1.本实用新型涉及机器人技术领域,具体涉及一种机器人。
背景技术:
2.随着科技的进步,对巡逻、安保等要求越来越高,尤其是车站码头、工厂或办公区域等已经有机器人巡逻,一旦出现不良情形,机器人可第一时间将现场情况反馈给监控中心来处置或者机器人可自动处置。
3.目前的机器人的机身需要与其它部件连接电线等,而目前机器人的机身上没有方便电线走线的结构,接线不方便,如果电线暴露在外容易损坏。
技术实现要素:
4.本实用新型的目的在于克服现有技术中的缺点与不足,提供一种机器人。
5.本实用新型的一个实施例提供一种机器人,包括:底盘、设置在所述底盘上的探测雷达、机头、机身和设置在所述机身底部的连接座;
6.所述连接座包括基座和设置在所述基座底部的若干支撑腿,所述基座与所述机身连接,所述支撑腿用于与机器人的底盘连接,所述支撑腿围绕所述基座布置,形成有容纳探测雷达的空间,所述支撑腿内部设置有连通所述机身内部的走线通道,所述支撑腿与所述底盘连接,所述探测雷达设置在所述支撑腿之间的空隙;
7.所述机身内设置有容纳腔,所述容纳腔的顶部设置有第一开口;
8.所述机器人还包括顶台,所述顶台设置在所述第一开口处,所述机头设置在所述顶台上。
9.相对于现有技术,本实用新型的机器人通过连接座的支撑腿上开设走线通道供走线,很好的解决机身底部与其它模块的走线问题,结构设计巧妙且稳定,适用范围广。
10.进一步,在一些可选的实施方式中,所述机身内设置有容纳腔,所述容纳腔的底部设置有第二开口,所述第二开口设置有第二内折;
11.所述连接座包括基座和设置在所述基座底部的若干支撑腿,所述基座的外缘设置有台阶部,所述台阶部与所述第二内折抵接。
12.进一步,所述第二内折和所述台阶部之间设置有防水垫。
13.进一步,所述台阶部和/或所述内折的底部设置有凹槽,所述防水垫设置在所述凹槽内。
14.进一步,所述第二内折和所述防水垫上设置有相互连通的定位通孔,
15.所述机器人的任务模块还包括固定片,所述固定片设置有凸出于所述固定片底部的定位凸起,所述固定片设置在所述第二内折上,所述定位凸起伸入所述第二内折和所述防水垫的定位通孔。
16.进一步,所述机器人的任务模块还包括若干支撑柱,所述支撑柱的底部与所述基座连接,其顶部与所述顶台连接。
17.进一步,所述第一开口处设置有第一内折;
18.所述顶台包括第一底板和第二底板,所述第一底板设置在所述容纳腔内,其顶部抵接所述第一内折的底部,所述第二底板设置在所述容纳腔外,其底部抵接所述第一内折的顶部,所述第一底板、所述第二底板和所述第一内折通过锁定件连接,所述支撑柱顶部与所述第一底板连接。
19.进一步,所述顶台还包括支撑架和顶台壳体,所述支撑架与所述第一底板连接,所述顶台壳体罩设在所述支撑架上,所述顶台壳体的侧壁设置有若干收音孔以及从所述收音孔露出的麦克风,所述麦克风位于所述顶台壳体内。
20.进一步,所述基座的底部设置有若干螺母槽、位于所述螺母槽的螺母和加强筋,所述加强筋与所述螺母槽的外壁连接,所述基座的顶部设置有支撑板,所述支撑板上设置有与所述螺母槽连通的限位孔;
21.所述支撑柱的底部通过穿过所述限位孔的螺杆和所述螺母来与所述支撑板连接。
22.为了能更清晰的理解本实用新型,以下将结合附图说明阐述本发明的具体实施方式。
附图说明
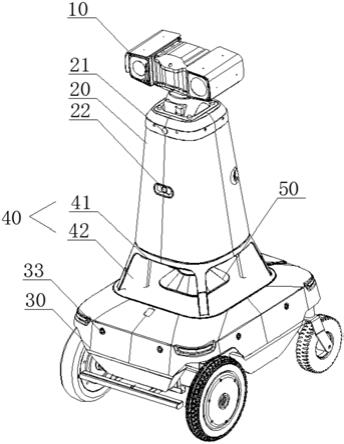
23.图1为本实用新型一个实施例的机器人的结构示意图;
24.图2为本实用新型一个实施例的底盘的结构示意图;
25.图3为本实用新型一个实施例的连接座的剖视图;
26.图4为图3所示的连接座的顶部结构示意图;
27.图5为本实用新型一个实施例的机身的结构示意图;
28.图6为本实用新型一个实施例的机身的剖视图;
29.图7为图6所示的a处的放大图;
30.图8为本实用新型另一个实施例的连接座的底部结构示意图;
31.图9为本实用新型另一个实施例的机身的剖视图;
32.图10为图9所示的b处的放大图;
33.图11为本实用新型一个实施例的固定片的结构示意图;
34.图12为本实用新型一个实施例的底盘在隐藏外壳时的结构示意图;
35.图13为图6所示的c处的放大图。
36.附图标记说明:
37.10-机头;
38.20-机身;21-第一探测器;22-摄像头;23-容纳槽;24-延伸部;25-容纳腔;251-第一内折;252-第二内折;2521-固定片;2522-定位凸起;26-顶台;261-第一底板;262-第二底板; 263-支撑架;264-顶台壳体;265-收音孔;27-支撑柱
39.30-底盘;31-穿线孔;32-定位卡接槽;33-第二探测器;34-骨架;341-中间支架;342
‑ꢀ
立柱;3421-螺纹柱;35-外壳;
40.40-连接座;41-基座;411-环形凸棱;412-环形凹槽;413-凸台;414-螺母槽;415-加强筋;416-支撑板;416-限位孔;418-台阶部;419-防水垫;42-支撑腿;421-走线通道;422
‑ꢀ
凸起部;423-安装槽;424-盖子;
41.50-探测雷达。
具体实施方式
42.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
43.请参阅图1,其是本实用新型一个实施例的机器人的结构示意图,该机器人,包括:机身20、设置于所述机身20顶部的机头10、设置于所述机身20底部的连接座40、设置在所述连接座40下方的底盘30以及探测雷达50。
44.所述连接座40与所述底盘30连接并与所述底盘30共同围成一收容空间,所述探测雷达 50位于所述收容空间内;所述连接座40包括基座41和设置在所述基座41底部的若干支撑腿42,所述基座41与所述机身20连接,所述支撑腿42与所述底盘30连接,请参阅图2,其是本实用新型一个实施例的底盘的结构示意图,所述底盘30与所述支撑腿42连接处设置有穿线孔31,所述支撑腿42内部设置有分别连通所述穿线孔31和所述机身20内部的走线通道421;所述探测雷达50布置在所述若干支撑腿42中间。走线通道421供从机身20到底盘30的电线等走线。另外,需要说明的是,支撑腿42可以是部分或全部设置有所述走线通道421。
45.请参阅图3,其是本实用新型一个实施例的连接座40的剖视图,在一些可选的实施方式中,所述支撑腿42底部设置有向下突出的凸起部422,所述底盘30上设置有定位卡接槽32,所述凸起部422卡入所述定位卡接槽32内。凸起部422起到对支撑腿42的定位作用,同时,在穿线时,当支撑腿42放置在所述底盘30上时,凸起部422起到支撑作用,避免压线,便于将线路伸入穿线孔31内。
46.请参阅图4,其是图3所示的连接座40的顶部结构示意图,在一些可选的实施方式中,所述基座41上端设置有向上凸起的环形凸棱411,所述环形凸棱411围绕形成一电器收容腔室;所述走线通道421顶部开口,所述开口位于所述电器收容腔室外,环形凸棱411可以起到防水的作用。
47.在一些可选的实施方式中,所述基座41上还设置有围绕所述环形凸棱411的环形凹槽 412,所述开口位于所述环形凹槽412内,环形凹槽412可以引导进入机身20内的水排入走线通道421内,从而不堆积在机身20内。需要说明的是,走线通道421内应留有穿线的部分和排水的部分。
48.在一些可选的实施方式中,所述环形凹槽412底面的水平高度在靠近所述走线通道顶部开口的方向上逐渐降低,利于引导水流向走线通道421。需要说明的是,可以仅是靠近所述走线通道顶部开口的所述环形凹槽412底面设计成在靠近所述走线通道顶部开口的方向上逐渐降低。
49.在一些可选的实施方式中,所述基座41顶部设置有凸台413,所述环形凸棱411在所述凸台413上,所述环形凹槽412围绕所述凸台413布置。凸台413起到稳定支撑电器收容腔室内的电器的作用,以及垫高电器收容腔室,防止水流入电器收容腔室。
50.在一些可选的实施方式中,所述机身20侧面设置有多个围绕所述机身20布置的第一探测器21,所述第一探测器21位于靠近所述机身20顶部的位置;所述机身20侧面还设置
有多个围绕所述机身20布置的摄像头22,所述摄像头22位于所述机身20的中部;所述底盘 30的侧面设置有多个围绕所述底盘30布置的第二探测器33。通过在机身顶部附近的第一探测器21检测机器人上部位置,通过摄像头22检测机器人中部位置,通过第二探测器33检测机器人下部位置,使得机器人对各个高度都具有针对性的探测,保证机器人的探测范围无死角,保障机器人稳定运行。
51.在一些可选的实施方式中,所述机身20上设置有3个摄像头22,均匀设置在所述机身 20侧面,所述摄像头22的拍摄角度大于等于120
°
。
52.请参阅图5,其是本实用新型一个实施例的机身的结构示意图,在一些可选的实施方式中,所述机身20的侧面设置有收容所述摄像头22的容纳槽23,所述容纳槽23的开口角度与所述摄像头22的拍摄角度相匹配。保护摄像头22免于雨水冲击等情况,也避免遮挡所述摄像头22的拍摄。
53.在一些可选的实施方式中,所述机身20上设置有凸出于所述机身20侧面的延伸部24,所述延伸部24朝所述摄像头22的朝向延伸,所述延伸部24平滑过渡至所述机身20的侧面;所述摄像头22至少部分设置在所述延伸部24上。延伸部24通过支撑其摄像头22,保证摄像头22能够朝向正确的角度。
54.在一些可选的实施方式中,所述机身20上设置有2个所述第一探测器21,所述第一探测器21分别位于所述机身20前后两侧面。
55.在一些可选的实施方式中,所述第一探测器21和所述第二探测器33均为超声波探测器。当然,根据需要也可选择其它合适的探测器,例如微波探测器等。
56.请参阅图6,其是本实用新型一个实施例的机身的剖视图,在一些可选的实施方式中,所述机身20内设置有容纳腔25,所述容纳腔25的底部设置有第一开口,其顶部设置有第二开口;所述机身20设置有位于所述机身20顶部的顶台26和位于所述机身20内的若干支撑柱27,所述顶台26设置在所述第二开口处,所述支撑柱27的底部穿过所述第一开口与所述基座41连接,其顶部与所述顶台26连接;所述机头10设置在所述顶台26上。该结构稳定支撑机身20上方的其它部件,例如机头10等。优选的,设置有第一探测器21时,所述第一探测器21设置在所述顶台26的侧面,保证第一探测器21的覆盖位置。不设置有第一开口时,支撑柱27可直接穿过机身20底部与基座41连接。在本实施例中,支撑柱为3根。
57.请参阅图7,其是图6所示的a处的放大图,在一些可选的实施方式中,所述第一开口处设置有第一内折251;所述顶台26包括第一底板261和第二底板262,所述第一底板261 设置在所述容纳腔25内,其顶部抵接所述第一内折251的底部,所述第二底板262设置在所述容纳腔25外,其底部抵接所述第一内折251的顶部,所述第一底板261、所述第二底板262 和所述第一内折251通过锁定件连接,所述支撑柱27顶部与所述第一底板261连接。该结构使得顶台26与机身20稳定连接。需要说明的是,锁定件可根据实际需要来选择,例如,锁定件可以是穿过所述第一底板261、所述第二底板262和所述第一内折251的螺栓,也可是其它卡扣等锁定形式。
58.在一些可选的实施方式中,所述顶台26还包括支撑架263和顶台壳体264,所述支撑架 263与所述第一底板261连接,所述顶台壳体264罩设在所述机身20顶部,与所述支撑架263 连接,所述顶台壳体264的侧壁设置有若干收音孔265以及从所述收音孔265露出的麦克风,所述麦克风位于所述顶台壳体264内。麦克风设置在该位置能有足够的高度,便于
人机交互。
59.请参阅图8,其是本实用新型另一个实施例的连接座40的底部结构示意图,在一些可选的实施方式中,所述基座41的底部设置有若干螺母槽414、位于所述螺母槽414的螺母和加强筋415,所述加强筋415与所述螺母槽414的外壁连接,所述基座41的顶部设置有支撑板 416,所述支撑板416上设置有与所述螺母槽414连通的限位孔417;所述支撑柱27的底部通过穿过所述限位孔417的螺杆和所述螺母来与所述支撑板416连接。支撑板416保证足够的厚度稳定支撑所述支撑柱27,加强筋415提高支撑柱27与基座41连接处的稳定性。
60.请参阅图9和图10,其分别是本实用新型另一个实施例的机身的剖视图和图9所示的b 处的放大图,在一些可选的实施方式中,所述机身20内设置有容纳腔25,所述容纳腔25的底部设置有第二开口,所述第二开口设置有第二内折252;所述基座41的外缘设置有台阶部 418,所述台阶部418与所述第二内折252抵接。该设计能防止水流入机身20内。
61.在一些可选的实施方式中,所述第二内折252和所述台阶部418之间设置有防水垫419。防水垫419可根据实际需要来选择,优选采用具有弹性的,例如防水泡棉。
62.在一些可选的实施方式中,所述台阶部418和/或所述内折的底部设置有凹槽,所述防水垫419设置在所述凹槽内。
63.请参阅图11,其是本实用新型一个实施例的固定片的结构示意图,在一些可选的实施方式中,所述第二内折252和所述防水垫419上设置有相互连通的定位通孔;所述第二内折252 上设置有所述固定片2521,所述固定片2521设置有凸出于所述固定片2521底部的定位凸起2522,所述定位凸起2522伸入所述第二内折252和所述防水垫419的定位通孔。需要说明的是,定位凸起2522的形状可是圆柱状、棱柱状等,定位凸起2522上还可设置有供螺栓通过的孔,使得定位凸起2522可与台阶部418螺纹连接,实现进一步固定。
64.请参阅图12,其是本实用新型一个实施例的底盘在隐藏外壳时的结构示意图,在一些可选的实施方式中,所述底盘30包括骨架34和设置在所述骨架34上的外壳35,所述骨架34 上设置有镂空部,所述穿线孔31位于所述外壳35上,其至少部分位于所述镂空部的正上方。需要说明的是,走线通道421内应留有穿线的部分和排水的部分,排水部分与镂空部对应,使得从走线通道421经过的水从镂空部流出至机器人外。
65.在一些可选的实施方式中,所述骨架34包括中间支架341和设置在所述中间支架341上的若干根立柱342,每根立柱342的顶部向上设有螺纹柱3421,所述外壳35上设置有定位孔,所述立柱342支撑于所述外壳35下方,所述立柱342顶部的螺纹柱3421穿过所述外壳35上的定位孔,所述支撑腿42设置有与所述螺纹柱3421配合的定位部,所述定位部通过连接座 40与所述螺纹柱3421固定。该结构稳定支撑机身20和机头10部分。
66.请参阅图13,其是图6所示的c处的放大图,在一些可选的实施方式中,所述定位部包括安装槽423、设置在所述安装槽423内的螺母以及活动设置在所述安装槽423的槽口处盖子424,所述螺纹柱3421穿过所述支撑腿42与所述螺母螺纹连接。便于支撑腿42的拆装以及保护支撑腿42和底盘30的连接处。
67.在一些可选的实施方式中,所述连接座40包括4个支撑腿42,所述支撑腿42均匀围绕所述探测雷达50布置。当然支撑腿42的数量可以根据实际需要来改变。
68.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修
改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。