1.本发明涉及水下仿生机器人技术领域,具体地说,涉及一种蝠鲼机器人。
背景技术:
2.仿生机器人是仿生学与机器人学交叉结合的产物,是利用生物系统结构、性状、原理、行为以及相互作用来启发与指导机器人的研制;是一个包含机械、电气、光等各种元器件的综合机器人系统,不仅在运动机理和感知模式等方面体现了生物的形态特征,而且能够在未知环境下准确而高效的完成特定的复杂任务。因此,开展仿生机器人领域的研究,将使人类利用科技改造自然的能力得到极大的提高,给人类社会的发展带来巨大的经济效益。随着机器人技术及生物学的发展,仿生机器人技术也得到了长足的发展。
3.蝠鲼身体扁平,体呈菱形,体长可达8米,体重可达1吨以上。蝠鲼具有强大的胸鳍,通过胸鳍的波动运动来产生前进的推力。蝠鲼不仅拥有高效的巡游性能,其机动性也非常强,可以快速灵活地实现原地转向。蝠鲼机器人是基于蝠鲼生物原型,模仿蝠鲼柔性胸鳍的运动特性,利用特殊的机械驱动结构与柔性材料制作而成的机器人。该机器人动力驱动系统模仿蝠鲼胸鳍能在水中完成波动或振荡拍打运动,从而为机器人提供前进的动力。蝠鲼机器人灵活性高,可操纵性强,同时还具备高隐蔽性,能很好地融入环境,对周围环境影响小。该类机器人在容纳摄像头、传感器等探测设备下,能够在远程、狭窄等水域进行独立自主作业,实现水下高隐蔽性的侦察、探测工作。
4.现有的蝠鲼机器人主要由中间的躯干和两侧的柔性胸鳍组成,如公布号为cn102923286a的中国专利文献公开的一种基于智能材料ipmc的仿蝠鲼水下航行器,公布号为cn209142363u的中国专利文献公开的模拟胸鳍系统以及仿生水下机器人,公布号为cn209905021u的中国专利文献公开的仿蝠鲼的水陆两栖水下机器人。上述方案存在均存在诸多问题,尤其是机器人上浮、下潜及转向运动性能较差,不够灵敏,可操纵性有待提高的问题。
技术实现要素:
5.本发明提供一种蝠鲼机器人。提高蝠鲼机器人的转向、上浮或下潜的灵活性,改善可操纵性。
6.为解决上述技术问题,本发明采用以下技术方案予以实现:一种蝠鲼机器人,包括中间躯干、胸鳍、头部、尾部、多个卷线装置;所述中间躯干为可弯曲变形结构;所述胸鳍设置于所述中间躯干的两侧,用于前进或后退;所述头部与所述中间躯干的一端连接;所述尾部与所述中间躯干的另一端连接;所述卷线装置设置在所述头部或者所述尾部,包括第一转动动力、鼓轮、两个卷线;所述鼓轮与所述第一转动动力连接;两个所述卷线的一端分别绕向相反的缠绕在所述鼓轮
上,且其端部与所述鼓轮固定连接;两个所述卷线的另一端沿所述中间躯干的长度方向趋于平行设置,且其端部分别与所述尾部或者所述头部固定连接;所述第一转动动力带动所述鼓轮转动使两个所述卷线分别收紧及放松,使所述中间躯干产生弯曲变形。
7.进一步的,所述中间躯干包括多个躯干单元;相邻的所述躯干单元转动连接;所述头部、所述尾部分别与所述中间躯干的两端转动连接。
8.优选的,相邻所述躯干单元的连接、所述头部与所述中间躯干的连接、所述尾部与所述中间躯干的连接均为单自由度转动连接,其为在横向平面内转动或在竖向平面内转动;各相邻所述躯干单元的连接、所述头部与所述中间躯干的连接、所述尾部与所述中间躯干的连接中包括至少一个横向平面内转动的连接、至少一个竖向平面内转动的连接。
9.进一步的,还包括行走装置,其包括多个曲柄摇块机构、第二转动动力;各所述曲柄摇块机构分别设置在所述中间躯干的两侧,安装在各所述躯干单元上;所述曲柄摇块机构包括曲柄、连杆、摇块;所述曲柄的一端、所述摇块分别与所述躯干单元铰接;所述曲柄的另一端与所述连杆的一端铰接;所述连杆的另一端与所述摇块滑动连接;所述胸鳍包括鳍条、鳍皮,其相互固定连接;所述鳍条的一端与所述摇块固定连接;位于所述中间躯干同侧的相邻的所述曲柄的一端通过行走连接件连接,且位于所述中间躯干端部的所述曲柄的一端连接所述第二转动动力;使位于所述中间躯干同侧的各所述曲柄的一端同角速度转动,且相邻的所述曲柄的一端的距离可调。
10.优选的,所述行走连接件为可伸缩式万向联轴器。
11.优选的,位于所述中间躯干同侧的各所述曲柄设置有相位差。
12.进一步优选的,所述躯干单元与其两侧相邻的所述躯干单元或所述头部或所述尾部的连接分别为横向平面内的转动连接与竖向平面内的转动连接;相邻的所述曲柄设置有90
°
相位差。
13.进一步的,所述躯干单元包括两个基板,其为平板状结构,通过螺柱固定连接,且在两个所述基板之间设置有空隙;所述曲柄摇块机构设置在两个所述基板之间;所述曲柄包括第一曲柄、第二曲柄,其一端分别与两个所述基板铰接;所述连杆的一端位于所述第一曲柄与所述第二曲柄的另一端之间,与所述第一曲柄、所述第二曲柄的另一端铰接。
14.进一步的,所述躯干单元还包括多个漂浮件,其浮力大于其重力,固定设置在两个所述基板之间。
15.优选的,所述卷线装置为两个,设置在所述尾部内;两个所述鼓轮分别横向、竖向设置;在各所述躯干单元上分别设置有相互对应且竖向平齐的第一通孔与第二通孔、横向平齐的第三通孔与第四通孔;两个卷线的一端分别与竖向设置的所述鼓轮固定连接,另一端分别对应穿过各所述第一通孔、各所述第二通孔与所述头部固定连接;另两个所述卷线的一端分别与横向设置的所述鼓轮固定连接,另一端分别对应穿过各所述第三通孔、各所述第四通孔与所述头部固定连接。
16.与现有技术相比,本发明的优点和积极效果是:本发明的蝠鲼机器人在各卷线装置的牵拉下使可弯曲变形的中间躯干发生弯曲变形,从而使位于中间躯干两侧的胸鳍的推力方向也发生变化,且朝向机器人身体形状改变的方向;中间躯干的弯曲变形改变了机器人的冲角或漂角,进而影响蝠鲼机器人自身结构的水动力特性以及胸鳍推力的方向;在胸鳍的驱动下,实现蝠鲼机器人的上浮、下潜及左右转向运动功能。本发明的蝠鲼机器人的中间躯干由于卷线装置的作用,其弯曲变形均布在蝠鲼机器人的整个身体上,改善蝠鲼机器人水动力特性,提高了蝠鲼机器人运动的灵敏性及可操控性。
17.附图说明
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
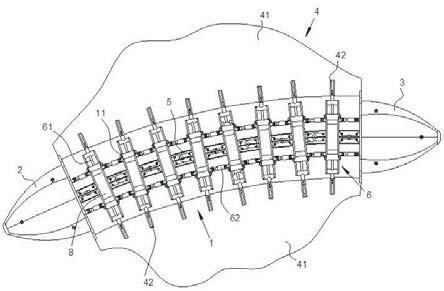
19.图1是本发明所提出的一种蝠鲼机器人的一种实施例的结构示意图;图2是图1中的蝠鲼机器人的实施例的尾部的结构示意图;图3是图1中的蝠鲼机器人的实施例的躯干单元与躯干单元的连接结构示意图;图4是图1中的蝠鲼机器人的实施例的躯干单元与曲柄摇块机构的连接结构示意图;图5是图1中的蝠鲼机器人的实施例的头部的结构示意图;图6是图1中的蝠鲼机器人的实施例发生竖向弯曲变形的结构示意图;图7是图1中的蝠鲼机器人的实施例发生横向弯曲变形的结构示意图;图8是曲柄连接件结构示意图;图9是头部连接件结构示意图;图10是行走连接件结构示意图;图11是摇块结构示意图;图12是鳍条结构示意图;图13是躯干连接件的一种示例的结构示意图。
20.图中,1、中间躯干;2、头部;3、尾部;4、胸鳍;5、卷线装置;6、行走装置;7、躯干连接件;8、漂浮件;9、螺柱;10、密封舱;11、躯干单元; 21、头部底壳;22、头部上盖;31、尾部底壳;32、尾部上盖;41、鳍皮;42、鳍条;51、鼓轮;52、卷线;53、第一转动动力;61、曲柄摇块机构;62、行走连接件;63、曲柄连接件;64、头部连接件;65、尾部连接件;66、第二转动动力;71、第一躯干连接件;72、第二躯干连接件;73、第一转轴;111、基板;611、曲柄;612、连杆;613、摇块;1111、第一通孔;1112、第二通孔;1113、第三通孔;1114、第四通孔;6111、第一曲柄;6112、第二曲柄、711、第一肩部;721、第二肩部。
具体实施方式
21.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中至始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
22.参照图1、图2、图3、图5、图6及图7,本发明的蝠鲼机器人包括中间躯干1、头部2、尾部3、胸鳍4、多个卷线装置5。
23.中间躯干1为可弯曲变形的长条状结构。
24.胸鳍4设置在中间躯干1的两侧,其作摆动运动驱动蝠鲼机器人前进或者后退。
25.头部2位于中间躯干1的一端,并与中间躯干1连接;尾部3位于中间躯干1的另一端,与中间躯干1连接。
26.各卷线装置5设置在头部2或者尾部3,其包括鼓轮51、两个卷线52、第一转动动力53;鼓轮51的转轴与第一转动动力53连接,由第一转动动力53驱动转动;两个卷线52的一端缠绕方向相反的缠绕在鼓轮51上,且端部固定在鼓轮51上;两个卷线52的另一端沿中间躯干1的长度方向趋于平行设置,且端部与尾部3或者头部2固定连接。
27.当第一转动动力53转动时,带动鼓轮51转动,使两个卷线52分别收紧及放松,进而使中间躯干1朝卷线52收紧的一侧弯曲变形,进而在胸鳍4的作用下实现蝠鲼机器人转向、上浮或下潜。
28.本发明的蝠鲼机器人通过至少一个卷线装置5改变头部2、尾部3连同中间躯干1在多个方向组合的弯曲变形,对机器人的冲角或漂角产生影响,进而使位于中间躯干1两侧的胸鳍4的推力方向也发生变化,且朝向机器人身体形状改变的方向,实现蝠鲼机器人的上浮、下潜及左右转向运动功能。各卷线装置5使蝠鲼机器人身体的弯曲变形均布在中间躯干1上,且形变均匀,提高蝠鲼机器人的运动的灵活性及准确性;卷线装置结构简单,降低蝠鲼机器人的制造成本及操控难度。
29.本发明的蝠鲼机器人通过多个卷线装置5实现中间躯干1多个方向的弯曲变形,多个方向的弯曲形变的叠加复合实现中间躯干1 360度全方位的弯曲变形,即实现中间躯干1 360度全方位的转向,以同时实现上浮转向或下潜转向的运动功能,提高了蝠鲼机器人运动的灵活性与可操纵性,提高了蝠鲼机器人转向及上浮或下潜的效率。
30.下面通过具体的实施例对本发明的蝠鲼机器人的具体结构及工作原理进行详细的描述。
31.在一实施例中,参照图1、图2、图3、图5、图6及图7,蝠鲼机器人设置有两个卷线装置5,两个鼓轮51趋于垂直的设置在头部2或者尾部3内。
32.优选的,两个卷线装置5中的其中一个鼓轮51相对尾部3径向水平设置在尾部3内;另一个鼓轮51则相对尾部3径向竖向设置在尾部3内。
33.本实施例的蝠鲼机器人通过两个趋于相互垂直的鼓轮51分别实现中间躯干1的横向弯曲变形及竖向弯曲变形,进而分别实现横向转向及竖向的上浮或下潜。
34.当两个鼓轮51在第一转动动力53的带动下同时进行转动时,则中间躯干1同时出现横向弯曲变形及竖向的弯曲;对横向弯曲及竖向弯曲自动叠加复合,实现中间躯干1 360
°
全方位的弯曲变形,同时实现蝠鲼机器人转向及上浮或者下潜的运动功能。
35.本实施例通过简单结构实现全方位运动功能的控制,提高蝠鲼机器人可操控性,进而提高蝠鲼机器人的控制的灵敏性、灵活性及转向及上浮或者下潜的效率。
36.优选的,头部2及尾部3均为盒体,且头部2为前方尺寸小于后方尺寸的近锥形结构,尾部3则为后方尺寸小于前方尺寸的近锥形结构,符合动力学原理,减小蝠鲼机器人前进的阻力。
37.头部2包括头部上盖22、头部底壳21;头部上盖22与头部底壳21固定连接,形成头部腔体。尾部3包括尾部上盖32、尾部底壳31;尾部上盖32与尾部底壳31固定连接,形成尾部腔体,对设置在其内的鼓轮51及第一转动动力53进行保护。
38.第一转动动力53优选为两个伺服电机,其分别转轴横向、竖向固定设置在尾部腔体内;两个鼓轮51则分别与两个伺服电机的转轴固定连接。
39.在尾部3的前端分别设置有竖向对应的第一通孔1111与第二通孔1112、横向对应的第三通孔1113与第四通孔1114,供两个卷线装置5的卷绳通过。
40.在一实施例中,参照图5,还包括密封舱10,其用于密封设置电池及控制器;密封腔固定设置在头部2或者尾部3内。
41.优选的,密封腔设置在头部腔体内。
42.优选的,头部上盖22与头部底壳21通过螺钉固定连接。尾部上盖32与尾部底壳31通过螺钉固定连接。
43.在一实施例中,参照图1、图2、图3、图5、图6及图7,本实施例的蝠鲼机器人的中间躯干1包括多个躯干单元11;躯干单元11与头部2的连接、躯干单元11与尾部3的连接、相邻躯干单元11的连接均为转动连接,使中间躯干1可弯曲变形。
44.优选的,躯干单元11与头部2的连接、躯干单元11与尾部3的连接,相邻躯干单元11的连接均为单自由度的转动连接,且分别横向设置或竖向设置。
45.为了实现蝠鲼机器人360
°
全方位的弯曲形变,躯干单元11与头部2的连接、躯干单元11与尾部3的连接、相邻躯干单元11的连接至少包括一个横向设置的单自由度的转动连接及一个竖向设置的单自由度的转动连接。
46.优选的,各躯干单元11两端分别与头部2或尾部3或躯干单元11连接,且各躯干单元11两端的连接分别为横向设置的单自由度的转动连接及竖向设置的单自由度的转动连接,使蝠鲼机器人弯曲形变更加的均匀,进而使蝠鲼机器人的转向、上浮或下潜更加的稳定可靠及容易操控。
47.当然,躯干单元11与头部2的连接、躯干单元11与尾部3的连接、躯干单元11之间的连接也可为360
°
全方位转动连接,无需区分横向设置及竖向设置,同样实现蝠鲼机器人360度全方位弯曲变形。
48.在一实施例中,参照图1、图2、图3、图4、图5、图6及图7,各躯干单元11之间的连接、躯干单元11与头部2的连接、躯干单元11与尾部3的连接均通过躯干连接件7实现。
49.躯干连接件7包括第一躯干连接件71、第二躯干连接件72、第一转轴73;第一躯干连接件71的一端与头部2、或尾部3或躯干单元11固定连接,另一端与第二躯干连接件72的一端通过第一转轴73转动连接;第二躯干连接件72的另一端与躯干单元11、或头部2或尾部3固定连接,实现躯干单元11与头部2、或尾部3、或相邻躯干单元11的单自由度转动连接。
50.为了限制躯干单元11之间、躯干单元11与头部2或者尾部3之间的弯曲变形程度,分别在第一躯干连接件71及第二躯干连接件72上分别设置限位件。
51.优选的,限位件为设置在第一躯干连接件71、第二躯干连接件72的外围端部的第一肩部711、第二肩部721,当第一肩部711与第二肩部721抵接时,第一躯干连接件71停止相对第二躯干连接件72的转动。
52.当然,限位件也可以为设置在第一躯干连接件71、第二躯干连接件72的侧部的筋,
当其相互抵接时,停止第一躯干连接件71与第二躯干连接件72的相对运动。
53.当然,躯干连接件也可为行星齿轮式结构,参照图13。
54.在一实施例中,参照图1、图3及图4,本实施的蝠鲼机器人还包括多个漂浮件8,其在水中的浮力大于重力;各漂浮件8分别一一对应设置在各躯干单元11上,且与躯干单元11固定连接,用于平衡蝠鲼机器人的重力,减少耗能及提高灵活性。
55.在一实施例中,参照图1、图3及图4,躯干单元11包括两个基板111,其为平板状结构,通过螺栓或螺柱9固定连接在一起,且两个基板111之间设置有空隙。
56.优选的,漂浮件8设置在躯干单元11的上方,位于两个基板111之间,并通过螺栓或螺柱9与两个基板111固定连接。
57.在各基板111上分别设置有竖向对应的第一通孔1111与第二通孔1112、横向对应的第三通孔1113与第四通孔1114,用于各卷线52穿过及定位。
58.躯干单元11是组成中间躯干1的模块单元,设置不同长度的蝠鲼机器人可通过设置躯干单元11的个数实现,使蝠鲼机器人的长度设置更加的灵活。
59.在一实施例中,参照图1、图2、图3、图4、图5、图6、图7、图8、图9、图10及图11,蝠鲼机器人还包括行走装置6,其包括多个曲柄摇块机构61、多个行走连接件62、两个第二转动动力66,其均分别对应设置在中间躯干1的两侧。
60.曲柄摇块机构61设置在两个基板111之间,包括曲柄611、连杆612、摇块613;曲柄611的一端分别与两个基板111铰接,另一端与连杆612的一端铰接;连杆612的另一端与摇块613可滑动连接;摇块613与两个基板111铰接。
61.位于中间躯干1同侧的相邻的曲柄611的一端通过行走连接件62连接,使曲柄611的一端不在同一轴线上但同角速度转动,且相邻曲柄611的一端之间的距离可调。
62.第二转动动力66设置在头部2内或者尾部3内;位于中间躯干1的端部的曲柄611的一端与第二转动动力66连接,用于驱动行走装置6。
63.相邻的曲柄611设置有相位差,使曲柄611的一端同角速度转动时,摇块613与水平面的夹角不同,从而带动胸鳍4有规律的动作,实现前进或者后退。
64.本实施例的蝠鲼机器人每个躯干单元11都有两套曲柄摇块机构61,对称地位于躯干的两侧,用于驱动两侧的胸鳍4摆动运动。位于中间躯干1同侧的各躯干单元11上的曲柄摇块机构61通过第二转动动力66及行走连接件62实现曲柄611的一端轴向移动且可不在同一轴线上同角速度转动,实现在躯干单元11间传递转动运动,且能通过调整自己的结构以适应机器人的身体的变形。
65.本实施例的蝠鲼机器人的行走装置6只需要两个第二转动动力66,或一个联动的第二转动动力66即可实现行走功能,减少了驱动部件的设置,减小蝠鲼机器人的的体积及重量,降低能源消耗,提高运动灵活性。
66.优选的,第二转动动力66为伺服电机。
67.优选的,行走装置6还包括头部连接件64、尾部连接件65、曲柄连接件63;行走连接件62为可伸缩的万向联轴器。
68.第二转动动力66可设置在头部2或尾部3内,优选设置在头部腔体内;头部连接件64的一端与第二转动动力66的转轴固定连接,另一端与行走连接件62的一端连接适配且连接;头部连接件64穿过头部底壳21,且与头部底壳21可转动连接,使第二转动动力66通过头
部连接件64传出。
69.曲柄连接件63的一端与曲柄611固定连接,且与基板111可转动连接,另一端与行走连接件62的端部连接适配且连接,用于同角速度传递第二转动动力66。
70.位于与尾部3连接的中间躯干1一端的端部的曲柄连接件63的一端与行走连接件62连接,另一端通过尾部连接件65与尾部3可转动连接。
71.优选的,曲柄611包括第一曲柄6111、第二曲柄6112,其一端分别与躯干单元11的两个基板111通过曲柄连接件63铰接;连杆612的一端位于第一曲柄6111、第二曲柄6112的另一端之间,分别与第一曲柄6111、第二曲柄6112的另一端铰接,使曲柄摇块机构61更加稳固及便于安装,提高了曲柄摇块机构61结构的强度、传动的稳定性及组装效率。
72.优选的,摇块613的一端设置有与连杆612的另一端安装适配的收容孔,使连杆612的另一端可在收容孔内滑动。
73.优选的,位于中间躯干1同侧的相邻的曲柄611设置有90度相位差,使连接在曲柄摇块机构61的摇块613上的胸鳍4按照一定的相位差进行规律性摆动,增加蝠鲼机器人运动的灵敏性及可操控性。
74.优选的,曲柄611的一端设置有方孔;曲柄连接件63与曲柄611连接的一端设置为与方孔连接适配的方形,使位于同侧的相邻曲柄611固定连接的同时更容易保证90
°
的相位差,方便曲柄611的安装,提高蝠鲼机器人的安装效率。
75.优选的,尾部连接件65包括与曲柄连接件63的方形的一端连接适配的方形孔;尾部3包括供曲柄连接件63穿过的通孔;曲柄连接件63的方形的一端穿过上述的通孔与尾部连接件65固定连接;尾部连接件尺寸大于上述的通孔,位于尾部3内,用于对与其连接的曲柄连接件63限位。
76.在一实施例中,参照图1、图3、图4、图11及图12,胸鳍4包括鳍皮41、多个鳍条42,各鳍条42趋于平行设置且分别与鳍皮41固定连接;鳍条42的一端与摇块613固定连接。当摇块613摆动时,鳍条42摆动,带动鳍皮41有规律摆动,实现前进或者后退。
77.具体为,鳍皮41由橡胶、塑料等具有一定柔性的材料制成;鳍条42的一端设置为筒状,其与摇块613的一端安装适配;在鳍条42的一端及对应摇块613的一端设置有对应的孔,鳍条42的一端与摇块613的一端安装且通过螺钉连接对应孔固定连接。提高胸鳍4安装的效率及稳固性。
78.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
79.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
80.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内
部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
81.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
82.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
83.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。