1.本发明涉及支撑机构,特别是一种清仓机器人的柔性臂的支撑机构。
背景技术:
2.传统的煤炭存储装置大都为垂直筒状煤仓,煤仓顶部结构为缩口的锥形放煤口。筒仓作为贮存和周转物料的设施,具有使用方便灵活性强、能有效解决短时间需求增加等优点,多年来伴随着我国经济的发展和科技的进步,不仅是在煤炭行业,在粮食储存、冶金到电力等各个行业都有着广泛的应用。煤仓作为原煤存储的主要装置,在生产中不断有新的原煤加入和底部原煤经仓底转载机输送到皮带运输机。井下煤仓在长期使用过程中,仓壁面便会凝结一定量的原煤形成牢固的凝结物。这些凝结物的存在,一方面使煤流产生阻滞,同时也使煤仓的储存量大大减少了;此外凝结物掉落砸伤仓底检修工人的事情也时有发生,所以给检修工作增加了很大的风险。为防止隐患的发生,必须定期对煤仓进行清仓铲除凝结煤。清仓机器人是特种机器人的一种,用以代替人工进行壁面的清理和维护的工作。国内处已有不少学者投入到煤仓积煤清理装置的研制中,很多清理积煤的方案被提出。例如工作臂可伸缩的清仓机器人方案、高压水射流方案、摆动式铲斗方案、伸入式螺旋清仓方案等,这些方案大多都采用刚性连接机械臂,质量重、自由度少、对空间非结构环境适应能力弱。因此,目前也有存在一些方案来使用柔性臂来作为工作臂。但是,柔性臂支撑性弱,需要依赖支撑结构来进行作业,目前尚未有相对较完美的解决方案。
技术实现要素:
3.鉴于现有技术存在的上述问题,本发明的一个方面的目的是提供一种可对清仓机器人的柔性臂进行稳定支撑的清仓机器人的柔性臂的支撑机构。
4.为了实现上述目的,本发明一个方面提供的清仓机器人的柔性臂的支撑机构,包括支撑臂和用于固定所述支撑臂的连接座,其中,所述支撑臂包括相互依次铰接的第一支撑臂、第二支撑臂和第三支撑臂,所述第三支撑臂的自由端,设置有一用于固定所述柔性臂末端的作业部的端部固定件;所述第一支撑臂、第二支撑臂和/或所述第三支撑臂上,设置有用于承托所述柔性臂的套环。
5.作为优选,所述第一支撑臂与所述第二支撑臂的铰接轴的延伸方向,与所述第二支撑臂与所述第三支撑臂的铰接轴的延伸方向不同,以使所述第二支撑臂绕其与所述第一支撑臂的铰接点转动时的转动方向,与所述第二支撑臂绕其与所述第三铰接臂的铰接点转动时的转动方向不同。
6.作为优选,所述第一支撑臂与所述第二支撑臂通过销钉铰接,所述第二支撑臂与所述第三支撑臂通过第一铰接座铰接。
7.作为优选,所述第一铰接座包括第一铰接座本体和成型在所述第一铰接座本体上的第一夹持臂和第二夹持臂,所述第一铰接臂本体与所述第三支撑臂连接,所述第一夹持臂和所述第二夹持臂铰接在所述第二支撑臂上。
8.作为优选,还包括与所述第三支撑臂铰接的第四支撑臂,且所述第四支撑臂与所述第三支撑臂通过第二铰接座连接,所述端部固定件设置在所述第四支持臂的端部。
9.作为优选,所述端部固定件通过端座连接在所述第四铰接臂上。
10.作为优选,所述第三支撑臂包括平行设置的第一杆体和第二杆体,所述第一杆体和所述第二杆体之间设置有第一伸缩杆,所述第一伸缩杆的一端与所述第三支撑臂铰接,另一端与所述第二支撑臂铰接。
11.作为优选,所述第四支撑臂包括平行设置的第三杆体和第四杆体,所述第三杆体与所述第四杆体之间设置有第二伸缩杆,所述第二伸缩杆的一端与所述第四支撑臂铰接,另一端与所述第三支撑臂铰接。
12.作为优选,所述支撑臂通过第三铰接座与所述连接座连接。
13.作为优选,所述第一支撑臂由多段构成且由连接法兰连接。
14.本发明提供的清仓机器人的柔性臂的支撑机构,可通过多个相互铰接的支撑臂,对清仓机器人的柔性臂,起到稳定支撑的作用。且各个支撑臂之间铰接连接方式,使得柔性臂仍可在一定范围内活动调节。
附图说明
15.图1为本发明的清仓机器人的柔性臂的支撑机构的结构示意图。
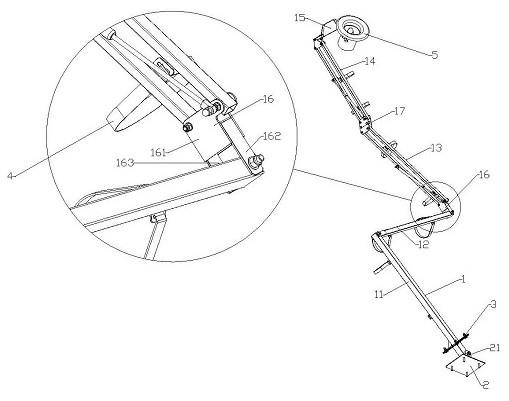
16.图2为本发明的清仓机器人的柔性臂的支撑机构的另一视角的结构示意图(包括局部放大视图)。
17.图3为本发明的清仓机器人的柔性臂的支撑机构的再一视角的结构示意图(包括局部放大视图)。
18.主要附图标记说明:1-支撑臂;2-连接座;3-连接法兰;4-套环;5-端部固定件;6-第一伸缩杆;7-第二伸缩杆;11-第一支撑臂;12-第二支撑臂;13-第三支撑臂;14-第四支撑臂;15-端座;16-第一铰接座;17-第二铰接座;21-第三铰接座;131-第一杆体;132-第二杆体;141-第三杆体;142-第四杆体;161-第一铰接座本体;162-第一夹持臂;163-第二夹持臂。
具体实施方式
19.为使本领域技术人员更好的理解本发明的技术方案,下面结合附图和具体实施方式对本发明作详细说明。
20.此处参考附图描述本发明的各种方案以及特征。
21.通过下面参照附图对给定为非限制性实例的实施例的优选形式的描述,本发明的这些和其它特性将会变得显而易见。
22.还应当理解,尽管已经参照一些具体实例对本发明进行了描述,但本领域技术人员能够确定地实现本发明的很多其它等效形式,它们具有如权利要求所述的特征并因此都位于借此所限定的保护范围内。
23.当结合附图时,鉴于以下详细说明,本发明的上述和其他方面、特征和优势将变得更为显而易见。
24.如图1至图3所示,本发明一个方面提供的清仓机器人的柔性臂(图中未示出)的支
撑机构,包括支撑臂1和用于固定所述支撑臂1的连接座2,在本实施例中,所述支撑臂1通过第三铰接座21与所述连接座2连接。其中,所述支撑臂1包括相互依次铰接的第一支撑臂11、第二支撑臂12和第三支撑臂13,所述第三支撑臂13的自由端,设置有一用于固定所述柔性臂末端的作业部(图中未示出)的端部固定件5;所述第一支撑臂11、第二支撑臂12和/或所述第三支撑臂13上,设置有用于承托所述柔性臂的套环4。且在本实施例中,所述第一支撑臂11由多段构成且由连接法兰3连接。
25.具体地,套环4可设置有多个,柔性臂可穿设在所述套环4内,并通过端部固定件5固定作业部,例如用于破碎凝结煤的破碎头(图中未示出)。
26.如图2和图3所示,具体地,在这一实施例中,所述第一支撑臂11与所述第二支撑臂12的铰接轴的延伸方向,与所述第二支撑臂12与所述第三支撑臂13的铰接轴的延伸方向不同,以使所述第二支撑臂12绕其与所述第一支撑臂11的铰接点转动时的转动方向,与所述第二支撑臂12绕其与所述第三铰接臂13的铰接点转动时的转动方向不同。这样,可以避免支撑机构在对柔性臂进行支撑时,各个铰接点之间发生偏移,影响支撑效果。这一结构的基础上,进一步地,所述第一支撑臂11与所述第二支撑12臂通过销钉(图中未标注)铰接,所述第二支撑臂12与所述第三支撑臂13通过第一铰接座16铰接。通过所述第一铰接座16进行铰接,想相较于销钉铰接方式,具有更好的稳定性,便于控制,在一些实现方式中,所述第一铰接座16包括第一铰接座本体161和成型在所述第一铰接座本体161上的第一夹持臂162和第二夹持臂163,所述第一铰接臂本体161与所述第三支撑臂13连接,所述第一夹持臂162和所述第二夹持臂163铰接在所述第二支撑臂12上。
27.另外,在另一些实施例中,如图2和图3所示,还包括与所述第三支撑臂13铰接的第四支撑臂14,且所述第四支撑臂14与所述第三支撑臂13通过第二铰接座17连接,所述端部固定件5设置在所述第四支持臂14的端部。更具体来说,所述端部固定件5通过端座连15接在所述第四铰接臂14上。
28.再者,为了便于控制支撑角度,如图2和图3所示,所述第三支撑臂13包括平行设置的第一杆体131和第二杆体132,所述第一杆体131和所述第二杆体132之间设置有第一伸缩杆6,所述第一伸缩杆6的一端与所述第三支撑臂13铰接,另一端与所述第二支撑臂12铰接。基于同样的设计,所述第四支撑臂14可包括平行设置的第三杆体141和第四杆体142,所述第三杆体141与所述第四杆体142之间设置有第二伸缩杆7,所述第二伸缩杆7的一端与所述第四支撑臂14铰接,另一端与所述第三支撑臂13铰接。
29.以上实施例仅为本发明的示例性实施例,不用于限制本发明,本发明的保护范围由权利要求书限定。本领域技术人员可以在本发明的实质和保护范围内,对本发明做出各种修改或等同替换,这种修改或等同替换也应视为落在本发明的保护范围内。