1.本实用新型涉及物流领域,具体涉及一种用于多形状货物抓取的无人机配送装置。
背景技术:
2.总的来说,配送是物流活动中一种非单一的业务形式,它与商流、物流、资金流紧密结合,并且主要包括了商流活动、物流活动和资金流活动,可以说他是包括了物流活动中大多数必要因素的一种业务形式。从物流来讲,配送几乎包括了所有的物流功能要素,是物流的一个缩影或在某小范围中物流全部活动的体现。一般的配送集装卸、包装、保管、运输于一身,通过这一系列活动完成。
3.传统技术存在以下技术问题:
4.传统的配送方式在某些地区难以普及,也比较浪费人力物力。为了弥补传统配送的不足,再加上无人机相关技术的完善,无人机配送作为一种新兴的配送方式正逐渐进入人们的视线,有一些企业也已进行了无人机配送的相关尝试。部分无人机配送是通过固定在无人机下方的机械手实现的。但是,现有的无人机机械手只能抓取一种形状的物体,功能单一。
技术实现要素:
5.本实用新型要解决的技术问题是提供一种用于多形状货物抓取的无人机配送装置,可以抓住多种形状的物体,功能多样化。
6.为了解决上述技术问题,本实用新型提供了一种用于多形状货物抓取的无人机配送装置,包括:支撑主体和机械手组件;所述支撑主体包括联接上板和若干装配围挡,若干所述装配围挡首尾相连从而围成一个封闭框;所述联接上板用于固定在所述无人机的底部;所述机械手组件包括若干机械手,所述装配围挡的数量和所述机械手的数量相同;所有机械手分为第一机械手和第二机械手两类,所述第一机械手用于抓取第一形状的物体,所述第二机械手用于抓取第二形状的物体;所述第一机械手和所述第二机械手固定在所述装配围挡侧面上。
7.本实用新型的有益效果:
8.可以抓住多种形状的物体,功能多样化。具体而言:所有机械手分为第一机械手和第二机械手两类,所述第一机械手用于抓取第一形状的物体,所述第二机械手用于抓取第二形状的物体。
9.在其中一个实施例中,所述第一机械手的数量为两个,两个所述第一机械手在空间相对设置;所述第二机械手的数量为两个,两个所述第二机械手在空间相对设置。
10.在其中一个实施例中,所有机械手还包括第三机械手,所述第三机械手的数量为两个,两个所述第三机械手在空间相对设置;所述第二机械手用于抓取第三形状的物体。
11.在其中一个实施例中,所述机械手包括抓取主体、动力电机、主动杆、左跟随杆、右
跟随杆、左抓取爪和右抓取爪;所述动力电机驱动所述主动杆旋转,所述主动杆的一端和所述左跟随杆铰接,所述主动杆的另一端和所述左跟随杆铰接;所述左跟随杆远离所述主动杆的一端和所述左抓取爪铰接,所述右跟随杆远离所述主动杆的一端和所述左抓取爪铰接;所述左抓取爪和所述抓取主体滑动配合,所述右抓取爪和所述抓取主体滑动配合。
12.在其中一个实施例中,所述第一机械手的所述左抓取爪靠近所述右抓取爪的一侧设有左弧形凹槽,所述第一机械手的所述右抓取爪靠近所述左抓取爪的一侧设有右弧形凹槽,所述左弧形凹槽和所述右弧形凹槽相对设置,所述左弧形凹槽和所述右弧形凹槽相互配合用于抓取圆柱状货物;所述第二机械手的所述左抓取爪与所述第二机械手的所述右抓取爪相互配合用于抓取长方形状货物;所述第三机械手的所述左抓取爪与所述第三机械手的所述右抓取爪相互配合用于抓取三角形状货物。
13.在其中一个实施例中,所有所述机械手形成圆周上的离散均匀分布,每两个相邻所述机械手构成的扇形圆心角两两相等。
14.在其中一个实施例中,所述联接上板的形状为正多边形,所述联接上板的边的数量和所述装配围挡的数量相同;所述联接上板设有围挡插入孔,所述围挡插入孔的数量和所述装配围挡的数量相同;所述联接上板上设有无人机固定孔,所述无人机固定孔的数量和所述装配围挡的数量相同,所述无人机固定孔位于所述围挡插入孔的内侧。
15.在其中一个实施例中,所有所述围挡插入孔形成圆周上的离散均匀分布,每两个相邻所述围挡插入孔构成的扇形圆心角两两相等;所有所述无人机固定孔形成圆周上的离散均匀分布,每两个相邻所述围挡插入孔构成的扇形圆心角两两相等。
16.在其中一个实施例中,所述装配围挡设有插入凸块,所述插入凸块插入到所述围挡插入孔内;所述插入凸块正好填满所述围挡插入孔。
17.在其中一个实施例中,所述装配围挡包括上框架和下框架;所述上框架的形状和所述下框架的形状相同,所述上框架为口字型,所述下框架为口字型;所述上框架的垂直投影和所述下框架的垂直投影重合,所述上框架的面积和所述下框架的面积相同。
附图说明
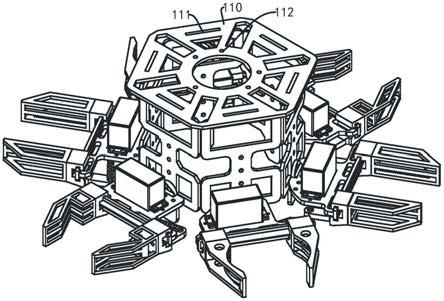
18.图1是本实用新型用于多形状货物抓取的无人机配送装置的结构示意图之一。
19.图2是本实用新型用于多形状货物抓取的无人机配送装置的结构示意图之二。
20.图3是图2的放大示意图。
21.图4是本实用新型用于多形状货物抓取的无人机配送装置中的装配围挡的结构示意图。
22.附图标记如下:110、联接上板;111、无人机固定孔;112、围挡插入孔;210、插入凸块;220、上框架;230、下框架;300、第一机械手;310、抓取主体;330、主动杆;340、左跟随杆;350、右跟随杆;360、左抓取爪;370、右抓取爪;361、左弧形凹槽;362、右弧形凹槽;300、第二机械手;300、第三机械手。
具体实施方式
23.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
24.参阅图1,一种用于多形状货物抓取的无人机配送装置,包括:支撑主体和机械手组件;所述支撑主体包括联接上板110和若干装配围挡,若干所述装配围挡首尾相连从而围成一个封闭框;所述联接上板110用于固定在所述无人机的底部;所述机械手组件包括若干机械手,所述装配围挡的数量和所述机械手的数量相同;所有机械手分为第一机械手300和第二机械手300两类,所述第一机械手300用于抓取第一形状的物体,所述第二机械手300用于抓取第二形状的物体;所述第一机械手300和所述第二机械手300固定在所述装配围挡侧面上。
25.可以抓住多种形状的物体,功能多样化。具体而言:所有机械手分为第一机械手300和第二机械手300两类,所述第一机械手300用于抓取第一形状的物体,所述第二机械手300用于抓取第二形状的物体。
26.具体地,所述第一机械手300的数量为两个,两个所述第一机械手300在空间相对设置;所述第二机械手300的数量为两个,两个所述第二机械手300在空间相对设置。
27.为了适应第三种形状的物体,所有机械手还包括第三机械手300,所述第三机械手300的数量为两个,两个所述第三机械手300在空间相对设置;所述第二机械手300用于抓取第三形状的物体。
28.参阅图2和图3,具体地,所述机械手包括抓取主体310、动力电机、主动杆330、左跟随杆340、右跟随杆350、左抓取爪360和右抓取爪370;所述动力电机驱动所述主动杆330旋转,所述主动杆330的一端和所述左跟随杆340铰接,所述主动杆330的另一端和所述左跟随杆340铰接;所述左跟随杆340远离所述主动杆330的一端和所述左抓取爪360铰接,所述右跟随杆350远离所述主动杆330的一端和所述左抓取爪360铰接;所述左抓取爪360和所述抓取主体310滑动配合,所述右抓取爪370和所述抓取主体310滑动配合。
29.三种机械手抓取的不同形状具体如下:所述第一机械手300的所述左抓取爪360靠近所述右抓取爪370的一侧设有左弧形凹槽361,所述第一机械手300的所述右抓取爪370靠近所述左抓取爪360的一侧设有右弧形凹槽362,所述左弧形凹槽361和所述右弧形凹槽362相对设置,所述左弧形凹槽361和所述右弧形凹槽362相互配合用于抓取圆柱状货物;所述第二机械手300的所述左抓取爪360与所述第二机械手300的所述右抓取爪370相互配合用于抓取长方形状货物;所述第三机械手300的所述左抓取爪360与所述第三机械手300的所述右抓取爪370相互配合用于抓取三角形状货物。
30.为了机械手分布地美观,所有所述机械手形成圆周上的离散均匀分布,每两个相邻所述机械手构成的扇形圆心角两两相等。
31.具体地,所述联接上板110的形状为正多边形,所述联接上板110的边的数量和所述装配围挡的数量相同;所述联接上板110设有围挡插入孔112,所述围挡插入孔112的数量和所述装配围挡的数量相同;所述联接上板110上设有无人机固定孔111,所述无人机固定孔111的数量和所述装配围挡的数量相同,所述无人机固定孔111位于所述围挡插入孔112的内侧。
32.参阅图4,更具体地,所有所述围挡插入孔112形成圆周上的离散均匀分布,每两个相邻所述围挡插入孔112构成的扇形圆心角两两相等;所有所述无人机固定孔111形成圆周上的离散均匀分布,每两个相邻所述围挡插入孔112构成的扇形圆心角两两相等。
33.为了方便装配围挡和联接上板110两者之间的固定,所述装配围挡设有插入凸块
210,所述插入凸块210插入到所述围挡插入孔112内;所述插入凸块210正好填满所述围挡插入孔112。
34.为了减轻装配围挡的重量采用镂空设计,具体如下:所述装配围挡包括上框架220和下框架230;所述上框架220的形状和所述下框架230的形状相同,所述上框架220为口字型,所述下框架230为口字型;所述上框架220的垂直投影和所述下框架230的垂直投影重合,所述上框架220的面积和所述下框架230的面积相同。
35.本装置最上方是联接上板110,作用是同时与无人机和各装配围挡相连接。联接上板110下方是装配围挡,其作用有两个,一是让机械手连接在其上,以达到固定的目的,二是让各个机械手隔开,给机械手足够的活动空间,防止工作时发生干涉。机械手用螺丝固定在对应的装配围挡上,机械手的抓取爪采用了不同形状的凹陷设计,一方面以增加抓紧时与物体的接触面积,提高摩擦力,防止抓握力度不够大导致货物滑落,另一方面凹陷设计可以防止运输时物体横向飞出的情况。凹陷采用不同形状也是为了适应形状不同的货物。
36.装配围挡的顶端设有插入凸块210与联接上板110的围挡插入孔112相匹配,使装配围挡可以插接在联接上板110上。装配围挡上有若干个圆孔,与机械手背部的螺孔相对应,使机械手可以通过螺丝固定在装配围挡上。多个螺孔使得机械手可以根据实际需要固定在合适的位置,在运输长度不同的货物时可能会发挥作用。与联接上板110相同,装配围挡也采取大面积镂空的设计来减轻重量。
37.以上所述实施例仅是为充分说明本实用新型而所举的较佳的实施例,本实用新型的保护范围不限于此。本技术领域的技术人员在本实用新型基础上所作的等同替代或变换,均在本实用新型的保护范围之内。本实用新型的保护范围以权利要求书为准。