1.本发明涉及轨道机器人领域,特别是涉及有轨机器人的轨道基座。
背景技术:
2.目前,针对发电厂或矿井下的日常巡检工作,通常需要安排人工。这项工作重复性强且耗时费力,属于劳动密集型的工作。特别是对于一些环境恶劣,机械性高的巡检场合,对工人身体可能产生不利影响。然而随着用人成本的上升和技术的发展迭代,现在越来越多的企业在特定的巡检线路上,趋向于采用有轨机器人来取代人工进行巡检。但对于一些巡检场景来说,除了需要安装摄像头之外,可能还需要搭载红外热成像仪和多种传感器等。因此整机重量是比较高的。这对有轨机器人的部署提出了更高的要求,尤其是针对吊轨式有轨机器人来说,较大的负重,可能产生安全隐患。现有的简单吊装固定方式,稳定性欠佳。
技术实现要素:
3.鉴于现有技术存在的上述问题,本发明的目的是提供一种能够起稳定支撑作用的有轨机器人的轨道基座。
4.为了实现上述目的,本发明一个方面提供的有轨机器人的轨道基座,由于针对有轨机器人的轨道进行支撑,该有轨机器人包括一行走机构和悬挂设置在所述行走机构上的图像采集装置,所述行走机构包括外壳和设置在所述外壳内的电机及传动机构,所述轨道基座包括竖直向的吊杆和水平向的连接在所述吊杆上的横向支撑杆,所述横向支撑杆的两端连接固定两根平行的所述轨道,所述轨道上挂载设置有所述行走机构。
5.作为优选,所述行走机构的所述外壳的相对两侧,各设置有第一侧向支撑板和第二侧向支撑板,所述第一侧向支撑板和所述第二侧向支撑板的顶端分别设置有滚动装配在所述轨道上的负重轮。
6.作为优选,所述轨道包括轨道本体和嵌设于所述轨道本体上的滑杆,所述负重轮压覆在所述滑杆上。
7.作为优选,所述负重轮通过固定螺栓分别吊装固定在所述第一侧向支撑板和所述第二侧向支撑板上。
8.作为优选,所述固定螺栓上垫设有减震用碟簧。
9.作为优选,所述轨道的所述轨道本体的相对外侧,设置有滑槽,所述第一侧向支撑板及所述第二侧向支撑板上,各设置有引导轮机构,所述引导轮机构上固定有滑动设置在所述滑槽内的引导轮。
10.作为优选,所述传动机构包括连接在所述电机的输出轴上的减速机,所述减速机的输出端,设置有第一链轮,所述外壳上,同轴设置有第二链轮和第三链轮,所述第二链轮与所述第一链轮传动连接,所述第三链轮与设置在所述第二侧向支撑板上的传动链条啮合。
11.作为优选,所述壳体内设置有一转盘,所述转盘上沿竖直向设置有一升降气缸,所
述图像采集装置设置在所述升降气缸的末端。
12.作为优选,所述图像采集装置通过法兰盘与所述升降气缸连接。
13.作为优选,所述固定螺栓与所述第一侧向支撑板和/或所述第二侧向支撑板之间,设置有调整垫板。
14.本发明提供的有轨机器人的轨道基座,可对轨道机器人实现稳定支撑,尤其是针对负载较重的情况下,可保持轨道机器人长期稳定运行,降低故障率,节省维护成本。
附图说明
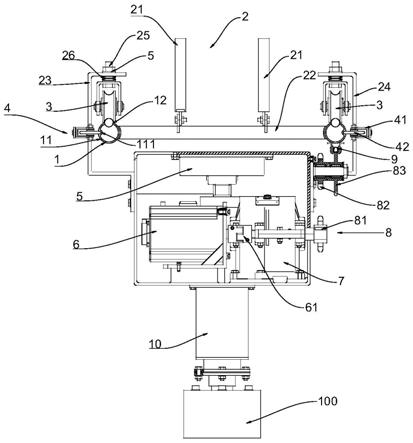
15.图1为本发明的有轨机器人的轨道基座的结构示意图(包含轨道机器人)。
16.图2为本发明的有轨机器人的轨道基座的另一视角的局部剖视结构示意图。
17.附图标记:
18.1-轨道;2-轨道基座;3-负重轮;4-引导轮机构;5-转盘;6-电机;7-减速机;8-链轮传动机构;9-传动链条;10-升降气缸;11-轨道本体;12-滑杆;21-吊杆;22-横向支撑杆;23-第一侧向支撑板;24-第二侧向支撑板;25-固定螺栓;26-碟簧;41-固定架;42-引导轮;61-输出轴;81-第一链轮;82-第二链轮;83-第三链轮;100-图像采集装置;111-滑槽;251-调整垫板。
具体实施方式
19.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
20.此处参考附图描述本发明的各种方案以及特征。
21.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
22.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都位于借此所限定的保护范围内。
23.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
24.如图1和图2所示,本发明一个实施例提供的本发明一个方面提供的有轨机器人的轨道基座,由于针对有轨机器人的轨道1进行支撑,该有轨机器人包括一行走机构(图中未标注)和悬挂设置在所述行走机构上的图像采集装置100,该图像采集装置100一般可为高清摄像头,所述行走机构包括外壳(图中未标注)和设置在所述外壳内的电机6及传动机构(图中未标注),所述轨道基座包括竖直向的吊杆21和水平向的连接在所述吊杆21上的横向支撑杆22,所述横向支撑杆22的两端连接固定两根平行的所述轨道1,所述轨道1上挂载设置有所述行走机构。通过吊杆21配合两根横向支撑板22,可以对轨道起到稳定的悬挂支撑作用。在一些实施例中,为了取得更好的支撑效果,所述行走机构的所述外壳的相对两侧,各设置有第一侧向支撑板23和第二侧向支撑板24,所述第一侧向支撑板23和所述第二侧向支撑板24的顶端分别设置有滚动装配在所述轨道1上的负重轮3。其中,具体来说,所述传动机构包括连接在所述电机6的输出轴61上的减速机7,所述减速机7的输出端,设置有链轮传
动机构8,该链轮传动机构8包括第一链轮81,所述外壳上,同轴设置有第二链轮82和第三链轮83,所述第二链轮82与所述第一链轮81传动连接,所述第三链轮83与设置在所述第二侧向支撑板24上的传动链条9啮合。而所述壳体内设置有一转盘5,用于对图像采集装置100的方向进行调节,所述转盘100上沿竖直向设置有一升降气缸10,所述图像采集装置100设置在所述升降气缸10的末端。在一种连接方式中,所述图像采集装置100可通过法兰盘与所述升降气缸10连接。
25.更具体地,在本发明中,为了与轨道基座更好地配合,如图1所示,所述轨道1包括轨道本体11和嵌设于所述轨道本体11上的滑杆12,所述负重轮3压覆在所述滑杆12上。而进一步地,所述负重轮可通过固定螺栓25分别吊装固定在所述第一侧向支撑板23和所述第二侧向支撑板24上。并且,为了防止工作期间的振动对轨道基座产生影响,所述固定螺栓25上可垫设有减震用碟簧26。并且,在一些改进方案中,还可在所述固定螺栓25与所述第一侧向支撑板23和/或所述第二侧向支撑板24之间,设置有调整垫板251。
26.再进一步地,作为优选,所述轨道1的所述轨道本体11的相对外侧,还可设置有滑槽111,所述第一侧向支撑板23及所述第二侧向支撑板24上,各设置有引导轮机构4,所述引导轮机构4上通过固定架41固定有滑动设置在所述滑槽111内的引导轮41,该引导轮41除可对行走机构的行走方向起到约束引导作用之外,还可记住第一侧向支撑板23和第二侧向支撑板24对有轨机器人起到辅助支撑的作用。
27.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。