动夹具,移动夹具下表面固定连接有橡胶垫二。其中一端的固定夹具底部固定连接有插销固定板,插销连接在插销固定板内侧,滑杆固定在连接板一上表面,滑杆上端可滑动的贯穿电缸固定架。固定夹具侧
视图为c形结构,固定夹具后侧内部开设有矩形凹槽一,固定夹具底部开设有矩形凹槽二,固定夹具底部前侧开设有斜面;移动夹具可上下移动的位于固定夹具中间。
10.本实用新型使用时,将型材放置在放置架上,通过视觉识别机构上的摄像头以及视觉识别系统对放置架上的型材的位置进行识别,视觉识别技术为现有技术不在赘述;对型材的位置识别后配合机器人抓取机构将型材进行抓取放置在支撑机构上;即机器人带动横梁进行移动,将插销对准型材的一端的开口处,将型材向上提取移动放置在支撑机构上;此时型材末端顶着挡板防止型材一端移动时型材向右侧发生滑动影响型材的向上提取。将型材的一端放置在支撑机构上之后,将插销脱离型材;再使用两个移动夹具与固定夹具对型材进行夹紧将其整个放置在支撑机构上,即当型材位于固定夹具与移动夹具之间时,通过电缸带动移动夹具移动使其对型材进行加紧;然后再将型材横向放置在支撑机构上。支撑机构上设置有两个v形分布的辊子,可以用来承接型材,辊子可以转动可以便于型材在支撑机构上进行移动。
11.有益效果:本装置可以实现自主导航,自主抓取型材,并且具有快速定位、准确抓取、准确放料的优点。
附图说明
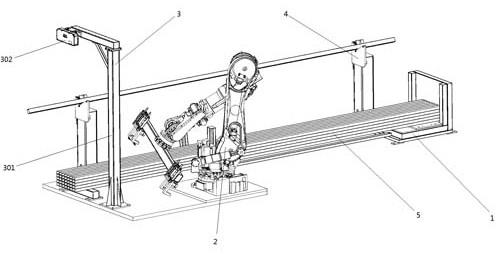
12.图1为实用新型的结构示意图。
13.图2为实用新型局部结构示意图。
14.图3为实用新型存放机构结构示意图。
15.图4为实用新型支撑机构结构示意图。
16.图5为实用新型支撑机构局部结构示意图。
17.图6为实用新型机器人抓取机构结构示意图。
18.图7为实用新型机器人抓取机构局部结构示意图。
19.图8为实用新型的机器人抓取机构部分结构示意图。
20.图9为实用新型的机器人抓取机构局部结构后侧示意图。
21.图10为实用新型固定夹具与移动夹具结构示意图。
22.附图标记说明:
23.1.存放机构、101.底板、102.防撞架、103.放置架、104.固定杆、105.挡板、106.调整板、107.放置板、2.机器人抓取机构、201.机器人、202.横梁、203.电缸固定架、204.电缸、205.滑杆、206.移动夹具、207.橡胶垫二、208.插销、209.固定夹具、210.插销固定板、211.连接板一、3.视觉识别机构、301.支撑架、302.摄像头、4.支撑机构、401支撑架、402.支撑板、403.护板、404.辊子、405.固定块一、406.转轴、407.固定块二、408.固定块三、5.型材。
具体实施方式
24.实施例1
25.如图1-10所示,本实用新型的目的是这样实现的:基于机器人和视觉识别系统的管、型材无序抓取装置,包括有存放机构1,存放机构1包括有底板101、固定杆104、放置架103、防撞架102、放置板107、挡板105、调整板106,底板101与放置板107之间通过固定杆104连接,通过固定杆104将其进行连接可将其连接为一个整体,避免在后续对型材5进行提升
时由于挡板受力,导致挡板后移。即同时可以保证型材5一侧抬高时型材5另一端与挡板105接触过程中,避免挡板105受力右移,导致底板101与放置板107之间的距离增大。防撞架102与放置架103固定在底板101上表面,防撞架102与放置架103固定在底板101上表面,防撞架102上端为平面,对型材5一端进行支撑,防止型材5伸出放置架过长,造成型材5受力弯曲。放置板107上表面设置有调整板106,调整板106为可上下调节高度的调整板106,方便对管、型材一端的高度进行调节,实现对管、型材一端与另一端的高度差的调节,可上下调节的调整板106具体结构不做限制。调整板106可以避免型材5与放置板107接触对其造成磨损,同时可以缓冲型材5放置时与放置板107的冲击,防止型材5的一端对放置板107进行刮蹭;挡板105固定在放置板107外端面,且挡板105两端凸起,避免型材5一端提起时型材5滑出挡板105,造成安全隐患;底板101上表面还固定设置有机器人抓取机构2;存放机构1附近设置有视觉识别机构3,存放机构1后侧设置有至少两个支撑机构4。
26.视觉识别机构3包括有摄像头302、支撑杆301、视觉识别系统,摄像头302固定设置在支撑杆301上,视觉识别系统与摄像头302连接;机构识别型材5的摆放位置以及型材5的形状,实现快速定位,配合机械臂的灵活度高、精度高的特点,可以实现准确的抓取;即摄像机构识别出型材5的摆放位置以及型材5各个面的朝向。
27.机器人抓取机构2包括有机器人201、横梁202、插销固定板210、插销208、电缸204、连接板一211、电缸固定架203、移动夹具206、橡胶垫二207、固定夹具209、滑杆205;横梁202与机器人201的机械臂连接,横梁202的两端分别固定设置有一个电缸固定架203,电缸固定架203内设置有电缸204,电缸204输出端固定连接有连接板一211,连接板一211下端固定连接有移动夹具206,移动夹具206下表面固定连接有橡胶垫二207,设置有橡胶垫二207可以避免在夹紧型材5时移动夹具206与型材5之间产生磨损,同时设置有橡胶垫二207具有一定的弹性,可以防止型材5在夹紧的过程中产生位移,影响型材5的夹紧;电缸固定架203下方的横梁202上固定有固定夹具209,移动夹具206与固定夹具209相互配合可以实现对型材5的夹紧;其中一端的固定夹具209底部固定连接有插销固定板210,插销208连接在插销固定板210内侧,滑杆205固定在连接板一211上表面,滑杆205上端可滑动的贯穿电缸固定架203。
28.支撑机构4包括有支撑架401、护板403、支撑板402、辊子404、转轴406、固定块一405、固定块二407、固定块三408,护板403与支撑板402分别固定在支撑架401上端侧面,支撑板402上端开设有v形凹槽,固定块一405、固定块二407、固定块三408分别固定在支撑板402内侧面,固定块二407分别与固定块一405与固定块三408之间固定设置有转轴406,转轴406上可转动的设置有辊子404;护板403内侧设置有加强肋,加强肋内侧面为斜面,加强肋的斜面与内侧的辊子404倾斜角度相同,护板403与加强肋可以辅助型材5在放置在支撑机构4上时对型材5进行限位,避免型材5歪斜角度过大,造成型材5脱落支撑机构4;即支撑架401上端可转动的设置有两个辊子404,两个辊子404之间成v形且开口向上分布,辊子404v形开口可以放置型材5,并避免型材5脱出,辊子404可转动可以使得型材5更加易于在支撑机构4上移动。
29.本实用新型使用时,将型材5放置在放置架103上,通过视觉识别机构3上的摄像头302以及视觉识别系统对放置架103上的型材5的位置进行识别,视觉识别技术为现有技术不在赘述;对型材5的位置识别后配合机器人抓取机构2将型材5进行抓取放置在支撑机构4
上;即机器人201带动横梁202进行移动,将插销208对准型材5的一端的开口处,将型材5向上提取移动放置在支撑机构4上;此时型材5末端顶着挡板105防止型材5一端移动时型材5向右侧发生滑动影响型材5的向上提取。将型材5的一端放置在支撑机构4上之后,将插销208脱离型材5;再使用两个移动夹具206与固定夹具209对型材5进行夹紧将其整个放置在支撑机构4上,即当型材5位于固定夹具209与移动夹具206之间时,通过电缸204带动移动夹具206移动使其对型材5进行加紧;然后再将型材5横向放置在支撑机构4上。支撑机构4上设置有两个v形分布的辊子404,可以用来承接型材5,辊子404可以转动可以便于型材5在支撑机构4上进行移动。
30.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、
ꢀ“
右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、
“ꢀ
顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
31.以上所述仅为本实用新型的优选实施例而已,并不用以限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。