1.本实用新型涉及气动机器人领域,特别涉及一种气控式轴向伸缩驱动器。
背景技术:
2.近几年,随着材料、仿生学、科学技术的发展,柔性机器人越来越受到国内外学者的关注,传统的刚性机器人具有负载能力强、响应速度快、精度高的优点,但也存在结构复杂、控制难度高、灵活性差,在于人机交互过程中,存在其安全隐患;而柔性机器人可通过气动、化学能或者智能的材料驱动等驱动方式改变其驱动器的外形形状,以此来改变机器人的位姿和姿态,满足其工作要求,由于柔性机器人材料与驱动方式的特殊性,使其具有柔性大,稳定性、安全性较高等优点,已在诸多领域得到广泛的应用。
技术实现要素:
3.本实用新型提供一种柔性管道机器人伸缩执行器的气控式轴向伸缩驱动器,可实现在轴向方向上的伸长与收缩功能。
4.本实用新型的一种机器人用气控式轴向伸缩驱动器,其特征在于轴向伸缩驱动器外形如同波纹状结构,且在波纹处等角度设置有四根加强筋板,提升驱动器的轴向刚度,使其在中作中不易发生弯曲变形;轴向伸缩驱动器波纹内部设置有锥形气室,各气室通过气道相互连接,正压力气体作用于锥形气室内壁时,其侧壁发生弹性变形,可以实现轴向伸长收缩;轴向伸缩驱动器上下两端设置有锥形凸台,便于与外部构件相互配合连接。
5.所述气控式轴向伸缩驱动器锥形气室两侧壁厚较薄,其弹性变形能力较强,驱动器通入压缩气体后,锥形气室侧壁向外膨胀,使得相邻两波纹相互挤压,驱动器轴向伸长。
附图说明
6.下面结合附图和具体实施方式对本发明作进一步详细的说明:
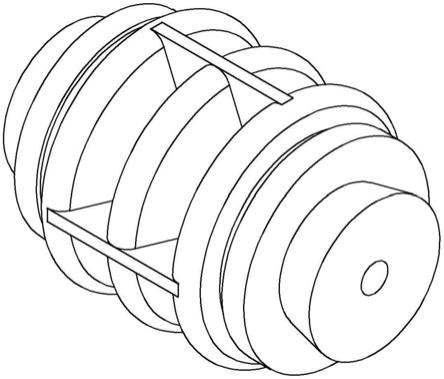
7.图1为气控式轴向伸缩驱动器正视图;
8.图2为气控式轴向伸缩驱动器轴测图;
9.图3为气控式轴向伸缩驱动器局部剖视图;
具体实施方式
10.本实用新型提供了一种气控式轴向伸缩驱动器,其外形形如波纹状结构2,且在相邻波纹结构处设置加强筋板3;每一波纹结构内部嵌入锥形气室6,每一锥形气室通过中间气道7相互串联,最后通过接口4与外部驱动源连接,在驱动器上下两端面设置有锥形凸台1,便于与外部构件相互配合连接。
技术特征:
1.一种气控式轴向伸缩驱动器,其特征在于:驱动器本体形如波纹状结构,且在相邻波纹结构处设置加强筋板,波纹处内部设置有锥形气室,驱动器上下端面设有锥形凸台。
技术总结
本实用新型公开了一种气控式轴向膨胀驱动器,其特征在于驱动器外形如同波纹状结构,且在波纹处等角度设置有四根加强筋板,提升驱动器的轴向刚度,使其在中作中不易发生弯曲变形;轴向伸缩驱动器波纹内部设置有锥形气室,各气室通过气道相互连接,正压力气体作用于锥形气室内壁时,其侧壁发生弹性变形,可以实现轴向伸长收缩;轴向伸缩驱动器上下两端设置有锥形凸台,便于与外部构件相互配合连接。该驱动器具有较好的柔顺性,且在工作中具有较好的缓冲能力。缓冲能力。缓冲能力。
技术研发人员:宋懋征 刘晓敏 田德宝 秦鹏 赵云伟
受保护的技术使用者:北华大学
技术研发日:2021.08.19
技术公布日:2022/1/21