1.本实用新型涉及机械手技术领域,特别涉及一种自动分拣机械手。
背景技术:
2.如今,随着科技日新月益的发展,越来越多的人工作业已逐渐被机械手所取代,机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,它可代替人的繁重劳动以实现生产的机械化和自动化,机械手臂的应用也将会越来越广泛。
3.当前市场上存在的机械手一般分为坐标式机械手和多轴式机械手,传统的坐标式机械手多存在着行程短、抓取灵活性不高、效率低等缺陷,已不能够满足当下所需;而多轴式机械手虽然灵活性较好,但是成本高、占用空间大,并不适用于一些特定使用场景。因此,有必要对现有技术予以改良以克服现有技术中的缺陷。
技术实现要素:
4.本实用新型所要解决的问题是提供一种自动分拣机械手,以克服现有机械手行程短、抓取灵活性不高、效率低、成本高以及占用空间大的缺陷。
5.本实用新型为了解决其技术问题所采用的技术方案是:一种自动分拣机械手,用于自动抓取货品并放置在外部对接设备上,以竖直方向为y轴向、水平左右方向为x轴向、以及同时垂直y轴向和x轴向的方向为z轴向,自动分拣机械手包括:
6.y轴滑移模组,安装在外部架体上;
7.x轴滑移模组,安装在所述y轴滑移模组上,由所述y轴滑移模组驱动沿y轴向往复移动;
8.z轴滑移模组,包括倍速机构和z轴驱动机构,所述倍速机构安装在所述x轴滑移模组上,由所述x轴滑移模组驱动沿x轴向往复移动;所述z轴驱动机构安装在所述倍速机构上,由所述倍速机构驱动沿z轴向往复移动;
9.机械手模组,用于抓取货品,安装在所述z轴驱动机构上,由所述z轴驱动机构驱动沿z轴向往复移动。
10.作为本实用新型的进一步改进,所述y轴滑移模组包括y轴驱动装置、y轴同步带机构和y轴滑轨,所述y轴滑轨沿y轴向布置,所述x轴滑移模组通过滑块滑配在所述y轴滑轨上并与所述y轴同步带机构连接,所述y轴驱动装置驱动所述y轴同步带机构转动带动所述x轴滑移模组在所述y轴滑轨上往复滑动。
11.作为本实用新型的进一步改进,所述x轴滑移模组包括x轴驱动装置、x轴同步带机构和x轴滑轨,所述x轴滑轨沿x轴向布置,所述z轴滑移模组通过滑块滑配在所述x轴滑轨上并与所述x轴同步带机构连接,所述x轴驱动装置驱动所述x轴同步带机构转动带动所述z轴滑移模组在所述x轴滑轨上往复滑动。
12.作为本实用新型的进一步改进,所述倍速机构包括z轴安装板、固定在所述z轴安
装板上的z轴驱动装置a、通过滑块滑配在所述z轴安装板上的z轴滑轨a、z轴同步带机构a和固定连接在所述z轴滑轨a上的z轴滑轨b与齿条,所述z轴驱动装置a上安装有齿轮,所述齿轮与所述齿条啮合,所述z轴同步带机构a安装在所述z轴滑轨a上并与所述z轴安装板连接,所述z轴驱动机构通过滑块滑配在所述z轴滑轨b上。
13.作为本实用新型的进一步改进,所述z轴驱动机构包括z轴驱动装置b、z轴同步带机构b和z轴滑轨c,所述z轴滑轨c沿z轴向布置,所述机械手模组通过滑块滑配在所述z轴滑轨c上并与所述z轴同步带机构b连接,所述z轴驱动装置b驱动所述z轴同步带机构b转动带动所述机械手模组在所述z轴滑轨c上往复滑动。
14.作为本实用新型的进一步改进,所述机械手模组包括夹爪气缸和安装在所述夹爪气缸上的两个夹爪,所述夹爪气缸驱动两个所述夹爪相对移动夹取货品。
15.作为本实用新型的进一步改进,所述机械手模组上安装有货品检测传感器。
16.本实用新型的有益效果是:
17.1、本实用新型提供一种自动分拣机械手,通过在y轴滑移模组、x轴滑移模组和z轴滑移模组的共同驱动下,使机械手模组能够沿y轴向、x轴向和z轴向移动至指定位置将货品抓取,不仅自动化程度高、占用空间小、成本低,而且具有很高的灵活性,能够满足特定使用场景所需;
18.2、z轴滑移模组包括倍速机构和z轴驱动机构,在倍速机构的齿轮齿条配合伸展下,同时通过z轴同步带机构a带动进一步伸展,具有三阶伸展功能,提高了机械手在z轴向上的行程,扩大了抓取范围;而且,倍速机构带动机械手模组移动时,其速度为齿条速度与z轴同步带机构a速度和,使机械手模组快速到达指定位置,大大缩短了取货时间,提高了工作效率。
附图说明
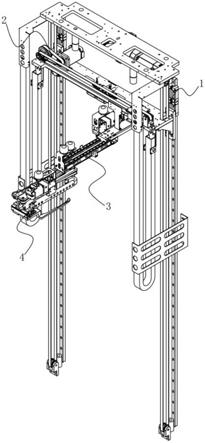
19.图1为本实用新型的立体图;
20.图2为本实用新型的主视图;
21.图3为本实用新型去除y轴滑移模组后的立体图;
22.图4为本实用新型z轴滑移模组和机械手模组的仰视图;
23.图5为本实用新型z轴滑移模组和机械手模组的主视图。
24.结合附图,作以下说明:
25.1——y轴滑移模组;
ꢀꢀꢀꢀꢀꢀꢀ
101——y轴驱动装置;
26.102——y轴同步带机构;
ꢀꢀꢀ
103——y轴滑轨;
27.2——x轴滑移模组;
ꢀꢀꢀꢀꢀꢀꢀ
201——x轴驱动装置;
28.202——x轴同步带机构;
ꢀꢀꢀ
203——x轴滑轨;
29.3——z轴滑移模组;
ꢀꢀꢀꢀꢀꢀꢀ
301——倍速机构;
30.3011——z轴安装板;
ꢀꢀꢀꢀꢀꢀ
3012——z轴驱动装置a;
31.3013——z轴滑轨a;
ꢀꢀꢀꢀꢀꢀꢀ
3014——z轴同步带机构a;
32.3015——z轴滑轨b;
ꢀꢀꢀꢀꢀꢀꢀ
3016——齿条;
33.3017——齿轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302——z轴驱动机构;
34.3021——z轴驱动装置b;
ꢀꢀꢀ
3022——z轴同步带机构b;
35.3023——z轴滑轨c;
ꢀꢀꢀꢀꢀꢀꢀ
4——机械手模组;
36.401——夹爪气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀ
402——夹爪;
37.5——检测传感器。
具体实施方式
38.以下结合附图,对本实用新型的较佳实施例作详细说明。
39.参阅图1至图5,本实用新型提供一种自动分拣机械手,用于自动抓取货品并放置在外部对接设备上。为了便于理解,定义以图2中竖直方向为y轴向、水平左右方向为x轴向、以及同时垂直y轴向和x轴向的方向为z轴向。自动分拣机械手包括:y轴滑移模组1、x轴滑移模组2、z轴滑移模组3和机械手模组4,机械手模组4在y轴滑移模组1、x轴滑移模组2和z轴滑移模组3的共同驱动下移动至指定位置,将货品抓取,再移动放置在外部对接设备上。
40.参阅图1和图2,y轴滑移模组1安装在外部架体上,y轴滑移模组1包括y轴驱动装置101、y轴同步带机构102、两个y轴滑轨103和y轴安装板,y轴滑轨103沿y轴向布置,y轴安装板连接在两个y轴滑轨103顶部,两个y轴滑轨103和y轴安装板均固定安装在外部架体上。y轴驱动装置101固定安装在y轴安装板上,y轴驱动装置101包括y轴伺服电机和安装在y轴伺服电机上的减速机,并在减速机上安装有主动轴,主动轴的一端与y轴同步带机构102的y轴同步轮连接。
41.参阅图2和图3,x轴滑移模组2安装在y轴滑移模组1上,由y轴滑移模组1驱动沿y轴向往复移动。x轴滑移模组2具有一x轴安装板,x轴安装板通过滑块滑配在两个y轴滑轨103上,并且x轴安装板通过同步带压板与y轴同步带机构102的y轴同步带连接。y轴驱动装置101驱动y轴同步带机构102转动带动x轴滑移模组2在y轴滑轨103上往复滑动。
42.参阅图3,x轴滑移模组2包括安装在x轴安装板上的x轴驱动装置201、x轴同步带机构202以及两个x轴滑轨203,x轴滑轨203沿x轴向布置。x轴驱动装置201包括x轴伺服电机和安装在x轴伺服电机上的减速机。x轴同步带机构202包括x轴主同步带机构和x轴从同步带机构,x轴主同步带机构包括x轴主动小同步轮、x轴主动大同步轮和x轴主同步带,x轴主动小同步轮安装在减速机上,通过x轴主同步带带动x轴主动大同步轮转动,x轴主动大同步轮与x轴从同步带机构的x轴从动同步轮同轴设置。
43.参阅图3和图4,z轴滑移模组3包括倍速机构301,倍速机构301安装在x轴滑移模组2上,由x轴滑移模组2驱动沿x轴向往复移动。倍速机构301具有一z轴安装板3011,z轴安装板3011通过滑块滑配在两个x轴滑轨203上,并且z轴安装板3011通过同步带压板与x轴从同步带机构的x轴从同步带连接。
44.参阅图4和图5,倍速机构301包括固定在z轴安装板3011上的z轴驱动装置a3012、两个z轴滑轨a3013、z轴同步带机构a3014、两个z轴滑轨b3015、齿条3016和滑轨安装板。两个z轴滑轨a3013、两个z轴滑轨b3015、齿条3016和z轴同步带机构a3014均沿z轴向安装在滑轨安装板上,并且z轴同步带机构a3014的z轴同步带a通过一同步带压板与z轴安装板3011连接。z轴安装板3011上固定安装有滑块,两个z轴滑轨a3013滑配在此滑块上。z轴驱动装置a3012包括安装在z轴安装板3011上的z轴伺服电机a和安装在z轴伺服电机a上的减速机,减速机上安装有齿轮3017,齿轮3017与齿条3016啮合。
45.z轴滑移模组3还包括z轴驱动机构302,z轴驱动机构302安装在倍速机构301上,由
倍速机构301驱动沿z轴向往复移动。z轴驱动机构302具有z轴第二安装板,z轴第二安装板通过滑块滑配在两个z轴滑轨b3015上,并且z轴第二安装板通过一同步带压板与z轴同步带机构a3014的z轴同步带a连接。z轴驱动机构302包括z轴驱动装置b3021、z轴同步带机构b3022和z轴滑轨c3023。z轴驱动装置b3021包括z轴伺服电机b和安装在z轴伺服电机b上的减速机,z轴同步带机构b3022的z轴同步轮b安装在减速机上。z轴滑轨c3023沿z轴向布置,机械手模组4通过滑块滑配在z轴滑轨c3023上,并且机械手模组4与z轴同步带机构b3022的z轴同步带b连接,z轴驱动装置b3021驱动z轴同步带机构b3022转动带动机械手模组4在z轴滑轨c3023上往复滑动。
46.参阅图5,机械手模组4包括夹爪气缸401和安装在夹爪气缸401上的两个夹爪402,夹爪气缸401驱动两个夹爪402相对移动夹取货品。
47.其中,机械手模组4上安装有货品检测传感器5,用于检测是否有货品存在。
48.本实施例工作原理为:
49.y轴滑移模组1动作:y轴伺服电机启动,依次带动减速机、主动轴、y轴同步轮使y轴同步带转动,带动x轴滑移模组2到达指定高度;
50.x轴滑移模组2动作:x轴伺服电机启动,依次带动减速机、x轴主动小同步轮、x轴主同步带、x轴主动大同步轮、x轴从动同步轮使x轴从同步带转动,带动z轴滑移模组3到达水平指定位置;
51.z轴滑移模组3动作;z轴伺服电机a和z轴伺服电机b启动,z轴伺服电机a依次带动其上的减速机、齿轮3017、齿条3016使z轴驱动机构302移动,同时带动z轴同步带机构a3014的z轴同步带a转动,进一步带动z轴驱动机构302移动;z轴伺服电机b依次带动其上的减速机、z轴同步轮b使z轴同步带b转动,带动机械手模组4到达货品所在位置;
52.检测传感器5检测有货品时,机械手模组4动作:夹爪气缸401驱动两个夹爪402相对移动夹取货品,再由y轴滑移模组1、x轴滑移模组2、z轴滑移模组3驱动移动放置在外部对接设备上;
53.检测传感器5检测无货品时,系统提示补充货品。
54.由此可见,本实用新型一种自动分拣机械手,通过在y轴滑移模组、x轴滑移模组和z轴滑移模组的共同驱动下,使机械手模组能够沿y轴向、x轴向和z轴向移动至指定位置将货品抓取,不仅自动化程度高、占用空间小,而且具有很高的灵活性,能够满足特定使用场景所需;z轴滑移模组包括倍速机构和z轴驱动机构,在倍速机构的齿轮齿条配合伸展下,同时通过z轴同步带机构a带动进一步伸展,具有三阶伸展功能,提高了机械手在z轴向上的行程,扩大了抓取范围;而且,倍速机构带动机械手模组移动时,其速度为齿条速度与z轴同步带机构a速度和,使机械手模组快速到达指定位置,大大缩短了取货时间,提高了工作效率。
55.在以上的描述中阐述了很多具体细节以便于充分理解本实用新型。但是以上描述仅是本实用新型的较佳实施例而已,本实用新型能够以很多不同于在此描述的其它方式来实施,因此本实用新型不受上面公开的具体实施的限制。同时任何熟悉本领域技术人员在不脱离本实用新型技术方案范围情况下,都可利用上述揭示的方法和技术内容对本实用新型技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本实用新型技术方案保护的范围内。