1.本发明属于医疗器械技术领域,尤其涉及一种骨科牵引装置。
背景技术:
2.骨科牵引是采用作用力与反作用力的原理,通过外加作用力对抗人体软组织的紧张和回缩,从而整复患者的骨折和脱位,骨科牵引还可以预防和矫正畸形。
3.现有的牵引装置,虽然增加了用于对患者大腿进行支撑的支撑件,但是支撑件与牵引件之间间距的调节步骤较为繁琐,且需要另外利用一个机构对牵引件的位置进行调节,装置的使用步骤较为繁琐,操作较为不便,为此我们提出一种骨科牵引装置。
技术实现要素:
4.本发明实施例的目的在于提供一种骨科牵引装置,旨在解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种骨科牵引装置,包括牵引件和支撑件,所述牵引件的一侧固定连接有滑座,还包括:
7.调节机构,所述调节机构包括控制件和旋转件,旋转件的输入端设有驱动件,控制件的输出端连接有齿轮,齿轮的两侧啮合连接有齿条一和齿条二,齿条一和齿条二均与旋转件活动啮合,壳体通过调节件二与滑动头转动连接,滑动头与滑座滑动连接,壳体通过调节件一与齿条三转动连接,齿条三的一侧活动啮合有传动轮,传动轮的一侧啮合连接有齿条四;所述调节件二带动滑动头移动,调节件一带动齿条三移动,控制件带动齿轮转动,齿轮带动齿条一和齿条二移动,驱动件带动旋转件转动,当滑动头与滑座滑动连接且齿条三未与传动轮啮合连接时,旋转件通过与齿条一啮合连接的方式带动壳体移动,壳体通过滑动头带动滑座滑动的方式带动牵引件移动;当齿条三与传动轮啮合连接且滑动头未与滑座滑动连接时,旋转件通过与齿条二啮合连接的方式带动壳体移动,壳体带动齿条三移动,齿条三通过传动轮带动齿条四反向移动,齿条四通过带动支撑件移动的方式调节支撑件与牵引件之间的间距。
8.进一步的,所述旋转件内开设有移动槽一和移动槽二。
9.进一步的,所述齿条一上固定连接有啮合头一,所述齿条二上固定连接有啮合头二,所述啮合头一与移动槽一活动啮合,所述啮合头二与移动槽二活动啮合。
10.进一步的,所述牵引件内设有放置位一,所述牵引件与固定座一转动连接,所述支撑件内设有放置位二,所述支撑件与固定座二转动连接,所述固定座一和固定座二通过连接座连接,所述固定座二与连接座滑动连接。
11.进一步的,所述固定座一的一侧并列设有滑座和滑动件,所述滑座内开设有滑槽,所述滑槽与滑动头滑动连接,所述滑动件与固定件滑动连接。
12.进一步的,还包括控制机构,所述控制机构包括控制件和按压件,所述控制件内滑
动连接有移动件二,所述移动件二内滑动连接有移动件一,所述移动件二与控制件的内壁之间设有弹性件,所述按压件穿过移动件二和移动件一并且与控制件滑动连接,所述移动件一的末端固定连接有抵接头。
13.进一步的,所述控制机构还包括固定齿轮,抵接头与固定齿轮活动抵接,所述固定齿轮与固定座一固定连接,所述控制件的侧壁转动连接有连接件二,所述连接件二的末端与牵引件的侧壁转动连接。
14.进一步的,所述连接座与底座之间设有第一伸缩件和第二伸缩件。
15.与现有技术相比,本发明的有益效果是:
16.该骨科牵引装置,通过设置调节件二、控制件和驱动件,配合滑动头、旋转件、调节件一和齿轮等组件,需要调节牵引件的位置时,调节件二带动滑动头朝靠近滑座的方向移动,直至滑动头与滑座滑动连接,调节件一带动齿条三朝远离传动轮的方向移动,齿条三与传动轮解除啮合关系,逆时针转动控制件,控制件带动齿轮逆时针转动,齿轮带动齿条一向下移动,齿条一与旋转件啮合,同时齿轮带动齿条二向上移动,驱动件带动旋转件转动,旋转件带动壳体移动,壳体带动滑动头移动,滑动头通过与滑座滑动连接的方式带动牵引件移动,从而能够根据具体情况调节患者双腿之间的间距,提高患者的使用体验;需要调节支撑件与牵引件之间的间距时,调节件二带动滑动头朝远离滑座的方向移动,滑动头与滑座滑动连接的关系解除,调节件一带动齿条三朝靠近传动轮的方向移动,齿条三与传动轮啮合连接,顺时针转动控制件,控制件带动齿轮顺时针转动,齿轮带动齿条一向上移动,同时齿轮带动齿条二向下移动,齿条二与旋转件啮合,驱动件带动旋转件转动,旋转件带动齿条三移动,齿条三通过传动轮带动齿条四反向移动,齿条四带动支撑件移动,进而能够调节支撑件与牵引件之间的间距,从而能够根据患者腿的长度对装置进行调节,较为实用。
附图说明
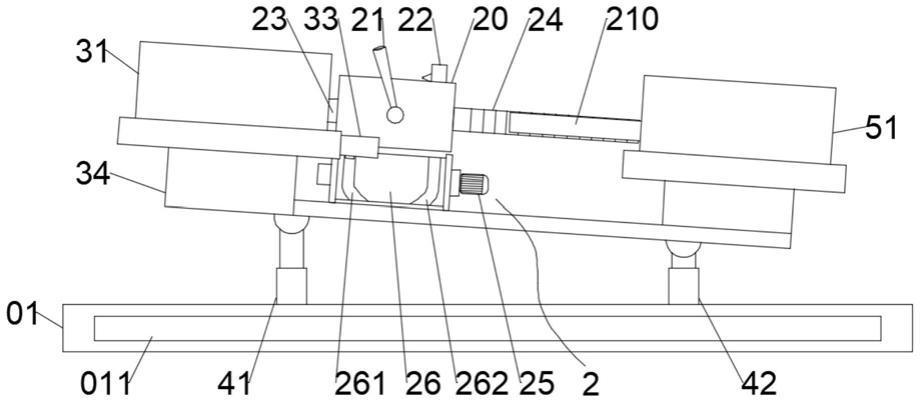
17.图1为骨科牵引装置的结构示意图。
18.图2为骨科牵引装置中部分调节机构的剖视结构示意图。
19.图3为骨科牵引装置中旋转件的立体结构示意图。
20.图4为骨科牵引装置中牵引件的俯视结构示意图。
21.图5为骨科牵引装置中支撑件与部分调节机构连接关系的俯视结构示意图。
22.图6为骨科牵引装置中控制机构的侧视结构示意图。
23.图中:01-底座,011-安装腔,2-调节机构,20-壳体,21-控制件,211-齿轮,22-齿条二,221-啮合头二,23-连接件一,24-齿条三,241-调节件一,25-驱动件,26-旋转件,261-移动槽一,262-移动槽二,27-齿条一,271-啮合头一,28-滑动头,281-调节件二,29-传动轮,210-齿条四,31-固定座一,33-滑座,331-滑槽,34-连接座,36-牵引件,361-放置位一,37-滑动件,38-固定件,41-第一伸缩件,42-第二伸缩件,51-固定座二,52-支撑件,521-放置位二,6-控制机构,61-控制件,62-连接件二,63-固定齿轮,64-抵接头,65-弹性件,66-移动件一,67-移动件二,68-按压件。
具体实施方式
24.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对
本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
25.以下结合具体实施例对本发明的具体实现进行详细描述。
26.如图1-6所示,为本发明一个实施例提供的一种骨科牵引装置,包括牵引件36和支撑件52,所述牵引件36的一侧固定连接有滑座33,还包括:
27.调节机构2,所述调节机构2包括控制件21和旋转件26,旋转件26的输入端设有驱动件25,控制件21的输出端连接有齿轮211,齿轮211的两侧啮合连接有齿条一27和齿条二22,齿条一27和齿条二22均与旋转件26活动啮合,壳体20通过调节件二281与滑动头28转动连接,滑动头28与滑座33滑动连接,壳体20通过调节件一241与齿条三24转动连接,齿条三24的一侧活动啮合有传动轮29,传动轮29的一侧啮合连接有齿条四210;所述调节件二281带动滑动头28移动,调节件一241带动齿条三24移动,控制件21带动齿轮211转动,齿轮211带动齿条一27和齿条二22移动,驱动件25带动旋转件26转动,当滑动头28与滑座33滑动连接且齿条三24未与传动轮29啮合连接时,旋转件26通过与齿条一27啮合连接的方式带动壳体20移动,壳体20通过滑动头28带动滑座33滑动的方式带动牵引件36移动;当齿条三24与传动轮29啮合连接且滑动头28未与滑座33滑动连接时,旋转件26通过与齿条二22啮合连接的方式带动壳体20移动,壳体20带动齿条三24移动,齿条三24通过传动轮29带动齿条四210反向移动,齿条四210通过带动支撑件52移动的方式调节支撑件52与牵引件36之间的间距。
28.在本发明实施例中,优选的,支撑件52采用支撑板,牵引件36采用牵引板,控制件21采用杆,旋转件26采用圆柱体,驱动件25采用电机,调节件二281和调节件一241采用螺杆,所述齿条四210与固定座二51的侧壁固定连接,所述壳体20的一侧固定连接有连接件一23,所述连接件一23通过调节件二281与滑动头28的末端转动连接。连接件一23采用杆或板,连接件一23起到连接壳体20和滑动头28的作用。需要调节牵引件36的位置时,转动调节件二281,调节件二281带动滑动头28朝靠近滑座33的方向移动,直至滑动头28与滑座33滑动连接,转动调节件一241,调节件一241带动齿条三24朝远离传动轮29的方向移动,齿条三24与传动轮29解除啮合关系,逆时针转动控制件21,控制件21带动齿轮211逆时针转动,齿轮211带动齿条一27向下移动,齿条一27与旋转件26啮合,同时齿轮211带动齿条二22向上移动,启动驱动件25,驱动件25带动旋转件26转动,旋转件26带动壳体20移动,壳体20带动滑动头28移动,滑动头28通过与滑座33滑动连接的方式带动牵引件36移动,从而能够根据具体情况调节患者双腿之间的间距;需要调节支撑件52与牵引件36之间的间距时,转动调节件二281,调节件二281带动滑动头28朝远离滑座33的方向移动,滑动头28与滑座33滑动连接的关系解除,转动调节件一241,调节件一241带动齿条三24朝靠近传动轮29的方向移动,齿条三24与传动轮29啮合连接,顺时针转动控制件21,控制件21带动齿轮211顺时针转动,齿轮211带动齿条一27向上移动,同时齿轮211带动齿条二22向下移动,齿条二22与旋转件26啮合,启动驱动件25,驱动件25带动旋转件26转动,旋转件26带动齿条三24移动,齿条三24通过传动轮29带动齿条四210反向移动,齿条四210带动支撑件52移动,进而能够调节支撑件52与牵引件36之间的间距,从而能够根据患者腿的长度对装置进行调节。
29.如图2和图3所示,作为本发明的一种优选实施例,所述旋转件26内开设有移动槽一261和移动槽二262。
30.在本发明实施例中,优选的,移动槽一261呈“》”状,移动槽二262呈“《”状,当齿条
一27与移动槽一261啮合时,齿条一27的末端在移动槽一261的“”状槽内移动时,壳体20向右移动,壳体20通过滑动头28与滑座33滑动连接的方式带动牵引件36向内侧移动(内侧是指朝靠近两腿中心线位置),齿条一27的末端在移动槽一261的“/”状槽内移动时,牵引件36向外侧移动;当齿条二22与移动槽二262啮合时,齿条二22的末端在移动槽二262的“/”状槽内移动时,壳体20带动齿条三24向左移动,齿条三24通过传动轮29带动齿条四210向右移动,齿条四210带动支撑件52朝远离牵引件36的方向移动,齿条二22的末端在移动槽二262的“”状槽内移动时,齿条四210带动支撑件52朝靠近牵引件36的方向移动。
31.如图2所示,作为本发明的一种优选实施例,所述齿条一27上固定连接有啮合头一271,所述齿条二22上固定连接有啮合头二221,所述啮合头一271与移动槽一261活动啮合,所述啮合头二221与移动槽二262活动啮合。
32.在本发明实施例中,优选的,逆时针转动控制件21,控制件21带动齿轮211逆时针转动,齿轮211带动齿条一27和啮合头一271向下移动,此时啮合头一271与移动槽一261啮合连接,启动驱动件25,驱动件25带动旋转件26转动,旋转件26通过移动槽一261与啮合头一271啮合连接的方式带动壳体20移动;顺时针转动控制件21,控制件21带动齿轮211顺时针转动,齿轮211带动齿条一27和啮合头一271向上移动,同时齿轮211带动齿条二22和啮合头二221向下移动,此时啮合头二221与移动槽二262啮合连接,启动驱动件25,驱动件25带动旋转件26转动,旋转件26通过移动槽二262与啮合头二221啮合连接的方式带动齿条三24移动。
33.如图1-5所示,作为本发明的一种优选实施例,所述牵引件36内设有放置位一361,所述牵引件36与固定座一31转动连接,所述支撑件52内设有放置位二521,所述支撑件52与固定座二51转动连接,所述固定座一31和固定座二51通过连接座34连接,所述固定座二51与连接座34滑动连接。
34.在本发明实施例中,优选的,牵引件36采用牵引板,支撑件52采用支撑板,所述固定座一31对称设置,固定座二51对称设置,患者将双腿放置于牵引件36上,支撑件52可对患者的大腿进行支撑。
35.如图4所示,作为本发明的一种优选实施例,所述固定座一31的一侧并列设有滑座33和滑动件37,所述滑座33内开设有滑槽331,所述滑槽331与滑动头28滑动连接,所述滑动件37与固定件38滑动连接。
36.在本发明实施例中,优选的,滑动件37采用滑杆,固定件38采用空心筒。具体的,需要调节牵引件36的位置时,转动调节件二281,调节件二281带动滑动头28朝靠近滑槽331的方向移动,直至滑动头28与滑槽331滑动连接;需要调节支撑件52与牵引件36之间的间距时,转动调节件二281,调节件二281带动滑动头28朝远离滑槽331的方向移动,滑动头28与滑槽331滑动连接的关系解除。牵引件36移动时,滑动件37通过在固定件38内移动的方式达到提高牵引件36移动时稳定性的目的。
37.如图4和图6所示,作为本发明的一种优选实施例,还包括控制机构6,所述控制机构6包括控制件61和按压件68,所述控制件61内滑动连接有移动件二67,所述移动件二67内滑动连接有移动件一66,所述移动件二67与控制件61的内壁之间设有弹性件65,所述按压件68穿过移动件二67和移动件一66并且与控制件61滑动连接,所述移动件一66的末端固定连接有抵接头64。
38.在本发明实施例中,控制件61采用长方体,按压件68采用楔形块,移动件二67和移动件一66采用板,弹性件65采用弹簧,牵引件36和支撑件52上均设有控制机构6,因此控制机构6能够调节牵引件36和支撑件52的角度。
39.如图6所示,作为本发明的一种优选实施例,所述控制机构6还包括固定齿轮63,抵接头64与固定齿轮63活动抵接,所述固定齿轮63与固定座一31固定连接,所述控制件61的侧壁转动连接有连接件二62,所述连接件二62的末端与牵引件36的侧壁转动连接。
40.在本发明实施例中,参考图6,需要调节牵引件36的角度时,抵压按压件68,按压件68向下移动从而带动移动件二67和移动件一66向右移动,此时弹性件65被压缩,进而移动件二67带动抵接头64向右移动,抵接头64与固定齿轮63解除抵接关系,转动控制件61(按压件68保持被按压状态),控制件61通过连接件二62带动牵引件36相对于固定座一31转动,转动至合适角度后,松开按压件68,弹性件65利用自身弹性带动移动件一66和移动件二67向左移动,移动件一66带动抵接头64向左移动,进而抵接头64与固定齿轮63的齿槽抵接,从而能够根据需求对牵引件36的角度进行调节,改善了患者的使用体验。
41.如图1所示,作为本发明的一种优选实施例,所述连接座34与底座01之间设有第一伸缩件41和第二伸缩件42。
42.在本发明实施例中,优选的,第一伸缩件41和第二伸缩件42采用电动伸缩杆,用于调节装置的高度。所述底座01内开设有底座安装腔011,通过螺栓对本装置进行安装。
43.本发明的工作原理是:
44.该骨科牵引装置,需要调节牵引件36的位置时,调节件二281带动滑动头28朝靠近滑槽331的方向移动,直至滑动头28与滑槽331滑动连接,调节件一241带动齿条三24朝远离传动轮29的方向移动,齿条三24与传动轮29解除啮合关系,控制件21带动齿轮211逆时针转动,齿轮211带动齿条一27和啮合头一271向下移动,同时齿轮211带动齿条二22和啮合头二221向上移动,此时啮合头一271与移动槽一261啮合连接,旋转件26通过移动槽一261与啮合头一271啮合连接的方式带动壳体20移动,壳体20通过连接件一23带动滑动头28移动,滑动头28通过与滑槽331滑动连接的方式带动牵引件36移动,从而能够根据具体情况调节患者双腿之间的间距;需要调节支撑件52与牵引件36之间的间距时,调节件二281带动滑动头28朝远离滑槽331的方向移动,滑动头28与滑槽331滑动连接的关系解除,调节件一241带动齿条三24朝靠近传动轮29的方向移动,齿条三24与传动轮29啮合连接,控制件21带动齿轮211顺时针转动,齿轮211带动齿条一27和啮合头一271向上移动,同时齿轮211带动齿条二22和啮合头二221向下移动,此时啮合头二221与移动槽二262啮合连接,旋转件26通过移动槽二262与啮合头二221啮合连接的方式带动齿条三24移动,齿条三24通过传动轮29带动齿条四210反向移动,齿条四210带动支撑件52移动,进而对支撑件52与牵引件36之间的间距进行调节,从而能够根据患者腿的长度对装置进行调节;需要调节牵引件36的角度时,抵压按压件68,按压件68向下移动从而带动移动件二67和移动件一66向右移动,此时弹性件65被压缩,进而移动件二67带动抵接头64向右移动,抵接头64与固定齿轮63解除抵接关系,转动控制件61(按压件68保持被按压状态),控制件61通过连接件二62带动牵引件36相对于固定座一31转动,转动至合适角度后,松开按压件68,弹性件65利用自身弹性带动移动件一66和移动件二67向左移动,移动件一66带动抵接头64向左移动,进而抵接头64与固定齿轮63的齿槽抵接,从而能够根据需求对牵引件36的角度进行调节,改善了患者的使用体验。
45.以上仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些均不会影响本发明实施的效果和专利的实用性。