1.本发明属于智能机器人技术领域,具体涉及了一种机器视觉的网球自动捡球机器人。
背景技术:
2.随着网球等球类运动的不断普及,越来越多的运动爱好者开始投身于网球的锻炼中来,而在训练时,网球的使用量非常大,频繁捡起散落在很大范围内的网球是一件耗时耗力的工作,而且不是每个人都能像专业球类运动员一样拥有属于自己的球童,因此高效的自动捡球机会为训练者们提供便利,节省时间。
3.传统的网球拾取机器人依赖红外避障和超声波测距,存在漏检球的问题,同时传统的网球拾取机器人是手推半自动式,需要人工操作,效率较低。
4.基于此,本技术提供了一种基于机器视觉的网球自动捡球机器人,不仅能够代替人工操作,且工作效率高,体积小,无盲点,提高了网球场地上自动捡球的效率。
技术实现要素:
5.针对现有技术中所存在的不足,本发明提供了一种机器视觉的网球自动捡球机器人,以解决目前的捡球机器人存在漏检球的问题,同时传统的网球拾取机器人是手推半自动式,需要人工操作,效率较低的问题。
6.为实现上述目的,本发明采用了如下的技术方案:
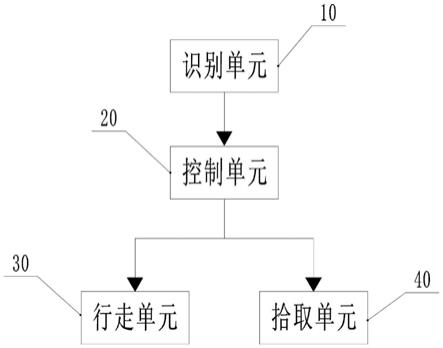
7.一种机器视觉的网球自动捡球机器人,包括识别单元、行走单元、拾取单元和控制单元;所述识别单元包括视觉传感器,所述视觉传感器能够将球场上待拾取的网球坐标信号传输给控制单元;所述拾取单元设置在行走单元上,控制单元通过接受到的坐标信号,规划出行走路径,并控制行走单元按照行走路径向坐标点移动,后控制拾取单元对网球进行拾取。
8.进一步,所述拾取单元包括固定在行走单元上的壳体,壳体内设有拾取组件,行走单元的整体高度不低于网球的直径,壳体内部为中空设置,在壳体底部靠近其中部的位置开设有拾取口。
9.进一步,所述壳体外部可拆卸连接有集球箱,拾取组件包括负压泵、进球管和出球管,负压泵固定在壳体内,进球管与负压泵的进气管连通,而出球管与负压泵的出气管连通,进球管为竖向设置,且位于拾取口的正上方,出球管远离负压泵一端伸出壳体与集球箱连通。
10.进一步,所述集球箱的外壁上开设有若干气孔,气孔的孔径小于网球的孔径。这样设置一方面利于气压的释放,另一方面则是将在负压作用下一同进入集球箱的杂质进行排出,保持网球的干净。
11.进一步,所述进球管为电动的伸缩管,且通过控制单元进行控制,在进球管的底部固定连通有球罩,球罩呈筒状,球罩能够通过拾取口与网球场地接触。利用球罩的设置,能
够对网球进行较大范围的定位,同时在网球附近形成一个封闭环境,便于负压系统能够快速将网球吸附到进球管中。
12.进一步,所述球罩内固定有上窄下宽的锥形斗,所述锥形斗的顶部与进球管连通,锥形斗的底部固定在球罩的内壁上。这样设置防止网球在负压作用下进入到球罩与进球管之间的死角处。
13.进一步,所述锥形斗的顶部直径与进球管的内径相同。这样使得网球更容易沿着锥形斗进入到进球管中。
14.相比于现有技术,本发明具有如下有益效果:
15.1、基于视觉传感器的网球拾取机器人,基于识别单元可以准确识别出网球场地中的网球并定位网球拾取点,避免漏捡球的问题,控制单元基于网球拾取点的位置信息,可以精确规划得到拾取路径,使得网球拾取机器人在面对复杂环境时也能实现准确拾取网球,同时行走单元基于网球拾取路径自动行驶至网球拾取点,而不依赖于人工推送至网球拾取点,大幅度提高了网球拾取效率。
16.2、本发明提供的网球捡球机器人,其提供的拾取组件中,利用负压吸附的原理,通过球罩进行定位,能够快速将网球送入到集球箱内,同时其内部设置的锥形斗能够有效防止网球在负压作用下卡入到球罩与进球管之间的死角处,另外在集球箱的外壁上开设若干气孔,一方面利于负压系统的排压,另一方面能够将从球场上吸附的草屑等杂质排出,使得拾取的网球保持干净。
附图说明
17.图1为本发明一种机器视觉的网球自动捡球机器人实施例的控制示意图。
18.图2为本发明一种机器视觉的网球自动捡球机器人实施例中拾取单元的结构示意图。
19.说明书附图中的附图标记包括:识别单元10、控制单元20、行走单元30、拾取单元40、壳体100、拾取口101、集球箱102、气孔103、负压泵104、进球管105、出球管106、球罩107、锥形斗108。
具体实施方式
20.以下结合说明书附图对本发明作进一步详细说明,并给出具体实施方式。
21.实施例基本如图1和图2所示,一种机器视觉的网球自动捡球机器人,包括识别单元10、行走单元30、拾取单元40和控制单元20,其中识别单元10、行走单元30、拾取单元40和控制单元20之间相互电连接,拾取单元40安装在行走单元30上,行走单元30带动拾取单元40移动至网球的拾取点。
22.本实施例中,识别单元10包括视觉传感器,视觉传感器能够实时获取球场上的图像信息,并从图像信息中识别是否存在待拾取的网球,若存在待拾取的网球,则将网球的坐标信号发送给控制单元20,控制单元20中设有plc控制器,控制器基于传感器发送的坐标信号规划行走路径,并控制行走单元30按照该行走路径像坐标点移动;在控制单元20确定网球的拾取路径之后,会基于拾取路径生成相应的行走指令(如向左、向右、加速、减速、停止等),并将行走指令发送至行走单元30,行走单元30则根据行走指令行驶至网球拾取点。
23.此时,控制单元20给拾取单元40发送拾取指令,以使拾取单元40自动完成捡球。由此可见,本发明实施例通过控制单元20控制行走单元30自动行驶至网球拾取点,而不依赖于人工推送至网球拾取点,大幅度提高了网球拾取的效率。
24.另外当识别单元10检测到球场上存在不少于一个网球时,控制单元20能够规划出最优路径以防止出现行走单元30在同一路径上重复行走的问题出现。
25.本实施例中,拾取单元40包括固定在行走单元30上的壳体100,行走单元30的整体高度不低于网球的直径,壳体100内部为中空设置,在壳体100底部靠近其中部的位置开设有拾取口101,在壳体100外部可拆卸连接有集球箱102,集球箱102的外壁上开设有若干气孔103,气孔103的孔径小于网球的孔径。
26.在壳体100内设有拾取组件,本实施例中拾取组件包括负压泵104、进球管105和出球管106,其中负压泵104固定在壳体100内,进球管105与负压泵104的进气管连通,而出球管106与负压泵104的出气管连通,出球管106远离负压泵104一端伸出壳体100与集球箱102连通,进球管105为竖向设置,且位于拾取口101的正上方,本实施例中进球管105为电动的伸缩管,且通过控制单元20进行控制,在进球管105的底部固定连通有球罩107,球罩107呈筒状,球罩107能够通过拾取口101与网球场地接触。
27.在球罩107内固定有上窄下宽的锥形斗108,其中锥形斗108的顶部与进球管105连通,锥形斗108的顶部直径与进球管105的内径相同,锥形斗108的底部固定在球罩107的内壁上,这样负压泵104在工作时,防止网球进入到球罩107与进球管105之间的死角处。
28.本实施例提供的基于视觉传感器的网球拾取机器人,基于识别单元10可以准确识别出网球场地中的网球并定位网球拾取点,避免漏捡球的问题,控制单元20基于网球拾取点的位置信息,可以精确规划得到拾取路径,使得网球拾取机器人在面对复杂环境时也能实现准确拾取网球,同时行走单元30基于网球拾取路径自动行驶至网球拾取点,而不依赖于人工推送至网球拾取点,大幅度提高了网球拾取效率。
29.另外本技术提供的网球捡球机器人,其提供的拾取组件中,利用负压吸附的原理,通过球罩107进行定位,能够快速将网球送入到集球箱102内,同时其内部设置的锥形斗108能够有效防止网球在负压作用下卡入到球罩107与进球管105之间的死角处,另外在集球箱102的外壁上开设若干气孔103,一方面利于负压系统的排压,另一方面能够将从球场上吸附的草屑等杂质排出,使得拾取的网球保持干净。
30.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
31.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。