1.本发明涉及智能机器人领域,特别是涉及一种防爆式轨道巡检机器人。
背景技术:
2.目前大规模应用的轨道式巡检机器人,由于其相对于人工巡检来说,具有综合投入少且能够适应人工不能到达的复杂环境的特点,因此在电力、煤炭等行业得到普遍应用。一般来说,轨道巡检机器人,按照轨道布设类型,可大致分为地轨和天轨(吊轨)两种类型。除此之外,这两种不同类型的巡检机器人,还存在使用场景上的不同。例如,针对吊轨型轨道机器人来说,通常由于地面环境复杂,不易布设地轨,因此其通常应用于封闭的室内空间。这其中也包括了类似井下等特殊环境。但往往,这些应用场景中,均或多或少存在环境恶劣的问题,因此,对于部署在这类环境的巡检机器人来说,应具备一定的防爆性能。但是,目前现有技术中并不存在切实有效的技术方案。另外,目前大多轨道巡检机器人,并不存在安全可靠的制动机构,不能在发生突发状况时,及时制动以进行更详细的数据采集。
技术实现要素:
3.鉴于现有技术存在的上述问题,本发明的一个方面的目的在于提供一种防爆式轨道巡检机器人,该巡检机器人的重要零部件均被包覆设计在防爆壳体内,且设计有应急制动机构,可在突发状况时,保持运行正常的情况下,及时采集数据。
4.为了实现上述目的,本发明一个方面提供的防爆式轨道巡检机器人,包括轨道和挂载在所述轨道上的行走机构,所述行走机构包括防爆壳体和设置在所述防爆壳体内的安装架,所述安装架上设置有驱动机构和连接在所述驱动机构的输出端的行走轮,所述行走轮滚动适配在所述轨道上并受所述驱动机构驱动;其中,所述安装架上还设置有用于对所述行走机构进行紧急制动的制动机构。
5.作为优选,所述制动机构交叉铰接在所述安装架上的第一铰接臂和第二铰接臂,整体呈“x”形,所述第一铰接臂和所述第二铰接臂靠近底部的端部之间,设置有提供制动力的制动件,所述制动件构造为施力于两个所述端部,以使另一端对轨道形成夹持以形成制动。
6.作为优选,所述制动件包括弹簧波纹管和设置于所述弹簧波纹管内的电磁铁,所述电磁铁受控地产生磁性吸引力以使所述第一铰接臂和所述第二铰接臂的另一端对所述轨道形成夹持,所述弹簧波纹管构造为在所述电磁铁释放时产生复位力。
7.作为优选,所述第一铰接臂和所述第二铰接臂产生夹持力的一端,设置有依靠摩擦力进行制动的摩擦轮。
8.作为优选,所述摩擦轮包括相对设置的第一摩擦轮和第二摩擦轮,且所述第一摩擦轮和所述第二摩擦轮分别通过第一摩擦轮支架以及第二摩擦轮支架,固定在所述第一铰接臂和所述第二铰接部的端部。
9.作为优选,所述驱动机构包括蓄电池、行走电机和连接在所述行走电机的输出端
的减速机,所述行走轮连接在所述减速机上。
10.作为优选,所述行走机构上设置有一升降机构,所述升降机构位于所述行走机构的所述防爆壳体外侧的端部,设置有防爆摄像头。
11.作为优选,所述升降机构包括位于所述防爆壳体内且固定在所述安装架上的升降电机,所述升降电机的输出端,通过齿轮组的输出端与升降螺杆啮合,所述防爆摄像头设置于所述升降螺杆上。
12.作为优选,所述升降螺杆包括并列设置的第一升降螺杆和第二升降螺杆。
13.作为优选,所述第一升降螺杆和所述第二升降螺杆的末端,设置有基台,所述防爆摄像头固定在所述基台上,且所述基台上还设置有温度传感器、烟雾传感器和/或补光灯。
14.本发明提供的防爆式轨道巡检机器人,可通过防爆外壳对重要器件进行保护,并且在本发明中,设置了精确可控的制动机构,该制动机构受控地使巡检机器人准确停留在适当位置,以便进行必要的数据采集。
附图说明
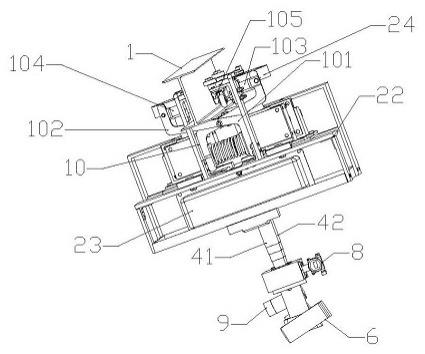
15.图1为本发明的防爆式轨道巡检机器人的立体结构示意图(隐去部分外壳)。
16.图2为本发明的防爆式轨道巡检机器人的另一个立体结构示意图(隐去部分外壳)。
17.图3为本发明的防爆式轨道巡检机器人的再一个立体结构示意图(隐去部分外壳)。
18.图4为本发明的防爆式轨道巡检机器人的又一个立体结构示意图(隐去全部外壳)。
19.附图标记:1-轨道;2-行走机构;3-驱动机构;4-升降机构;5-引导轮机构;6-防爆摄像头;7-温度传感器;8-烟雾传感器;9-补光灯;10-制动机构;21-防爆外壳;22-安装架;23-蓄电池;24-行走轮;31-行走电机;32-减速机;41-第一升降螺杆;42-第二升降螺杆;43-齿轮组;101-第一铰接臂;102-第二铰接臂;103-第一摩擦轮支架;104-第二摩擦轮支架;105-第一摩擦轮。
具体实施方式
20.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
21.此处参考附图描述本发明的各种方案以及特征。
22.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
23.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都位于借此所限定的保护范围内。
24.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
25.如图1至图4所示,本发明一个实施例提供的防爆式轨道巡检机器人,包括轨道1和挂载在所述轨道1上的行走机构2,所述行走机构2包括防爆壳体21和设置在所述防爆壳体21内的安装架22,所述安装架22上设置有驱动机构3和连接在所述驱动机构3的输出端的行走轮24,所述行走轮24滚动适配在所述轨道1上并受所述驱动机构3驱动;其中,所述安装架22上还设置有用于对所述行走机构2进行紧急制动的制动机构10。在一些具体实现方式中,如图4所示,所述制动机构10包括交叉铰接在所述安装架22上的第一铰接臂101和第二铰接臂102,整体呈“x”形,所述第一铰接臂101和所述第二铰接臂102靠近底部的端部之间,设置有提供制动力的制动件(图中未标注),所述制动件构造为施力于两个所述端部,以使另一端对轨道形成夹持以形成制动。更具体来说,所述制动件可以包括弹簧波纹管和设置于所述弹簧波纹管内的电磁铁,所述电磁铁受控地产生磁性吸引力以使所述第一铰接臂101和所述第二铰接臂的另一端对所述轨道1形成夹持,所述弹簧波纹管构造为在所述电磁铁释放时产生复位力。
26.为了取得相对较好的制动力,在所述第一铰接臂101和所述第二铰接臂102产生夹持力的一端,最好设置耐磨材料制成的摩擦件,例如,可设置有依靠摩擦力进行制动的橡胶材质的摩擦轮。更进一步,所述摩擦轮包括相对设置的第一摩擦轮102和第二摩擦轮(未示出),且所述第一摩擦轮105和所述第二摩擦轮分别通过第一摩擦轮支架103以及第二摩擦轮支架104,固定在所述第一铰接臂103和所述第二铰接部104的端部。
27.对于本发明中的驱动机构3来说,实际上目前常规的驱动机构实现方式均可适用于本发明,但是,在本发明中,优选地,所述驱动机构包括蓄电池23、行走电机31和连接在所述行走电机31的输出端的减速机32,所述行走轮24连接在所述减速机32上。
28.再具体地,所述行走机构2还上设置有一升降机构4,所述升降机构4位于所述行走机构2的所述防爆壳体21外侧的端部,可设置有防爆摄像头6。所述升降机构包括位于所述防爆壳体内且固定在所述安装架上的升降电机,所述升降电机的输出端,通过齿轮组的输出端与升降螺杆啮合,所述防爆摄像头设置于所述升降螺杆上。当然,也可同时设置温度传感器、烟雾传感器和补光灯等。但此时最好单独设置一基台,在所述基台上设置温度传感器、烟雾传感器和/或补光灯。
29.更具体地,所述升降螺杆包括并列设置的第一升降螺杆41和第二升降螺杆42。以此可提供更为稳定的升降控制,即使在意外情况下,也可保证摄像头和传感器处于工作位置。
30.在另一些实施例中,本发明的防爆式轨道巡检机器人,还可包括引导轮机构,该引导轮机构5并不包括在防爆壳体21内,其作用除了起行走引导作用外,还可辅助清除轨道1上的异物。
31.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。