1.本发明属于医疗器械领域,具体是一种采用了纯机械约束形式的用于辅助外科手术机器人系统的三自由度手术机器人从操作臂。
背景技术:
2.近年来,微创外科手术凭借其出色的医疗效果,得到了广泛支持。然而,普通的腹腔微创外科手术在临床应用中仍然存在许多弊端,如手术中的反杠杆作用导致执刀者手部的运动方向与手术器械末端的运动方向相悖,造成医生眼手动作不协调,加大了操作难度,不仅对于医生的能力技巧有极高的要求,而且劳累、手抖等人为因素也会导致手术精度与手术质量大打折扣。
3.目前,机器人与计算机结合构成的微创手术机器人系统除了保留传统的腹腔镜手术的优点外,还具有稳定性高的优点,可呈现患者体内的立体图像、提高医生感知力、减少医生疲劳度。但是,微创手术机器人需要使手术器械绕远心点运动,为实现这一特殊需求,设计一款能够带动手术器械绕远心点运动的远心机构,对外科手术机器人系统发展与应用有重要意义。
技术实现要素:
4.本发明的目的是克服上述背景技术中的不足,提供一种钢带传动的三自由度手术机器人从操作臂,该从操作臂应能实现微创手术过程中手术器械绕远心点的稳定运动。
5.本发明的技术方案是:
6.一种钢带传动的三自由度手术机器人从操作臂,其特征在于:该从操作臂包括手术器械、驱动手术器械绕远心点进行左右摆动的偏航机构、驱动手术器械绕远心点进行前后摆动的俯仰机构、驱动手术器械进行轴向运动的平动机构;
7.所述偏航机构包括支撑件、可转动地定位在支撑件上的第一支架、安装在支撑件上驱动第一支架转动的第一电机;
8.所述俯仰机构包括可转动地定位第一支架上的第二支架、可转动地定位第二支架上的第三支架、可转动地定位第三支架上的第四支架、驱动第二支架转动的第二电机、使第三支架与第二支架联动的第一钢带、使第四支架与第二支架联动的第二钢带;
9.所述平动机构包括与第四支架固定的连接件、可滑动地定位在连接件上的滑块、固定在连接件上的第三电机、传递第三电机动力驱动滑块运动的锥齿轮组与带轮组;所述手术器械轴的后端与滑块固定。
10.所述第一钢带的两端分别缠绕固定在第一支架固定轴与第三支架固定轴上;所述第二钢带的两端分别缠绕固定在第二支架固定轴与第四支架固定轴上。
11.所述第一支架固定轴与第一支架及第二支架之间的转动轴同轴布置;所述第二支架固定轴、第三支架固定轴与第二支架及第三支架之间的转动轴同轴布置;所述第四支架固定轴与第三支架及第四支架之间的转动轴同轴布置。
12.所述第二支架的两侧各设有两条第一钢带,同一侧的两条第一钢带的两端以相反方向同时缠绕固定在第一支架固定轴与第三支架固定轴上;所述第三支架的两侧各设有一条第二钢带,两条第二钢带的两端以相反方向同时缠绕固定在第二支架固定轴与第四支架固定轴上。
13.所述锥齿轮组包括由第三电机驱动的第一锥齿轮、可转动地定位在连接件上且与第一锥齿轮啮合的第二锥齿轮;所述带轮组包括可转动地定位在连接件上的第一带轮与第二带轮以及安装在第一带轮与第二带轮上的传动带;所述第一带轮与第二锥齿轮同轴固定,滑块与传动带固定。
14.所述连接件上设有戳卡,手术器械轴的前端可滑动地定位在戳卡中。
15.所述第一电机的输出轴垂直于第二电机的输出轴;所述第二电机的输出轴与第一支架及第二支架之间的转动轴同轴布置;所述第二电机的输出轴、第一支架与第二支架之间的转动轴、第二支架与第三支架之间的转动轴、第三支架与第四支架之间的转动轴平行布置;所述第二电机的输出轴垂直于第三电机的输出轴;所述第三电机的输出轴轴线平行于滑块的移动方向。
16.本发明的有益效果是:
17.本发明的各机构均为纯机械约束形式,可驱动手术器械绕远心点进行左右摆动与前后摆动,还能驱动手术器械进行轴向运动,并且利用钢带传动保证微创手术过程中手术器械绕远心点的稳定运动,减少了关节和连杆的数量,使得整机体更加简洁轻便,控制也更加容易,有效降低了多个从机械臂之间的撞机率,极大地提升了手术机器人的性能。
附图说明
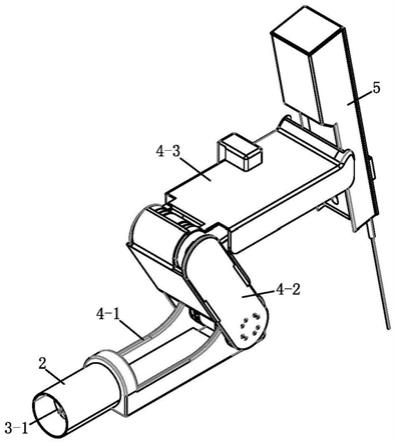
18.图1是本发明的立体结构示意图之一。
19.图2是本发明的立体结构示意图之二。
20.图3是本发明的主视结构示意图。
21.图4是本发明的右视结构示意图。
22.图5是本发明的俯仰机构的立体结构示意图。
23.图6是本发明的平动机构的立体结构示意图。
24.图7是本发明的俯仰机构的爆炸图。
25.图8是本发明的第一支架、第二支架与第三支架的主视结构示意图。
26.图9是本发明的第一支架、第二支架与第三支架的右视结构示意图。
27.图10是图8中a-a向的剖面结构示意图。
28.图11是图9中b-b向的剖面结构示意图。
29.图12是本发明的支撑件与第一支架的连接关系示意图。
30.图13是本发明的第一支架的立体结构示意图。
31.图14是本发明的第二支架的立体结构示意图。
32.图15是本发明的第三支架的立体结构示意图。
33.图16是本发明的第四支架的立体结构示意图。
34.图17是本发明的第二支架连接板的立体结构示意图。
35.图18是本发明的第三支架连接板的立体结构示意图。
36.图19是本发明的第一钢带的连接关系示意图。
37.图20是本发明的第二钢带的连接关系示意图。
38.图21是本发明的平动机构的剖面结构示意图(手术器械未伸出状态)。
39.图22是本发明的齿轮组与带轮组的立体结构示意图。
40.图23是本发明的滑块的立体结构示意图。
具体实施方式
41.以下结合说明书附图,对本发明作进一步说明,但本发明并不局限于以下实施例。
42.如图1所示,一种钢带传动的三自由度手术机器人从操作臂,包括依次连接的偏航机构、俯仰机构、平动机构、手术器械1,偏航机构用于驱动手术器械绕远心点左右摆动(图4中的箭头e方向),俯仰机构用于驱动手术器械绕远心点前后摆动(图3中的箭头c方向),平动机构用于驱动手术器械轴向运动(图3中的箭头d方向)。
43.所述偏航机构包括支撑件2、第一支架4-1、第一电机3-1。所述第一支架通过第一轴承11-1可转动地定位在支撑件上,第一电机固定在支撑件内部并且第一电机的输出轴与第一支架固定,第一支架的转动轴线与第一电机的输出轴轴线同轴布置。所述支撑件为套筒形壳体。
44.所述俯仰机构包括第一支架、第二支架4-2、第三支架4-3、第四支架4-4、第二电机3-2、第一钢带6-1、第二钢带6-2。如图3所示,支撑件设置在第一支架的左端,第二支架的底端可转动地定位第一支架的右端,第三支架的左端可转动地定位第二支架的顶端,第四支架可转动地定位第三支架的右端,第二电机用于驱动第二支架转动,第一钢带在第二支架转动时带动第三支架同步运动,第二钢带在第二支架转动时带动第四支架同步运动。所述第一支架与第二支架之间的转动轴、第二支架与第三支架之间的转动轴、第三支架与第四支架之间的转动轴平行布置。
45.所述第一支架上设有第一支架固定轴,第一支架固定轴与第一支架及第二支架之间的转动轴同轴布置,第二支架上设有第二支架固定轴,第三支架上设有第三支架固定轴,第二支架固定轴、第三支架固定轴与第二支架及第三支架之间的转动轴同轴布置,第四支架上设有第四支架固定轴,第四支架固定轴与第三支架及第四支架之间的转动轴同轴布置。
46.所述第一钢带的两端分别缠绕固定在第一支架固定轴与第三支架固定轴上。所述第二钢带的两端分别缠绕固定在第二支架固定轴与第四支架固定轴上。所述第二电机固定在第一支架的右端,第二电机的输出轴与第二支架固定,第二电机的输出轴与第一支架固定轴同轴布置。所述第一电机的输出轴垂直于第二电机的输出轴。
47.所述第一支架包括两个平行布置的第一支架连接板4-11以及固定在两个第一支架连接板之间的第一支架端板4-12与第一支架电机壳4-13,第一支架电机壳为套筒形壳体并且作为所述第一支架固定轴,第一电机的输出轴与第一支架端板固定,第二电机固定在第一支架电机壳内部,第二电机的输出轴与第一支架电机壳的中轴线同轴布置。
48.所述第二支架包括第二支架中心板4-21、布置在第二支架中心板两侧的两个第二支架连接板4-22、将第二支架中心板与第二支架连接板固定为一体的两个第二支架固定板4-23,每个第二支架固定板上还设有第二支架侧挡板4-24,第二支架中心板的顶端设有第
二支架上挡板4-26。所述第二支架连接板的底端通过第二轴承11-2可转动地定位在第一支架连接板上。所述第二支架连接板的顶端设有第一钢带轴4-25。
49.所述第三支架包括第三支架中心板4-31、固定在第三支架中心板两侧的两个第三支架连接板4-32、第三支架外壳4-35。所述第三支架连接板上设有第二钢带轴4-33,第二钢带轴上同轴固定着第三支架转轴4-34,第三支架转轴通过第三轴承11-3可转动地定位在第二支架中心板的顶端,第一钢带轴、第二钢带轴与第三支架转轴同轴布置,第一钢带轴作为所述第二支架固定轴,第二钢带轴作为所述第三支架固定轴。
50.所述第四支架包括通过第四支架转轴4-41可转动地定位在第三支架中心板上的第四支架连接板4-42,第四支架转轴的两端还设有第三钢带轴4-43。所述第三钢带轴作为所述第四支架固定轴。
51.如图19所示,所述第二支架的两侧各设有两条第一钢带,每一条第一钢带的两端以相反方向同时缠绕固定在第一支架固定轴(第一支架电机壳)与第三支架固定轴(第二钢带轴)上,同一侧的两条第一钢带的同一端以相反方向同时缠绕固定在第一支架固定轴与第三支架固定轴上。
52.所述第三支架的两侧各设有一条第二钢带,每一条第二钢带的两端以相反方向同时缠绕固定在第二支架固定轴(第一钢带轴)与第四支架固定轴(第三钢带轴)上,两条第二钢带的同一端以相反方向同时缠绕固定在第二支架固定轴与第四支架固定轴上。
53.所述第二支架上还设有与第一钢带配合的第一张紧轮12-1,第一张紧轮固定在第二支架固定板上,并且每条第一钢带均配有一个第一张紧轮。所述第三支架上还设有与第二钢带配合的第二张紧轮12-2,第二张紧轮固定在第三支架中心板上,并且每条第二钢带均配有一个第二张紧轮。
54.图3中,第二支架顺时针转动时,第一钢带带动第三支架逆时针转动,第二钢带带动第四支架顺时针转动,从实现手术器械绕远心点的运动;同理,当第二支架逆时针转动时,第三支架顺时针转动,第四支架逆时针转动。
55.所述平动机构包括连接件5、滑块7、第三电机3-3、锥齿轮组、带轮组、戳卡8。所述连接件与第六支架固定,第三电机与戳卡固定在连接件上,滑块可滑动地定位在连接件上,锥齿轮组与带轮组用于依次传递第三电机动力驱动滑块运动,手术器械的后端与滑块固定并且前端可滑动地穿过戳卡。
56.所述连接件包括连接板5-1与保护壳5-2,第三电机与锥齿轮组设置在连接板的一侧,带轮组与滑块设置在连接板的另一侧,第三电机与连接板固定,连接板上还设有引导滑块滑动的两条导轨5-3,保护壳包围住第三电机、锥齿轮组与带轮组,并且保护壳上设有配合滑块运动的避让槽5-4。所述滑块包括设置在保护壳中的下滑块7-1以及设置在保护壳外部的上滑块7-2,下滑块可滑动地定位在导轨上,手术器械与上滑块固定,上滑块还设有穿过避让槽并与下滑块固定的突出部7-3。
57.所述锥齿轮组包括可转动地定位在连接板上的第一锥齿轮9-1与第二锥齿轮9-2,第三电机的输出轴通过联轴器9-3与第一锥齿轮同轴固定,第二锥齿轮与第一锥齿轮啮合。所述带轮组包括可转动地定位在连接板上的第一带轮10-1与第二带轮10-2以及安装在第一带轮与第二带轮上的传动带10-3,第一带轮与第二锥齿轮同轴固定,下滑块通过安装板7-4与传动带固定。所述戳卡通过支架板5-5与连接板固定。
58.本发明的工作原理如下:
59.偏航机构的第一电机启动时,带动俯仰机构、平动机构与手术器械绕远心点进行左右摆动,摆动角度180度左右,俯仰机构的第二电机启动时,通过第一钢带与第二钢带的约束使第一支架、第二支架、第三支架、第四支架构成一个平行四边形机构,带动平动机构与手术器械绕远心点进行前后摆动,摆动角度120度左右,平动机构的第三电机启动时,带动手术器械进行轴向运动,轴向运动的行程可达300mm,手术器械通过戳卡插入患者体内。
60.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。