自动锚插入系统
1.相关申请的交叉引用
2.本技术要求于2019年7月2日提交且名称为“automated anchor insertion system”的美国临时专利申请号62/869,718的优先权和利益,该申请的全部内容以引用方式并入本文。
背景技术:
1.技术领域
3.本发明涉及一种钻孔导向器和锚驱动器,并且更具体地涉及一种自动锚插入系统。
4.2.相关技术
5.许多整形外科手术过程和医疗过程需要将一个主体固定至另一个主体。此类主体可以包括骨、软组织和假体。一个主体可以使用连接器装置,诸如螺钉和缝线锚(例如,空心的非打结型缝线锚和柔软的全缝线锚)相对于另一个主体固定就位。例如,各种整形外科手术需要在骨内插入和固定缝线锚。
6.缝线锚的一个示例是软缝线锚,诸如装置。参见例如美国9826971。由于软锚常常完全由缝线材料制成,所以它们有时被称为“全缝线”锚,并且通常包括纤维构造锚主体部分(或者纤维、编织或织造织物型结构,诸如柔性网,如美国专利号9173652中所述)和缝线或细丝部分。
7.在整形外科手术中,在插入缝线锚之前,先在骨中钻出引导孔。传统上,将标准的单筒钻孔导向器放置在骨上的期望的引导孔位置(即,期望锚位置)处。然后,将附接至电力器械的钻头穿过钻孔导向器放置以产生引导孔。在此过程期间,需要持续注意导向器,以确保导向器不会从先前选择的位置移动。然后启动电力器械,并且使用钻头产生引导孔。然后移除钻头,替换为预装载有缝线锚的驱动器(或“插入器”)。
8.在维持导向器放置的同时,随后将锚插入导向器中,并且与驱动器一起插入引导孔中。因此,在整个过程中,使用者需要交替使用钻头和驱动器,同时维持导向器的位置。如果导向器的位置丢失,则很难找到引导孔位置。如果找不到该位置,则必须产生新的引导孔。如果使用者未注意到导向器已从原始引导孔位置移动,而将锚插入导向器中,则会损坏锚。在此类情况下,使用者将需要在驱动器上装载新锚。
9.因此,需要一种自动锚插入系统,其通过确保将锚插入到引导孔中来提高使用者效率。
10.相关技术章节免责声明描述:就以上在相关技术章节描述或本公开的其他地方讨论的具体专利/公布/产品而言,这些讨论不应被认为是承认所讨论的专利/公布/产品是出于专利法目的的现有技术。例如,所讨论的专利/公布/产品中的一些或所有可能在时间上不够早,可能没有反映在时间上足够早地发展的主题和/或可能不足以实现等同于专利法目的的现有技术。就以上在相关技术章节描述和/或整个申请中讨论的具体专利/公布/产
品而言,其描述/公开内容均以引用方式以其各自的整体并入本文。
技术实现要素:
11.本发明的实施方案涉及一种自动锚插入系统。根据一个方面,所述系统包括具有第一端和第二端的主体。输入轴从所述主体的所述第一端延伸,并且导向管从所述主体的所述第二端延伸。所述系统还包括所述主体内的第一驱动轴凹部。钻驱动轴能够在输入轴内移动。在第一构型中,所述输入轴和所述钻驱动轴一起通过所述第一驱动轴凹部向远侧移动,在第二构型中,所述钻驱动轴相对于所述输入轴向近侧移动。
12.根据另一个方面,所述系统包括具有第一端和第二端的主体。输入轴从所述主体的所述第一端延伸,并且导向管从所述主体的所述第二端延伸。所述系统还包括所述主体内的第一驱动轴凹部和第二驱动轴凹部。钻驱动轴能够在所述输入轴内移动,并且插入器驱动轴能够在第二驱动轴凹部内移动。在第一构型中,所述输入轴和所述钻驱动轴一起通过所述第一驱动轴凹部向远侧移动,在第二构型中,所述钻驱动轴相对于所述输入轴向近侧移动。在第三构型中,所述钻驱动轴的移动使所述插入器驱动轴移动。
13.根据又一个方面,本发明是一种用于产生引导孔和插入锚的方法。所述方法包括以下步骤:(i)提供具有第一端和第二端的主体、从所述主体的所述第一端延伸的输入轴和从所述主体的所述第二端延伸的导向管、所述主体内的第一驱动轴凹部和第二驱动轴凹部、能够在所述输入轴内移动并且连接到钻头的钻驱动轴,以及能够在所述第二驱动轴凹部内移动并且连接到锚驱动器的插入器驱动轴;(ii)驱动所述输入轴,其使所述输入轴和所述钻驱动轴一起在远侧方向上驱动并且使所述钻头延伸穿过所述导向管,从而钻出所述引导孔;(iii)将所述输入轴连接到所述第一驱动轴凹部;以及(iv)通过驱动所述输入轴并且在近侧方向上独立地移动所述钻驱动轴来缩回所述钻头。
14.参考下文描述的实施方案,本发明的这些和其他方面将变得显而易见并得到阐明。
附图说明
15.通过结合附图阅读以下详细描述,将更全面地理解和领会本发明。附图仅展示了所公开主题的典型实施方案,因此不被认为是对其范围的限制,因为所公开主题可以允许其他等效的实施方案。现在简要参考附图,其中:
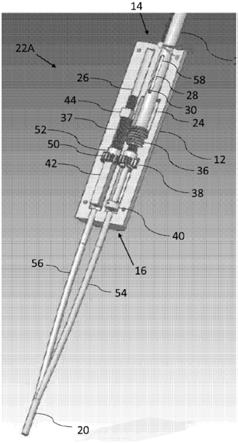
16.图1是根据实施方案的自动锚插入系统的透视示意图;
17.图2是根据实施方案的自动锚插入系统的分解示意图;
18.图3是根据实施方案的自动锚插入系统的局部截面图示意图;
19.图4是根据实施方案的处于开始构型的锚系统的局部剖视前视图示意图;
20.图5是根据实施方案的处于第一钻孔构型的锚系统的局部剖视前视图示意图;
21.图6是根据实施方案的处于第二钻孔构型的锚系统的局部剖视前视图示意图;
22.图7是根据实施方案的处于第一缩回构型的锚系统的局部剖视前视图示意图;
23.图8是根据实施方案的处于第二缩回构型的锚系统的局部剖视前视图示意图;
24.图9是根据实施方案的处于第一插入构型的锚系统的局部剖视前视图示意图;并且
25.图10是根据实施方案的处于第二插入构型的锚系统的局部剖视前视图示意图。
具体实施方式
26.下面参考附图中所示的非限制性示例更全面地解释本发明的各方面及其某些特征、优点和细节。省略了对公知结构的描述,以免不必要地使本发明在细节上变得模糊。然而,应当理解,详细描述和具体的非限制性示例虽然指示了本发明的方面,但仅以说明的方式给出,而不是以限制的方式给出。根据本公开,在本发明的基本概念的精神和/或范围内的各种替换、修改、添加和/或布置对于本领域技术人员而言将是显而易见的。
27.现在参考附图,其中类似的附图标记始终指代类似的部分,图1示出了根据实施方案的自动锚插入系统10(也称为“锚系统”或“钻孔系统”)的透视示意图。锚系统10包括具有第一端14和第二端16的主体12。如图1所示,输入轴18从第一端14向近侧延伸,并且导向管20从第二端16向远侧延伸。
28.现在参考图2,示出了根据实施方案的自动锚插入系统10的分解示意图。在图2所示的实施方案中,锚系统10的主体12包括两个件,第一外部主体部分22a和第二外部主体部分22b。可以设想,在替代实施方案中,主体12可以机械加工为单个部件。在图2中,第一外部主体部分22a和第二外部主体部分22b各自包括第一驱动轴凹部24和第二驱动轴凹部26。当连接或以其他方式接合第一外部主体部分22a和第二外部主体部分22b时,第一驱动轴凹部24形成第一驱动轴通道,并且第二驱动轴凹部26形成第二驱动轴通道。
29.如图2所示,第一驱动轴凹部24(和第一驱动轴通道)延伸穿过主体12(包括第一外部主体部分22a和第二外部部分22b)的第一端14。在所描绘的实施方案中,第一驱动轴凹部24包括螺纹部分,即,机械加工到第一驱动轴凹部24中的螺纹25。第一驱动轴凹部24的尺寸和构型被设计成接纳输入轴18和钻驱动轴28。如图2所示,输入轴18相对于钻驱动轴28定位在近侧。钻驱动轴28包括螺纹部分,其中在其近端29与远端31之间具有螺纹27。
30.锚系统10的功能的中心是钻销30,其固定到钻驱动轴28并且从该钻驱动轴延伸。输入轴18的远端32附接到钻缩回齿轮36(也称为“套环”)。钻缩回齿轮36具有外部螺纹33,该外部螺纹的大小和构型被设计成接合且联接到第一驱动轴凹部24的螺纹25。钻缩回齿轮36还具有内螺纹(未示出),该外部螺纹被构造成接合且联接到钻驱动轴28的螺纹27。钻驱动轴28延伸穿过一个或多个齿轮34,包括钻缩回齿轮36。钻驱动轴28的远端31延伸穿过钻缩回齿轮36和正齿轮38,并且附接到齿形齿轮(dog gear)40。因此,齿形齿轮40与钻驱动轴28一起移动。
31.仍参考图2,第二驱动轴凹部26的大小和构型被设计成接纳插入器驱动轴42。插入器驱动轴42具有远侧方形部分35(即,具有方形截面的部分)和近侧螺纹部分(具有螺纹37)。方形螺母(或縠)44固定在第二驱动轴凹部26内,并且插入器驱动轴42的近端46旋转通过方形螺母44,从而允许方形螺母44接合并且抓住近侧螺纹部分的螺纹37。插入器驱动轴42的远端48可以延伸或以其他方式移动通过正齿轮50。特别地,如图2所示,正齿轮50具有方形驱动器52,以容纳插入器驱动轴42的远侧方形部分35。方形螺母44、插入器驱动轴42和正齿轮50位于第二驱动轴凹部26(和第二驱动轴通道)内。
32.如上文所述且如图2所示,锚系统10具有从主体12的第二端16延伸的导向管20。特别地,导向管20是分叉的,使得导向管20分成第一导向管54和第二导向管56。在所描绘的实
施方案中,第一导向管54延伸到第一驱动轴凹部24中,并且第二导向管56延伸到第二驱动轴凹部26中。特别地,第一导向管54固定到第一驱动轴凹部24,并且第二导向管56固定到第二驱动轴凹部26。
33.现在参考图3,示出了根据实施方案的自动锚插入系统10的局部截面图示意图。在局部截面图中,示出了第一外部主体部分22a;然而,第二外部主体部分22b看起来像是图3的镜像。在所描绘的实施方案中,输入轴18位于第一驱动轴凹部24内。如图3所示,输入轴18是空心的,使得输入轴18在钻驱动轴28上延伸。换句话说,钻驱动轴28的大小和构型被设计成装配在输入轴18内。如图3所示,输入轴18在钻驱动轴28上延伸到钻缩回齿轮36,而钻驱动轴28延伸穿过钻缩回齿轮36和正齿轮38并且连接到齿形齿轮40。
34.仍参考图3,插入器驱动轴42位于第二驱动轴凹部26内。方形螺母44示出为接合插入器驱动轴42的螺纹37。插入器驱动轴42延伸穿过正齿轮50的方形驱动器52。如下文详细描述,插入器驱动轴42的正齿轮50与钻驱动轴28的正齿轮38相邻并且有时可以与之接合。如图3所示,附接到钻驱动轴28的钻销30示出为延伸穿过输入轴18的销导向器58,用于在外科手术期间提供指示,如下文详细描述。销导向器58具有附加功能,诸如在输入轴18与钻驱动轴28之间传递扭矩。
35.现在参考图4至图10,示出了根据实施方案的在不同使用阶段中的自动锚插入系统10的局部剖视前视图示意图。在所描绘的实施方案中,钻头100示出为附接到钻驱动轴28并且从该钻驱动轴延伸。钻头100从钻驱动轴28延伸并且穿过第一导向管54。还如图4至图10所示,锚驱动器(或插入器)200示出为附接到插入器驱动轴42并且从该插入器驱动轴延伸。锚驱动器200从插入器驱动轴42延伸并且穿过第二导向管56。在所描绘的实施方案中,示出了第二外部主体部分22b;然而,第一外部主体部分22a看起来像示出的那些的镜像。
36.图4示出了根据实施方案的处于开始构型的锚系统10。在开始构型中,锚系统10放置在手术部位处的期望位置处,并且使用者完全控制钻孔系统10的平移和旋转。如图所示,输入轴18和钻驱动轴28处于延伸状态,该延伸状态由螺纹套环36(经由与钻驱动轴28的螺纹27接合和联接)保持,使得钻销30位于销导向器58的远侧(或位于远端39处)。在开始构型中,齿形齿轮40与正齿轮38间隔开或以其他方式不与该正齿轮接合。
37.图5示出了根据实施方案的处于第一钻孔构型的锚系统10。从开始构型,输入轴18开始驱动钻驱动轴28,使钻头100通过第一导向管54推进。使用者向下推动输入轴18,从而驱动钻驱动轴28。使用者可以通过连接到输入轴18的手持件或其他电源装置(未示出)在远侧方向上向输入轴18施加压力。当输入轴18驱动钻驱动轴28时,它们都向远侧移动,同时在第一驱动轴凹部24内旋转。钻缩回齿轮36与输入轴18和钻驱动轴28两者一起旋转。如图5所示,钻销30保持在销导向器58的远侧(或在远端39处)。在第一钻孔构型中,由于钻驱动轴28的远侧平移,齿形齿轮40从正齿轮38向远侧移动得更远。在实施方案中,在第一钻孔构型(图5)中,钻头100大致处于钻入介质的动作的一半(即,引导孔的产生的一半)。
38.从第一钻孔构型,使用者继续推动(即,在远侧方向上施加力)输入轴18,该输入轴继续驱动钻驱动轴28并且使钻头100通过第一导向管54推进到用于产生引导孔的期望深度。如图6所示,输入轴18和钻驱动轴28推进,直到它们在第二钻孔构型处触底。在第二钻孔构型处,螺纹钻缩回齿轮36旋转到第一驱动轴凹部24的内螺纹25中。一旦钻缩回齿轮36的螺纹33接合第一驱动轴凹部24的内螺纹25,则钻缩回齿轮36相对于主体12固定。如图所示,
在第二钻孔构型中,齿形齿轮40比在第一钻孔构型中离正齿轮38更远,并且钻销30保持在销导向器58中的远侧(或在远端39处)。一旦达到用于产生引导孔的期望深度(在第二钻孔构型中),由于将钻缩回齿轮36固定到主体12,使用者不再能够控制平移。
39.然后,从第二钻孔构型,使用者必须继续施加旋转输入(到输入轴18)以完成插入过程。锚系统10将经由用于向远侧驱动钻头100的相同旋转输入开始缩回该钻头,这简化了锚系统10并且消除了使用者必须正确执行任务序列的依赖性。具体地说,钻驱动轴28的螺纹27相对于现在固定的钻缩回齿轮36的内螺纹(未示出)旋转,该内螺纹将钻驱动轴28向近侧拉入输入轴18中,从而将钻头100从引导孔中拉出。在图7中,根据实施方案,锚系统10处于第一缩回构型中。在第一缩回构型中,钻驱动轴28已向近侧移动,而输入轴18保持在适当位置,并且螺纹钻缩回齿轮36保持在第一驱动轴凹部24的内螺纹25中。钻驱动轴28的近侧缩回经由钻销30在输入轴18的销导向器58中的位置示出。与其在开始构型以及第一钻孔构型和第二钻孔构型中的定位相比,钻销30已在销导向器58内向近侧移动。在第一缩回构型中,与其在第二钻孔构型中的位置相比,齿形齿轮40已向近侧移动,更靠近正齿轮38。
40.图8示出了根据实施方案的处于第二缩回构型中的锚系统10。从第一缩回构型,钻驱动轴28在近侧方向上移动更远,直到其在第二缩回构型中完全回缩。钻驱动轴28的完全近侧缩回经由钻销30在输入轴18的销导向器58中的位置示出。与其在第一缩回构型中的定位相比,钻销30已在销导向器58内近侧移动(移动到其近端41)。在第二缩回构型中,齿形齿轮40已向近侧移动,从而接合正齿轮38。如图8所示,齿形齿轮40的特征部43(例如,凸缘)接合正齿轮38的特征部45(例如,凸缘)。由于齿形齿轮40与正齿轮38的联接,正齿轮38开始随着钻驱动轴28的旋转(经由输入轴18)而旋转。钻驱动轴28的正齿轮38的旋转被平移到插入器驱动轴42上的正齿轮50,从而使插入器驱动轴42通过方形螺母(或毂)44并且在第二驱动轴凹部26内旋转。
41.还如图8所示,正齿轮50包括方形驱动器52,并且插入器驱动轴42包括远侧方形部分35,从而允许旋转从正齿轮50转移到插入器驱动轴42。因此,在第二(或完全)缩回构型处,插入器驱动轴42开始在第二驱动轴凹部26中向远侧平移。由于插入器驱动轴42的近端46处的螺纹37,因此平移是允许的。换句话说,方形螺母44保持在适当位置,而插入器驱动轴42经由螺纹37在方形螺母44内和穿过该方形螺母的旋转而向远侧平移。当插入器驱动轴42旋转时,螺纹37将锚驱动器(或插入器)200推出通过第二导向管56。在整个该过程中,使用者正在维持来自输入轴18上的手持件或其他电源装置(例如,钻)的旋转输入。
42.图9示出了根据实施方案的处于第一插入构型的锚系统10。从第二缩回构型,使用者继续将旋转输入到输入轴18,并且插入器驱动轴42继续通过方形螺母44在第二驱动轴凹部26中向远侧平移。在图9所示的第一插入构型中,插入器驱动轴42以其上的螺纹37的相同螺距旋转。
43.图10示出了根据实施方案的处于第二插入构型的锚系统10。在第二插入构型中,锚驱动器(或插入器)200上的锚(未示出)已到达引导孔(未示出)中的期望插入深度。如图所示,一旦达到期望插入深度,插入器驱动轴42就与正齿轮50的方形驱动器52脱离。由于插入器驱动轴42的近端46上的螺纹37与方形螺母44接合,因此插入器驱动轴42保持在期望插入深度处。
44.在第二插入构型中,无论对输入轴18施加多少旋转,都不会提供附加平移。这消除
了即使已达到期望深度或预定深度,仍将锚连续地驱动或旋转到引导孔中的风险。从这一点起,插入器驱动轴42上或第二驱动轴凹部26内的指示器(未示出)将通知使用者插入完成。指示器在锚系统10上的位置可以基于部署的锚的类型而变化。使用者将从定位部位移除整个锚系统10,其中锚插入到引导孔中。
45.自动锚插入系统10最终提高使用者效率。其确保将锚插入产生的引导孔中。它使使用者能够只关注锚的位置而不是处理多个装置。它还消除了将锚连续地驱动到引导孔中超过期望深度的风险。最重要的是,锚系统10是可以与软锚和刚性锚一起使用的平台。
46.尽管已经参考某些示例性实施方案具体示出并描述了本发明的实施方案,但是本领域技术人员将理解,在不脱离可以由书面描述和附图支持的权利要求所限定的本发明的精神和范围的情况下,可以在其中进行各种细节的改变。此外,在参考一定数量的元件描述示例性实施方案的情况下,将理解,可以利用少于或大于一定数量的元件来实践示例性实施方案。