1.本实用新型属于医疗护理器械技术领域,具体涉及一种可智能控制自由调节的肢体固定装置。
背景技术:
2.组织间隙过量的体液潴留称为水肿,通常指皮肤及皮下组织液体潴留,体腔内体液增多则称积液。根据分布范围,水肿可表现为局部性或全身性,全身性水肿时往往同时有浆膜腔积液,如腹水、胸腔积液和心包腔积液。
3.肢体水肿也是患者水肿的一普遍表现形式,其中包括:上肢水肿、下肢水肿。上肢水肿是上肢组织间液过多的结果,这种类型的水肿可能是单向性的也可能是双向性的,可以是逐渐或突然形成的。下肢水肿一般指下肢淋巴水肿,由于淋巴液回流障碍引起局部水肿,称为淋巴水肿。由于某些原因可导致淋巴液在皮下组织积聚,继而引起纤维增生,脂肪硬化,后期出现肢体肿胀。无论是上肢水肿还是下肢水肿,在肢体静止的时候会加重水肿,经常上举或运动则会减轻水肿。
4.在临床中,很大一部分肢体水肿患者长时间躺在床上,且肢体无法自由活动,会加重其肢体水肿的症状,不利于患者的康复治疗,需要一款能辅助患者抬升肢体运动的装置来改善临床中患者的康复治疗现状。
5.现有技术中提供有多种肢体抬升装置,但是此现有技术中的肢体抬升装置并非运用于肢体水肿领域,没有针对性,其辅助肢体抬升运动减轻水肿症状效果不明显,且操作使用不方便;其次,此现有技术中的肢体抬升装置,所能实现的肢体抬升运动较为简单的上下运动,其辅助肢体运动体位不全面,同样制约了最终的辅助治疗效果;在者,针对长期卧床的肢体水肿患者来说,其行动不便,需要他人通过辅助装置完成肢体抬升,对其照顾患者人员造成较大的工作负担。
技术实现要素:
6.为了解决上述技术问题,本实用新型设计了一种可智能控制自由调节的肢体固定装置,该装置针对患者上肢、下肢分别设计了可辅助肢体弯曲抬升的结构,以缓解长期卧水肿床患者肢体水肿症状,上肢抬升装置于上肢每个肢体段限位固定,并控制各个肢体段抬升、翻转,在关节处活动连接,最终实现上肢的多方位自由移动,下肢抬升装置则于先关节、踝关节处抬升肢体,实现下肢抬升以及伸缩运动,如此配套构成该装置整体,相较于传统的肢体抬升装置,该装置辅助肢体运动的形式更丰富,可多方位的辅助肢体运动,更贴合实际,整体肢体水肿症状减轻效果更佳;同时,该装置搭载远程控制系统,通过遥控器向控制箱传达执行命令,控制箱最终控制该装置运动构件工作,改变该装置的形态,即承载患者肢体实现多体位运动,如此,在实际实用中,只需将该装置套接于患者的肢体上,通过遥控调节其肢体运动形态即可,相较于传统操作形式而言,操作更方便,更高效,省时省力,减轻了相关工作人员的工作负担。也为医患人员的日常护理提供了便利。
7.为了达到上述技术效果,本实用新型是通过以下技术方案实现的:一种可智能控制自由调节的肢体固定装置,其特征在于,包括:后肢体支撑模块、前肢体支撑模块、手掌支撑块、手指牵拉器、膝关节支撑模块、轨道板、踝关节支撑器、遥控器;
8.所述后肢体支撑模块、前肢体支撑模块、手掌支撑块之间通过过渡带依次连接,分别抬升、翻转上肢大臂、小臂、手掌,所述手指牵拉器通过驱动杆连接于手掌支撑块一侧,牵拉患者手指,以此构成上肢抬升装置,所述手掌支撑块两侧通过驱动杆连接于前肢体支撑模块两侧可相较于前肢支撑模块水平转动;所述轨道板固定连接在可抬升膝关节的膝关节支撑模块一侧,踝关节支撑器可抬升踝关节,且滑动连接在轨道板上,以此构成下肢抬升装置;所述前肢体支撑模块设有可分析处理信息、控制驱动杆动作的控制箱,所述遥控器通过无线连接控制箱,传输驱动杆动作指令;
9.进一步的,所述后肢体支撑模块、前肢体支撑模块、膝关节支撑模块均设有底座、抬升块、驱动杆,所述驱动杆连接于底座和抬升块之间,驱动抬升板其实现抬升、翻转动作;
10.进一步的,所述后肢体支撑模块的驱动杆一端活动连接于后肢体支撑模块抬升块两侧的万向关节上,另一端固定连接在底座上;所述前肢体支撑模块的驱动杆分设两组,其一端分别活动连接于前肢体支撑模块抬升块两端外侧的万向关节上,所述于后肢体支撑模块远端的一组驱动杆另一端铰连接于底座上,于后肢体支撑模块近端的一组驱动杆另一端固定连接在底座上;所述控制箱固定设置在前肢体支撑模块的底座上;
11.进一步的,所述后肢体支撑模块、前肢体支撑模块的抬升块为截面呈圆弧形的长块状,所述该抬升块上固定连接有一端可拆卸连接于抬升块一侧,另一端固定连接于抬升块另一侧的第一固定带;
12.进一步的,所述所述膝关节支撑模块的抬升块为柱筒状,且上表面向两边延伸有带体,固定连接到膝关节支撑模块的底座上,膝关节支撑模块的驱动杆一端活动连接在该抬升块两侧,另一端固定连接在底座上;
13.进一步的,所述踝关节支撑器包括“t”型底座、固定连接在“t”型底座上的驱动杆以及固定连接在驱动杆上的承载块,所述该承载块上固定连接有第二固定带,该固定带一端可粘合或撕离该承载块一侧;所述轨道板上开设有“t”型滑轨,踝关节支撑器通过“t”型底座滑动连接于该“t”型滑轨内;
14.进一步的,所述手指牵拉器为多根拉杆一端固定连接于一点构成,所述该拉杆另一端铰连接有指环;所述手指牵拉器于连杆固定连接一端固定连接驱动杆;
15.进一步的,所述遥控器外部设有调节按钮,其内部固定设有红外发射器、第一微处理模块、第一电池模块,所述控制箱内固定设有红外接收器、第二微处理模块、第二电池模块,红外发射器发射红外信号由红外接收器接收实现遥控器和控制箱的无线连接,遥控传输信号;
16.本实用新型的有益效果是:
17.1、该装置针对患者上肢、下肢分别设计了可辅助肢体弯曲抬升的结构,以缓解长期卧水肿床患者肢体水肿症状,上肢抬升装置于上肢每个肢体段限位固定,并控制各个肢体段抬升、翻转,在关节处活动连接,最终实现上肢的多方位自由移动,下肢抬升装置则于先关节、踝关节处抬升肢体,实现下肢抬升以及伸缩运动,如此配套构成该装置整体,相较于传统的肢体抬升装置,该装置辅助肢体运动的形式更丰富,可多方位的辅助肢体运动,更
贴合实际,整体肢体水肿症状减轻效果更佳;
18.2、该装置搭载远程控制系统,通过遥控器向控制箱传达执行命令,控制箱最终控制该装置运动构件工作,改变该装置的形态,即承载患者肢体实现多体位运动,如此,在实际实用中,只需将该装置套接于患者的肢体上,通过遥控调节其肢体运动形态即可,相较于传统操作形式而言,操作更方便,更高效,省时省力,减轻了相关工作人员的工作负担。也为医患人员的日常护理提供了便利。
附图说明
19.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
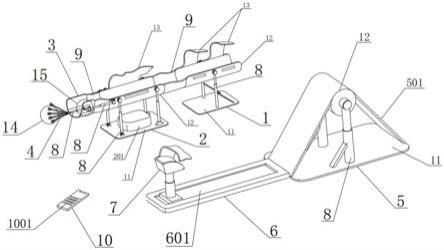
20.图1是一种可智能控制自由调节的肢体固定装置的整体结构示意图;
21.图2是一种可智能控制自由调节的肢体固定装置的踝关节支撑器及其附属结构示意图;
22.图3是一种可智能控制自由调节的肢体固定装置的遥控器内部结构示意图;
23.图4是一种可智能控制自由调节的肢体固定装置的控制箱内部结构示意图;
24.图5是附图1中部位14处的局部放大示意图;
25.图6是附图1中部位15处的局部放大示意图;
26.附图中,各标号所代表的部件列表如下:
27.1-后肢体支撑模块、2-前肢体支撑模块、201-控制箱,2021-红外接收器,2022-第二微处理模块,2023-第二电池模块,3-手掌支撑块、4-手指牵拉器、401-连杆,402-指环,5-膝关节支撑模块、501-带体,6-轨道板、601
‑“
t”型滑轨,7-踝关节支撑器、8-驱动杆,9-过渡带,10-遥控器,1001-调节按钮,1012-红外发射器,1013-第一微处理模块,1014-第一电池模块,11-底座,12-抬升块,13-第一固定带。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
29.实施例1
30.参阅图1至图6所示,一种可智能控制自由调节的肢体固定装置,其特征在于,包括:后肢体支撑模块1、前肢体支撑模块2、手掌支撑块3、手指牵拉器4、膝关节支撑模块5、轨道板6、踝关节支撑器7、遥控器10;
31.所述后肢体支撑模块1、前肢体支撑模块2、手掌支撑块3之间通过过渡带9依次连接,分别抬升、翻转上肢大臂、小臂、手掌,所述手指牵拉器4通过驱动杆8连接于手掌支撑块3一侧,牵拉患者手指,以此构成上肢抬升装置,所述手掌支撑块3两侧通过驱动杆8连接于前肢体支撑模块2两侧,可相较于前肢支撑模块2水平转动;所述轨道板6固定连接在可抬升
膝关节的膝关节支撑模块5一侧,踝关节支撑器7可抬升踝关节,且滑动连接在轨道板6上,以此构成下肢抬升装置;所述前肢体支撑模块2设有可分析处理信息、控制驱动杆8动作的控制箱201,所述遥控器10通过无线连接控制箱201,传输驱动杆8动作指令;整个装置通过后肢体支撑模块1、前肢体支撑模块2、手掌支撑块3、膝关节支撑模块5、踝关节支撑器7对患者上肢、下肢的支撑、辅助抬升运动能有效减轻患者的肢体水肿症状,且辅助调节状态较多,辅助运动范围较大,其效果更佳;
32.所述后肢体支撑模块1、前肢体支撑模块2、膝关节支撑模块5均设有底座11、抬升块12、驱动杆8,所述驱动杆8连接于底座11和抬升块12之间,驱动抬升块12其实现抬升、翻转动作;
33.所述后肢体支撑模块1的驱动杆8一端活动连接于后肢体支撑模块1的抬升块12两侧的万向关节上,另一端固定连接在其底座11上,驱动杆8能向上抬升抬升块,以此抬升患者肢体,辅助患者肢体运动;所述前肢体支撑模块2的驱动杆8分设两组,其一端分别活动连接于其抬升块12两端外侧的万向关节上,于后肢体支撑模块1远端的一组驱动杆8另一端铰连接于其底座11上,于后肢体支撑模块1近端的一组驱动杆8另一端固定连接在其底座11上,分别控制其两组驱动杆8动作,可实现其前后角度翻转的调节,实现肘关节处角度调节,同时控制两组驱动杆8动作可实现肢体的抬升;所述控制箱201固定设置在前肢体支撑模块2的底座11上;
34.所述后肢体支撑模块1、前肢体支撑模块1的抬升块12为截面呈圆弧形的长块状,方便肢体放入,所述该抬升块12上固定连接有一端可拆卸连接于抬升块一侧,另一端固定连接于抬升块另一侧的第一固定带13,用于束缚患者肢体;
35.所述所述膝关节支撑模块5的抬升块12为柱筒状,且上表面向两边延伸有带体501,固定连接到膝关节支撑模块5的底座11上,膝关节支撑模块5的驱动杆8一端活动连接在其抬升块12两侧,另一端固定连接在其底座11上,驱动杆8顶起抬升块12,抬升患者膝关节;
36.所述踝关节支撑器7包括“t”型底座701、固定连接在“t”型底座701上的驱动杆8以及固定连接在驱动杆8上的承载块702,所述该承载块702上固定连接有第二固定带703,该第二固定带703一端可粘合或撕离该承载块702的一侧;所述轨道板6上开设有“t”型滑轨601,踝关节支撑器7通过“t”型底座701滑动连接于该“t”型滑轨601内,在患者膝关节抬升时,踝关节支撑器7可随着患者膝关节向里侧收缩,整个踝关节支撑器7在驱动杆8的驱动下,可单独抬升踝关节;
37.所述手指牵拉器4为多根拉杆401一端固定连接于一点构成,所述该拉杆4另一端铰连接有指环402;所述手指牵拉器4于拉杆401固定连接一端固定连接驱动杆8,在驱动杆8拉动拉杆401是,拉杆401带动指环,指环则带动患者手指运动;
38.所述遥控器10外部设有调节按钮1001,其内部固定设有红外发射器1012、第一微处理模块1013、第一电池模块1014,所述控制箱201内固定设有红外接收器2021、第二微处理模块2022、第二电池模块2023,红外发射器1012发射红外信号由红外接收器2021接收实现遥控器10和控制箱201的无线连接,遥控传输信号;通过遥控器10便可实现该装置的远程调控,在实际实用中,只需将该装置套接于患者的肢体上,通过遥控调节其肢体运动形态即可,相较于传统操作形式而言,操作更方便,更高效,省时省力,减轻了相关工作人员的工作
负担。也为医患人员的日常护理提供了便利。
39.实施例2
40.本实用新型的又一实施例为一种可智能控制自由调节的肢体固定装置的工作原理:
41.整个装置中驱动杆8为该装置提供其运行的动力,且驱动杆8收控制箱201调控,由遥控器发射操控指令,具体如下:
42.调节按钮1001用于人为的输入操作指令,经第一微处理模块1013分析处理指令信息,再通过红外发射器1012将其指令信息以红外信号的形式传输至控制箱201,控制箱201中的红外接收器2021接收该红外信号,并将该红外信号传输至第二微处理模块2022分析处理,最终由第二微处理模块2022执行操作指令,控制相应的驱动杆8工作,调节该装置的形态,即辅助患者肢体运动;
43.调节按钮1001可单独对单个驱动杆8进行控制,也可对多个驱动杆8进行控制,例如,对前肢体支撑模块2中的前后两个驱动杆8、左右两根驱动杆8分别调控,实现其前后角度调节、左右翻转。
44.实施例3
45.本实用新型的又一实施例为一种可智能控制自由调节的肢体固定装置的具体使用方法、步骤:
46.1、将该装置两部分分别置于患者上肢处、下肢处。
47.2、将患者上肢由肩膀处以此放置入后肢体支撑模块、前肢体支撑模块、手掌支撑块上。
48.3、通过第一固定带固定将患者上肢体束缚于后肢体支撑模块、前肢体支撑模块上。
49.4、将患者手指插入指环中。
50.5、将患者膝关节放置于膝关节支撑模块上,将患者脚跟放置于换关节支撑器上,并通过第二固定带束缚患者踝关节。
51.6、通过遥控器针对该装置各个部位的驱动杆针对性发号指令。
52.综上所述,1、该装置针对患者上肢、下肢分别设计了可辅助肢体弯曲抬升的结构,以缓解长期卧水肿床患者肢体水肿症状,上肢抬升装置于上肢每个肢体段限位固定,并控制各个肢体段抬升、翻转,在关节处活动连接,最终实现上肢的多方位自由移动,下肢抬升装置则于先关节、踝关节处抬升肢体,实现下肢抬升以及伸缩运动,如此配套构成该装置整体,相较于传统的肢体抬升装置,该装置辅助肢体运动的形式更丰富,可多方位的辅助肢体运动,更贴合实际,整体肢体水肿症状减轻效果更佳;
53.2、该装置搭载远程控制系统,通过遥控器向控制箱传达执行命令,控制箱最终控制该装置运动构件工作,改变该装置的形态,即承载患者肢体实现多体位运动,如此,在实际实用中,只需将该装置套接于患者的肢体上,通过遥控调节其肢体运动形态即可,相较于传统操作形式而言,操作更方便,更高效,省时省力,减轻了相关工作人员的工作负担。也为医患人员的日常护理提供了便利。
54.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个
实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
55.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。