1.本发明涉及中医诊疗器械领域,具体说是一种用于脉象采集装置的通用型底座,其主要适用于远程诊脉系统。
背景技术:
2.远程诊脉是通过用户端的脉象采集终端设备经智能终端(如智能手机、平板电脑等),经无线通讯到云服务器,服务器通过无线网络到医护端智能终端到医护端的脉象仿真复现,同时在建立一对一的连接中完成音视频的同步传输,形成医生与患者之间接近面对面的诊疗状态,完成望闻问切的模拟环境。远程脉象的仿真复现是将用户端独立采集的寸关尺脉象信号通过一套寸关尺独立的仿生血液循环系统来实现复现,高保真的仿真患者的脉搏跳动。
3.现有的脉象采集装置,如公开号cn 112656386 a的发明专利申请公开的“一种仿生脉诊仪”,该技术方案通过xyz三向调节脉象采集指的位置实现脉象数据的采集,采集指在一次定位后,虽然不同手指能在竖直方向上进行不同高度的微调,以实现“寻脉”的目的。但是,由于结构设计问题,该技术方案的三个采集指仅能在垂直方向上调整,由于末端缺少旋转自由度,无法随医护端医生手指的方位的调整实现万向调节,因此采集的脉象还原度较低。
技术实现要素:
4.本发明的目的是提供一种用于脉象采集装置的通用型底座,从根本上解决了上述问题,其具有结构简单紧凑、使用方便快捷等优点。
5.为实现上述目的,本发明提供了如下技术方案:该用于脉象采集装置的通用型底座包括壳体组件、伸缩底座组件,其技术要点是:伸缩底座组件包括一对滑动支撑在水平面上的底板、一对被线性驱动的可缩进壳体组件内的手腕托板;完全缩进时,底板外侧与壳体组件外壁吻合。
6.进一步的,手腕托板的线性驱动组件包括设置在伸缩驱动电机输出端的齿条、用于定位的伸缩位行程开关和撞块,齿条与手腕托板沿缩进方向固定。
7.进一步的,壳体组件包括相互配合的上壳体和下壳体,下壳体内设有底座滑槽,当手腕托板在其线性驱动组件的驱动下收缩时,其带动底板在滚轮的支撑作用下嵌入底座滑槽中。
8.进一步的,壳体组件内还设有定位采集组件,定位采集组件包括转动限位在壳体组件内的旋转底座、装配在旋转底座上的可万向定位的脉象采集组件。
9.进一步的,脉象采集组件通过三套驱动方向相互垂直的线性驱动组件一次定位,通过转轴与旋转底座的转轴交叉的旋转机构二次定位。
10.进一步的,脉象采集组件包括一套以上的伸缩平面与伸缩底座组件的伸缩平面平行的采集指。
11.本发明的有益效果:整体技术方案上,通过机体上的按键选择测量左手或右手,当选择左手时,左侧的托板自动伸出,传感器采集系统也会选择到左侧,手臂放入托板后,点击智能终端上的开始按钮,系统开始自动寻脉动作,自动寻脉结束后,会向医护端发出提示,医生可以开始诊脉。实现了交互式远程动态取脉过程,取脉和仿真复现同步进行,使医生作为交互闭环控制的重要环节,充分发挥医生的主导性,使医生获取更多的脉象信息。
12.伸缩底座组件,伸缩驱动电机旋转时,通过带动相互啮合的齿轮、齿条做伸缩移动,完成左右手托板伸出和缩回动作。
13.定位采集组件,旋转底座由转台驱动电机驱动,可旋转180
°
,满足左右手互换的选择。x轴、y轴、z轴步进电机构成一套xyz数控移动平台,可控制采集装置实现三轴方向的移动。将xyz三向驱动组件集成在旋转底座上,使结构更加紧凑。
14.脉搏采集装置由三套独立的电机驱动,分别完成寸关尺的脉象采集,电机采样螺杆式微型直流减速电机,电机旋转时螺杆带动螺母移动,驱动传感器前后移动,电机的运动与脉搏传感器检测的取脉压力值及来自医护端医生手指操作的取脉压力值有关,用户端的压力值小于医护端的压力值,电机向前移动。用户端的压力值大于医护端的压力值,电机后退。加以算法控制,实现由医生主导的动态取脉过程。
15.完成自动寻脉过程是指医生在诊脉前,设备将先行进行寻找脉搏点的动作,通过用户端的xyz数控移动机构,并结合脉象采集传感器进行步进式探测。当检测到强烈的脉搏波特征点时,将记忆该位置,目的是帮助医生先找到寸关尺的位置,剩下工作将交给医生来执行,这样做的目的是帮助医生尽快定准位置,避免盲目寻脉,同时满足对不同手臂粗细大小自动适应。
附图说明
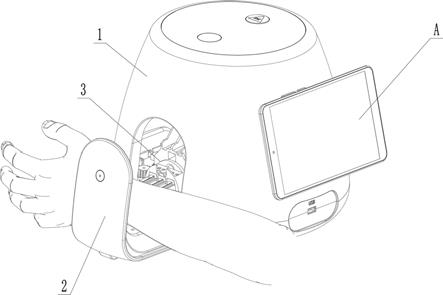
16.图1为本发明的使用状态参考图。
17.图2为本发明脉象采集装置内部结构的等轴侧视结构示意图。
18.图3为本发明壳体组件的分解结构示意图。
19.图4为本发明伸缩底座组件的分解结构示意图。
20.图5为本发明定位采集组件的分解结构示意图i。
21.图6为本发明定位采集组件的分解结构示意图ii。
22.图7为本发明脉象采集组件的等轴侧视结构示意图i。
23.图8为本发明脉象采集组件的等轴侧视结构示意图ii。
24.图9为本发明脉象采集装置的剖视结构示意图。
具体实施方式
25.以下结合图1~9,通过具体实施例详细说明本发明的内容。
26.交互式远程脉诊仪由医护端及用户端两部分组成,其中,用户端用于采集客户脉象信息,医护端实现脉象的仿真复现。同时,通过医生手指的移动操作控制着用户端的取脉压力及位置,寸关尺独立采集,实现浮中沉、举按寻、三部九侯。本发明主要针对用户端的脉象采集部分进行说明,该带有自动寻脉功能的脉象采集装置包括壳体组件1、伸缩底座组件2、定位采集组件3。
27.壳体组件1包括相互配合的上壳体11和下壳体12。上壳体11采用一个连接处与下壳体12配合的拱门形结构,其两端的门形通孔与下壳体12的底座滑槽121方向相对应,下壳体12顶部设置左手选择按键111和右手选择按键112用于输入控制信号,实现伸缩底座组件2的手腕托板24左右手方向的伸出和缩进操作,上壳体11上还设有磁吸安装槽113方便以磁吸的方式限位智能移动终端a。
28.下壳体12一侧设有用于安装转台驱动电机341和主动齿轮342的支架(附图未标记),下壳体12呈十字状布置,具体而言将底座滑槽121贯穿整个下壳体12设置,将总控端123和usb接线端122的连线与底座滑槽121方向垂直布置。其中,总控端123主要包括电源线接口(例如可以是12v供电接口)、总开关、指示灯等,usb接线端122 则用于外部数据的导入,或者实现与智能移动终端之间的数据连接等。当然,也可通过设置wifi模块或蓝牙模块进行无线数据交互,代替传统的usb通讯方式。
29.伸缩底座组件]伸缩底座组件2包括一对滑动支撑在水平面上的底板21、与底板21 配合的手腕托板24、一对对称固定在下壳体12上的伸缩驱动电机23、啮合在伸缩驱动电机23输出端伸缩驱动齿轮231上的设有撞块221的齿条22、与撞块221配合的伸缩位行程开关25。当按下左手选择按键111或右手选择按键112时,主控电路驱动相应侧的伸缩驱动电机23,将齿条22连通手腕托板24从下壳体12伸出,齿条22到达极限位时伸缩驱动电机23停止动作;当进行缩进动作时,撞块221触碰伸缩位行程开关25时,伸缩驱动电机23停止动作。
30.完全缩进时,当手腕托板24在其线性驱动组件的驱动下收缩时,其带动底板21在滚轮211的支撑作用下嵌入底座滑槽121中,端部与定位凸起124配合,此时底板21外侧与壳体组件1外壁吻合,使整体外形呈蛋形保证了外形的美观性。
31.定位采集组件]定位采集组件3包括旋转底座组件34、固定在旋转底座组件34的旋转底座343上的x向组件33、固定在x向组件33的x向滑块上334上的z向组件32、固定在z向组件32的z向滑块324上的y向组件31、固定在y向组件31的y向滑块314上的脉象采集组件35,旋转底座343通过轴承座组件344旋转装配在下壳体12上。支撑背板38固定在z向组件32的支架结构上,其侧部通过电源支架限位固定内置电源36(例如可以是锂电池),以方便装置在无电源线状态下使用,支撑背板38的另一侧安装pcb控制主板37。
32.pcb控制主板37采用arm stm32m103vc为主控芯片,脉搏传感器采集的模拟信号经过24位ad采样芯片ads1256进行数字化处理。tb6612为双路dc马达控制芯片,控制电机完成启停、正反转、调速控制。ft232芯片实现串口通讯,实现与智能终端设备的连接通讯。xyz轴步进电机采用一体化驱动器,其控制端接单片机,由单片机发送运动控制指令。主控板与智能终端连接后,智能终端安装由脉诊仪用户端应用app软件,所以的数据处理、算法、控制指令均由app软件来支持。智能移动终端a可以是智能手机、平板电脑等,充分利用移动智能终端强大的运算能力及网络通讯能力,降低采集终端的制造成本。同时还利用移动智能终端实现音视频同步传输,还可以通过移动终端利用各大运营平台进行客户信息注册、登陆、缴费等,方便各系统运营。
33.各xyz向组件31、32、33包括支架结构,固定在支架一端的线性驱动电机311、321、331,位于线性驱动电机输出端的滑块结构314、324、334,安装在支架结构一侧的行程开关
312、322、332,与相应行程开关实现定位控制的撞块或突触313、323、333。
34.通过上述结构,即可实现脉象采集组件35的沿xyz的快速调整,即一次定位。
35.脉象采集组件35包括固定在y向滑块314上的采集主支架351和采集旋转支架352、限位在采集主支架351内的调角电机353,采集主支架351底部通过设置“爪形”结构,将采集旋转支架352可旋转的限位其中。采集主支架351内限位调角电机353,调角电机353输出端的调角驱动齿轮3531位于采集主支架351与y向滑块314之间,与采集主支架351背部的旋转支架齿轮3521啮合,并在其侧部设置一支持齿轮(图中未标注)。
36.采集旋转支架352的内部并排设置三套分别对应寸关尺穴位的采集指355,采集指355 的末端设置脉象采集传感器(图中未标记)。具体而言,采集旋转支架352内沿长度方向设置滑槽(图中未标记),采集旋转支架352的背部分别设置对应的采集指驱动电机354,通过线性驱动(例如丝杠驱动)的方式将采集指355。从而当采集指驱动电机354获取传动信号时,将各采集指355 伸出或缩进,形成与医护端寸关尺检测手型相对应的号脉形状。医护端角度调整时,亦可通过调角驱动齿轮3531带动三套采集指355同时旋转。
37.附图标记说明:a智能移动终端;1 壳体组件、11 上壳体、111 左手选择按键、112 右手选择按键、113 磁吸安装槽、12 下壳体、121 底座滑槽、122 usb接线端、123 总控端、124 定位凸起;2 伸缩底座组件、21 底板、211 滚轮、22 齿条、221 撞块、23 伸缩驱动电机、231 伸缩驱动齿轮、24 手腕托板、25 伸缩位行程开关;3 定位采集组件、31 y向组件、311 y向步进电机、312 y向行程开关、313 y向突触、314 y向滑块、32 z向组件、321 z向步进电机、322 z向行程开关、323 z向突触、324 z向滑块、33 x向组件、331 x向步进电机、332 x向行程开关、333 x向突触、334 x向滑块、34 旋转底座组件、341 转台驱动电机、342 主动齿轮、343 旋转底座、344 轴承座组件、35 脉象采集组件、351 采集主支架、352 采集旋转支架、3521 旋转支架齿轮、3522 滑轨、353 调角电机、3531 调角驱动齿轮、354 采集指驱动电机、355 采集指、36 内置电源、37 pcb控制主板、38 支撑背板。