1.本发明涉及人体体感识别技术领域,具体来说,是一种躯干手臂体感测量条件设定调节装置。
背景技术:
2.躯干肌肉的体感,是人体体感的最主要类别,但躯干的肌肉控制方式不稳定,受姿态、负荷、平衡条件、手部操作影响,会不断切换。想要完全量化表述躯干肌肉的行为和状态,需要基于肌电测量和聚类、长短时神经网络(lstm)等技术,把躯干肌肉群的多维semg信号编码、嵌入为可对比向量、利用rnn、lstm、attention等算法工具完成动作标注。这样,可见或不可见的躯干肌肉行为可以用向量序列量化表述。应用中,能够量化表述姿态、平衡、阻尼等条件,显得十分必要。为了让这种细分行为与外条件,如姿态、速度、平衡、手部任务等,也对外在条件的量化设置提出了要求。
3.而anybody等商用有限元软件对躯干肌肉的行为预测,是基于逆向动力学和人体特殊现象校正的,不能识别手部任务差异和动态平衡条件的影响。手部的微妙姿态控制意图和精确度预期与主观目的相关性高,基于运动监控很难确定其意图,只能通过实验来确定其影响。
技术实现要素:
4.本发明的目的是提供一种躯干手臂体感测量条件设定调节装置,可以精细表达、调节躯干任务,为躯干肌肉协作行为监测以及体感量化识别、跨实验对象躯干行为标注提供条件。
5.本发明的目的是这样实现的:一种躯干手臂体感测量条件设定调节装置,包括:
6.贴地设置的、且可在地面上调节位置的基架;
7.数根直立的立柱,所述立柱可水平调节地连接基架;
8.若干供使用者手持的把手;
9.若干与把手配套的拉绳,所述把手连接拉绳,每根拉绳两端均连接有绳端连接组件,所述绳端连接组件连接立柱;
10.一对l形的旋转调节轴,所述旋转调节轴具有固定连接基架的竖直部,以及可上下旋转调节的水平部,两旋转调节轴左右相对布置;
11.用于支撑人体脚部的脚踏结构;
12.其中,所述脚踏结构包括:
13.支撑板,两旋转调节轴水平部分别固定连接所述支撑板两侧;
14.一圆盘状的转盘,所述转盘旋转连接支撑板,且所述转盘的旋转轴线垂直于支撑板;
15.一对分别支撑人体左右脚的脚踏板,所述转盘可拆卸连接并支撑脚踏板。
16.进一步地,所述支撑板的中央开设有与转盘同轴的转盘安装孔,所述转盘与转盘
安装孔活动配合并以转盘安装孔为旋转基准,所述支撑板活动支撑转盘。
17.进一步地,所述转盘上开设有若干定位孔,所述脚踏板的下板面凸出设置有至少两个下凸柱,定位时所述脚踏板架在转盘上,并使脚踏板的下凸柱可拆卸地插入转盘的任意定位孔中。
18.进一步地,所述立柱配置有支柱调节轨,所述支柱调节轨可水平调节地设于基架上,所述立柱底部可调节地连接支柱调节轨。
19.进一步地,所述绳端连接件包括可移动座,所述可移动座可滑动调节地套接立柱。
20.进一步地,所述可移动座一侧设有连接拉绳端部的接线柱。
21.进一步地,所述接线柱设有接线孔,所述拉绳穿接接线孔。
22.进一步地,所述可移动座另一侧设有螺孔,并在该螺孔中插接有用于锁定可移动座在立柱上具体位置的锁固螺丝。
23.本发明的有益效果在于:
24.1、可调节自由度多,结合传感器,被测者身体的多类姿态、角度、动作阻尼,均得到控制,手接触方式可改,且轨迹易于调节,手部延轨迹运动产生的额外阻尼少,手部行为(包括位置、手动作方式、阻尼)、下肢姿态(倾角、倾角运动过程、位置)、平衡条件(斜坡)、躯干姿态(弯、扭)、目标空间位置均可调节;
25.2、低成本占地少,由核心部件和可拆卸部件组成,便于重组,以适应更多任务;
26.3、安装容易、易调节;
27.4、对手动作的调节方式多样,可调控动作轨迹、抓握方式、阻尼、精确度。
附图说明
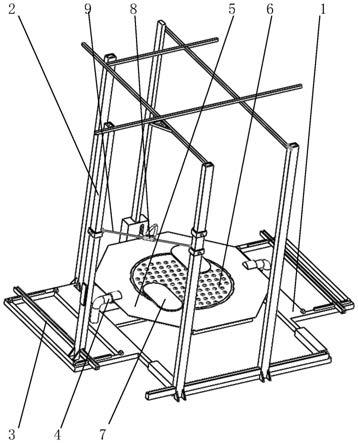
28.图1是本发明的立体图。
29.图2是立柱的可调节连接方式示意图。
30.图3是脚踏板的安装结构示意图。
31.图4是脚踏板的结构示意图。
32.图5是支撑板的转盘安装孔示意图。
33.图6是把手的安装示意图。
34.图7是可移动座的结构示意图。
具体实施方式
35.下面结合附图1-7和具体实施例对本发明进一步说明。
36.如图1所示,一种躯干手臂体感测量条件设定调节装置,包括:
37.贴地设置的、且可在地面上调节位置的基架1,基架1可以在地面上进行纵横调节,调节方式和锁定方式;
38.数根直立的立柱2,立柱2可水平调节地连接基架1,立柱2可以在x或y方向进行调节;
39.若干供使用者手持的把手8,可以是两个或两个以上;
40.若干与把手8配套的拉绳9,把手8连接拉绳9,每根拉绳9两端均连接有绳端连接组件,两个绳端连接组件分别连接两个不同的立柱2,而且每个立柱2可以设有两个或两个以
上可选择的绳端连接组件,以便为拉绳9的固定位置提供更多的选择;
41.一对l形的旋转调节轴4,旋转调节轴4具有固定连接基架1的竖直部,以及可上下旋转调节的水平部,两旋转调节轴4左右相对布置;
42.用于支撑人体脚部的脚踏结构。
43.其中,如图1、3所示,脚踏结构包括:
44.支撑板5,两旋转调节轴4水平部分别固定连接支撑板5两侧;
45.一圆盘状的转盘6,转盘6旋转连接支撑板5,且转盘6的旋转轴线垂直于支撑板5;
46.一对分别支撑人体左右脚的脚踏板7,转盘6可拆卸连接并支撑脚踏板7。
47.其中,如图3所示,支撑板5的中央开设有与转盘6同轴的转盘安装孔5a(如图5所示),转盘6与转盘安装孔5a活动配合并以转盘安装孔5a为旋转基准,支撑板5活动支撑转盘6。
48.结合图3、4所示,上述转盘6上开设有若干定位孔6a,脚踏板7的下板面凸出设置有两个下凸柱7a,定位时脚踏板7架在转盘6上,并使脚踏板7的下凸柱7a可拆卸地插入转盘6的任意两个定位孔6a中,在切换脚踏板7的位置时,可以直接拿下脚踏板7,然后重新放置脚踏板7,使得脚踏板7下板面的两个下凸柱7a插入转盘6的两个定位孔6a中,完成对脚踏板7的快速定位。
49.当人体的左右脚分别站在两个脚踏板7上时,人体可以和转盘6一同旋转,同时,可以驱使支撑板5围绕旋转调节轴4的水平部轴线进行上下旋转。同时,使用者手持把手8。
50.如图1、2所示,上述立柱2配置有支柱调节轨3,支柱调节轨3可水平调节地设于基架1上,调节方向可以是x或y方向,立柱2底部可调节地连接支柱调节轨3,可调节连接的方式可以有很多种,在此不作限定。
51.如图6所示,上述绳端连接件可以是安装在立柱2上的阻尼器或者重物,本实施例中绳端连接件包括可移动座10,可移动座10可滑动调节地套接立柱2。
52.如图6、7所示,上述可移动座10一侧设有连接拉绳9端部的接线柱11,接线柱11设有接线孔11a,拉绳9穿接接线孔11a;上述可移动座10另一侧设有螺孔,并在该螺孔中插接有用于锁定可移动座10在立柱2上具体位置的锁固螺丝12。
53.以上是本发明的优选实施例,本领域普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本发明总的构思的前提下,这些变换或改进都应当属于本发明要求保护范围之内。