1.本实用新型涉及健身器材技术领域,尤其涉及一种臂力训练器材。
背景技术:
2.随着人们生活和工作节奏日益紧张,身体健康变的尤为重要,因此人们越来越重视健身,很多人都利用业余时间去各健身场所利用各种健身器材锻炼身体。臂力训练器材是人们经常用到的健身器材之一,现在,市场上已经有了各种各样的臂力训练器材,每种器材都在一定范围内具有某种优势,解决了一定的问题。
3.现在,市场上常见的臂力训练器材通常采用训练者拉动绳索的一端,绳索的另一端通过施加不同重量、不同数量的配重对训练者施加重量的方式。但是,这种训练器材结构复杂,占用了大量的空间,训练时需要人工操作增减配重,操作麻烦,容易引起人身伤害。
技术实现要素:
4.有鉴于此,本实用新型旨在提供一种臂力训练器材,采用通过电磁机构对训练用的绳索施加反作用力,替代普通的训练器材的配重,解决了结构复杂,占用了大量的空间,训练时需要人工操作增减配重,操作麻烦,容易引起人身伤害的问题。
5.为达到上述目的,本实用新型的技术方案是这样实现的:
6.一种臂力训练器材,包括:
7.施力装置,包括:
8.电磁机构;
9.第一过线轮,与所述电磁机构轴连接,在所述第一过线轮的圆周面上设有第一过线槽;
10.绳索,一端固定于所述第一过线轮,并且,所述绳索沿所述第一过线轮的转动方向反方向缠绕在所述第一过线槽上,另一端为手握端。
11.进一步的,所述的臂力训练器材还包括:
12.支架,所述施力装置固定于所述支架上;
13.力量臂装置,包括:
14.连接机构,与所述支架在第一方向可转动地连接;
15.力量臂,具有连接端和悬臂端,呈管状结构,所述连接端与所述连接机构在第二方向上可转动地连接,所述绳索从第一过线轮穿过管状的所述力量臂从所述悬臂端穿出,在不受力的情况下,所述手握端卡止在所述悬臂端的外部。
16.进一步的,所述力量臂装置还包括:
17.导向器,与所述悬臂端的内管插接连接;
18.在所述导向器的内部设有通孔,所述通孔与所述内管同轴:
19.在所述导向器的内部还设有第一滑轮组,所述第一滑轮组通过两个第一滑轮相切连接构成,其切点位于所述通孔的轴线上;
20.在所述第一滑轮的圆周面上设有第二过线槽;
21.所述绳索从所述悬臂端通过所述通孔和所述第二过线槽的切点处穿出。
22.进一步的,所述连接机构包括:
23.固定架,与所述支架在第一方向上可转动地连接;
24.蜗杆,在第一方向上可转动地固定于所述固定架;
25.涡轮组件,在第二方向上可转动地固定于所述固定架,并且,所述涡轮组件与所述蜗杆啮合连接;
26.所述力量臂的所述连接端与所述涡轮组件固定连接。
27.进一步的,所述涡轮组件包括:
28.第一轮盘;
29.第二轮盘,与所述第一轮盘相对设置;
30.第二过线轮,通过所述第一轮盘和所述第二轮盘夹持,并且所述第一轮盘、第二过线轮和所述第二轮盘同轴与所述固定架连接,在第二过线轮的圆周面上设有第三过线槽。
31.进一步的,所述涡轮组件还包括:
32.第二滑轮组,通过两个第二滑轮相切连接构成,两个所述第二滑轮的切点位于所述涡轮的中心与所述力量臂的轴心的连线上;
33.在两个所述第二滑轮的圆周上设有第四过线槽,所述绳索从所述第一过线轮通过所述第四过线槽的所述切点穿入所述力量臂内。
34.进一步的,所述固定架与所述支架之间通过转动轴连接,在所述转动轴上设有阻尼机构。
35.进一步的,所述阻尼机构为套设在所述转动轴外周面的套筒,所述套筒与所述转动轴之间过盈配合;
36.在所述套筒的筒壁上沿所述套筒的轴向方向设有缝隙。
37.进一步的,所述的臂力训练器材还包括:
38.控制装置,固定于所述支架上,所述控制装置包括:
39.处理器,接收外部信息,并对外部信息进行处理,产生反馈信息后驱动指令;
40.驱动器,接收所述处理器发送的所述驱动指令,驱动所述施力装置动作;
41.输入输出设备,向所述处理器输入初始参数,实时输出所述施力装置施加作用力的状态变化信息、所述力量臂装置在所述第一方向和所述第二方向的角度信息。
42.进一步的,所述输入输出设备为触摸屏;
43.所述控制装置还包括外壳体,所述处理器和所述控制器设置于所述外壳体内部;
44.所述外壳体的一侧设有开口,所述触摸屏扣合于所述开口。
45.相对于现有技术,本实用新型所述的一种臂力训练器材,具有以下优势:
46.本技术方案优点在于通过电磁机构对训练用的绳索施加反作用力,替代普通的训练器材的配重,结构简单,节省了大量的空间,训练时无需人工操作增减配重,操作方便,避免引起人身伤害。
附图说明
47.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新
型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
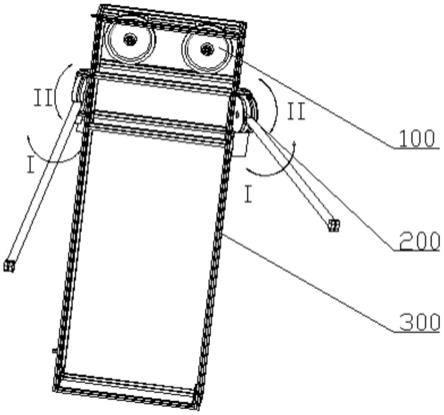
48.图1为本实用新型实施例所述的臂力训练器材的立体图;
49.图2为本实用新型实施例所述的施力装置的立体图;
50.图3为本实用新型实施例所述的力量臂装置的立体图;
51.图4为本实用新型实施例所述的连接机构的立体图;
52.图5为本实用新型实施例所述的力量臂的立体图;
53.图6为本实用新型实施例所述的导向器的立体图;
54.图7为本实用新型实施例所述的涡轮的分解图。
55.附图标记说明:
56.100-施力装置,110-电磁机构,120-第一过线轮,121-第一过线槽,200-力量臂装置,210-连接机构,211-涡轮组件,2111-第一轮盘,2112-第二轮盘,2113-第二过线轮,2114-第二滑轮组,212-蜗杆,213-固定架,214-转动轴,220-力量臂,221-连接端,222-悬臂端,230-导向器,231-通孔,232-第一滑轮组,300-支架。
具体实施方式
57.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
58.在本实用新型中涉及“第一”、“第二”、“上”、“下”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“上”、“下”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当实施例之间的技术方案能够实现结合的,均在本实用新型要求的保护范围之内。
59.下面将参考附图并结合实施例来详细说明本实用新型。
60.如图1所示,一种臂力训练器材,如图1所示,包括:施力装置100和绳索(图中未示)。如图2所示,施力装置100包括:电磁机构110和第一过线轮120。第一过线轮120与所述电磁机构110轴连接,在所述第一过线轮120的圆周面上设有第一过线槽121。
61.绳索的一端固定于所述第一过线轮120,并且,所述绳索沿所述第一过线轮120的转动方向反方向缠绕在所述第一过线槽121上,另一端为手握端。
62.电磁机构替代配重,给绳索施加反作用力。具体的,电磁机构包括电机和减速器,电机与减速器轴连接,减速器的输出端连接第一过线轮,通过电机产生动力,带动第一过线轮转动,将绳索沿第一过线轮的转动方向的反方向缠绕,当训练者拉动绳索时,拉动方向与第一过线轮的转动方向相反,电机所产生的动力就形成了对绳索施加的反作用力。所施加的反作用力可通过电磁机构110设置。当训练者减小拉绳索的力量,甚至完全放松绳索时,通过第一过线轮的转动,带动绳索回缩。训练者在训练的过程中,反复进行拉动—放松—拉动—放松的动作,绳索随之绕第一过线轮进行反复的正反转的转动,形成反复的拉伸—回缩—拉伸—回缩的动作。通过电磁机构110对训练用的绳索施加反作用力,替代普通的训练器材的配重,结构简单,节省了大量的空间,训练时无需人工操作增减配重,操作方便,避免引起人身伤害。
63.具体的,如图1所示,所述的臂力训练器材还包括:支架300和力量臂装置200。所述施力装置100固定于所述支架300上。如图3所示,力量臂装置200包括连接机构210,与所述支架300在第一方向i可转动地连接。力量臂220具有连接端221和悬臂端222,呈管状结构,所述连接端221与所述连接机构210在第二方向ii上可转动地连接,所述绳索从第一过线轮120穿过管状的所述力量臂220从所述悬臂端222穿出,在不受力的情况下,所述手握端卡止在所述悬臂端222的外部。
64.进行臂力训练时,不同的角度和位置可以对手臂或躯干不同的肌肉得到不同的训练,力量臂装置200可以使得训练者在训练时定位于固定的角度和位置进行训练。通过连接机构210在第一方向i的转动,和力量臂220在第二方向ii的转动调节训练时的角度,绳索穿过力量臂220后可以定位于力量臂装置200定位的角度,实现不同角度的训练。
65.进一步的,如图3所示,所述力量臂装置200还包括导向器230,与所述悬臂端222的内管插接连接。如图6所示,在所述导向器230的内部设有通孔231,所述通孔231与所述内管同轴。在所述导向器230的内部还设有第一滑轮组232,所述第一滑轮组232通过两个第一滑轮相切连接构成,其切点位于所述通孔231的轴线上。在所述第一滑轮的圆周面上设有第二过线槽。所述绳索从所述悬臂端222通过所述通孔231和所述第二过线槽的切点处穿出。
66.导向器230的第一滑轮组232的切点位于通孔231的轴线上,绳索穿过通孔231通过第一滑轮组232的切点处的第二过线槽穿出力量臂装置200,使得绳索始终沿一个角度延伸,导向器230起到了对绳索的导向作用。
67.进一步的,如图4所示,所述连接机构210包括固定架213、蜗杆212和涡轮组件211。固定架231与所述支架300在第一方向i上可转动地连接。蜗杆212在第一方向i上可转动地固定于所述固定架213。涡轮组件211在第二方向ii上可转动地固定于所述固定架213,并且,所述涡轮组件211与所述蜗杆212啮合连接。所述力量臂220的所述连接端221与所述涡轮组件211固定连接。
68.通过连接机构210在第一方向i的转动实现力量臂220在第一方向i的转动。通过涡轮蜗杆机构的转动,实现力量臂220在第二方向ii的转动。
69.进一步的,如图7所示,所述涡轮组件211包括第一轮盘2111、第二轮盘2112和第二过线轮2113。第二轮盘2112与所述第一轮盘2111相对设置。第二过线轮2113通过所述第一轮盘2111和所述第二轮盘2112夹持,并且所述第一轮盘2111、第二过线轮2113和所述第二轮盘2112同轴与所述固定架213连接,在第二过线轮2113的圆周面上设有第三过线槽。
70.将涡轮组件211制成由第一轮盘2111和第二轮盘2112组合的形式,可以将第二过线轮2113夹持于第一轮盘2111和第二轮盘2112之间,绳索可以在第二过线轮2113缠绕数圈(2-3圈即可)在穿入力量臂220的内管中。
71.进一步的,所述涡轮组件211还包括第二滑轮组2114,通过两个第二滑轮相切连接构成,两个所述第二滑轮的切点位于所述涡轮组件211的中心与所述力量臂220的轴心的连线上。在两个所述第二滑轮的圆周上设有第四过线槽,所述绳索从所述第一过线轮120通过所述第四过线槽的所述切点穿入所述力量臂220内。
72.第二滑轮组2114的切点位于涡轮组件211的中心与所述力量臂220的轴心的连线上,与第一滑轮组232同样起到了对绳索的导向作用。
73.经过上述结构的力量臂装置,绳索从第一过线轮120伸出后到从导向器的第一滑
轮组232穿出,经过第一轮盘2111和第二轮盘2112之间的第二过线轮2113,通过第二滑轮组2114的导向穿入力量臂220内,再通过导向器230的通孔231,经过第一滑轮组232的第二次导向后从力量臂220穿出,使得绳索始终隐藏于力量臂装置200中,使得外观整洁,避免了绳索在使用过程中对其它零部件的干涉。
74.进一步的,所述固定架213与所述支架300之间通过转动轴214连接,在所述转动轴214上设有阻尼机构(图中未示)。
75.设置阻尼机构可以实现力量臂220在第一方向i上的定位。
76.进一步的,所述阻尼机构为套设在所述转动轴214外周面的套筒,所述套筒与所述转动轴214之间过盈配合。在所述套筒的筒壁上沿所述套筒的轴向方向设有缝隙。
77.通过连接机构210使得力量臂220可以在第一方向i和第二方向ii转动,力量臂220与连接机构210的连接,选择涡轮蜗杆机构,力量臂220与涡轮211固定连接,因为涡轮蜗杆具有自锁功能,因此力量臂220在第二方向ii的定位功能通过涡轮蜗杆的自锁功能实现。力量臂220在第一方向i的定位采用在转动轴214的外部过盈配合套设套管实现。
78.进一步的,所述的臂力训练器材还包括:控制装置(图中未示),固定于所述支架300上,所述控制装置包括处理器、驱动器和输入输出设备。处理器接收外部信息,并对外部信息进行处理,产生反馈信息后驱动指令。驱动器接收所述处理器发送的所述驱动指令,驱动所述施力装置动作。输入输出设备,向所述处理器输入初始参数,实时输出所述施力装置施加作用力的状态变化信息、所述力量臂装置200在所述第一方向i和所述第二方向ii的角度信息。
79.通过控制装置可以实现对施力装置100施加作用力的大小的控制。用户可以自定义作用力的大小,通过处理器处理后,如果判断处于器材允许范围内,则通过驱动器驱动电磁机构施加作用力,如果超出器材允许范围,则反馈设置失败信息并进行报警。用户设定信息、施力装置100和力量臂装置200的状态信息的输出均通过输入输出设备完成。该过程替代了普通臂力训练器材施加配重砝码的过程,操作方便,避免人身事故的发生。
80.进一步的,所述输入输出设备为触摸屏。所述控制装置还包括外壳体,所述处理器和所述控制器设置于所述外壳体内部。所述外壳体的一侧设有开口,所述触摸屏扣合于所述开口。
81.输入输出设备采用触摸屏,整体集成于一个外壳体中,形成一个一体机,外观整洁,方便安装和日常操作。
82.本领域技术人员在考虑说明书及实践这里公开的实用新型后,将容易想到本实用新型的其它实施方案。本技术旨在涵盖本实用新型的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本实用新型的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本实用新型的真正范围和精神由下面的权利要求指出。
83.应当理解的是,本实用新型并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本实用新型的范围仅由所附的权利要求来限制。