1.本实用新型涉及体育训练辅助器械领域,特别是一种拾球机器人。
背景技术:
2.随着人们生活水平的提高,乒乓球、网球、高尔夫球等球类运动越来越受到人们欢迎。运动员在进行上述球类的训练过程中,球会被打得满地都是,如果不能及时捡起来,则容易被人踩坏或者将人绊倒。
3.然而,要捡起大量散落在地上的球,通常是由人工弯腰用手拾球或者手持拾球工具进行拾球。由于日常训练过程中,需要拾球的次数较多,人工拾球的方式不仅浪费时间,影响工作效率,而且劳动强度大。
技术实现要素:
4.本实用新型的目的是克服现有技术的不足,而提供一种拾球机器人。它解决了目前球类训练过程中,采用人工拾球的方式费时、费力、劳动强度大的问题。
5.本实用新型的技术方案是:拾球机器人,包括主框架、圆柱球笼、转轴、主动轮、从动轮及驱动电机;主框架呈一端开口,另一端封闭的c形框架,其包括两面侧壁和连接在两面侧壁之间的后壁,后壁中心处设有用于安装从动轮的缺口;圆柱球笼包括骨架和分隔条,骨架包括两块相对布置的圆形端板和固定连接在两块圆形端板之间的刚性杆,两个圆形端板相对的表面为内表面,相背的表面为外表面;分隔条的数量有多条,所有的分隔条绕圆柱球笼的轴心线呈环形均布,并拉直连接在两块圆形端板之间;所有的分隔条与两块圆形端板合围形成圆柱形的收纳腔,收纳腔将刚性杆包容在内,任意两条相邻的分隔条之间形成连通至收纳腔的进出球口;当圆柱球笼横向放置在地面上时,两块圆形端板的外圆面与地面接触,分隔条与地面不接触;圆柱球笼在两端外侧分别通过转轴转动安装在主框架的开口中;转轴一端连接在圆形端板外表面中心处,另一端与主框架的侧壁连接;两根转轴的轴心线与圆柱球笼的轴心线重合布置;两个主动轮转动安装在主框架两面侧壁的外侧,并呈对称布置;从动轮转动安装在主框架后壁的缺口中;两个驱动电机分别安装在主框架两面侧壁的内侧,两个驱动电机的机轴分别与两个主动轮关联,以分别驱动对应的主动轮转动;当拾球机器人平放在水平地面上时,圆柱球笼的两块圆形端板的外圆面、两个主动轮、从动轮均与地面接触。
6.本实用新型进一步的技术方案是:主框架在封闭端的内侧设有围挡,围挡将从动轮包围在内。
7.本实用新型再进一步的技术方案是:两个主动轮和一个从动轮呈等腰三角形分布。
8.本实用新型更进一步的技术方案是:分隔条与圆形端板的连接点与圆形端板内表面边缘相距1-3cm。
9.本实用新型更进一步的技术方案是:分隔条与圆形端板的连接点与圆形端板内表
面边缘相距2cm。
10.本实用新型更进一步的技术方案是:当拾球机器人平放在水平地面上时,主框架后壁下端与地面之间形成5-10cm的条形间隙。
11.本实用新型与现有技术相比具有如下优点:
12.1、可代替人工进行拾球操作,拾球机器人运行过程中,通过呈等腰三角形分布的两个主动轮和一个从动轮,以及两个圆形端板的外圆面,共同与地面接触,移动平稳性好。
13.2、两个主动轮分别通过驱动电机控制转动,可实现拾球机器人差速转向,使拾球操作更加灵活便捷。
14.3、主框架后壁下端与地面之间设形成条形间隙,在拾球机器人拾球的过程中,当地面上的杂物(所述杂物低于条形间隙的高度)进入主框架内侧后,可通过条形间隙排出到主框架外部。
15.以下结合图和实施例对本实用新型作进一步描述。
附图说明
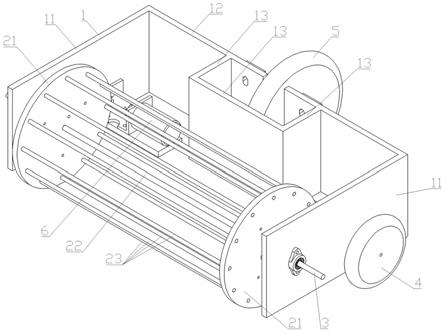
16.图1为本实用新型的结构示意图。
17.图例说明:主框架1;侧壁11;后壁12;围挡13;圆形端板21;刚性杆22;分隔条23;转轴3;主动轮4;从动轮5;驱动电机6。
具体实施方式
18.实施例1:
19.如图1所示,拾球机器人,包括主框架1、圆柱球笼、转轴3、主动轮4、从动轮5及驱动电机6。
20.主框架1呈一端开口,另一端封闭的c形框架,其包括两面侧壁11和连接在两面侧壁11之间的后壁12,后壁12中心处设有用于安装从动轮的缺口。
21.圆柱球笼包括骨架和分隔条23,骨架包括两块相对布置的圆形端板21和固定连接在两块圆形端板21之间的刚性杆22,两个圆形端板21相对的表面为内表面,相背的表面为外表面。分隔条23的数量有多条,所有的分隔条23绕圆柱球笼的轴心线呈环形均布,并拉直设置在两块圆形端板21之间,分隔条23的两端分别固连在两块圆形端板21的内表面相互正对的位置上。所有的分隔条23与两块圆形端板21合围形成圆柱形的收纳腔,收纳腔将刚性杆22包容在内,任意两条相邻的分隔条23之间形成连通至收纳腔的进出球口。当圆柱球笼横向放置在地面上时,两块圆形端板21的外圆面与地面接触,分隔条23与地面不接触。圆柱球笼在两端外侧分别通过转轴3转动安装在主框架的开口中。转轴3一端连接在圆形端板21外表面中心处,另一端与主框架1的侧壁11连。两根转轴3的轴心线与圆柱球笼的轴心线重合布置。
22.两个主动轮4转动安装在主框架1的两面侧壁11的外侧,并呈对称布置。从动轮5转动安装在主框架1后壁12的缺口中。两个驱动电机6分别安装在主框架1两面侧壁11的内侧,两个驱动电机6的机轴分别与两个主动轮4关联,以分别驱动对应的主动轮4转动。
23.当拾球机器人平放在水平地面上时,圆柱球笼的两块圆形端板11的外圆面、两个主动轮4、从动轮5均与地面接触。
24.优选,主框架1在封闭端的内侧设有围挡13,围挡13将从动轮5包围在内。围挡13可避免地面上的杂物被卷入从动轮5中,对从动轮5起到保护作用。
25.优选,两个主动轮4和一个从动轮5呈等腰三角形分布。该结构保证了拾球机器人移动过程中的稳定性。
26.优选,当拾球机器人平放在水平地面上时,主框架1后壁12下端与地面之间形成5-10cm的条形间隙。基于该结构,在拾球机器人拾球的过程中,当地面上的杂物(所述杂物低于条形间隙的高度)进入主框架1内侧后,可通过条形间隙排出到主框架1外部。
27.简述本实用新型的使用:
28.需要拾球时,将拾球机器人平放在地面上,然后启动两个驱动电机6,两个驱动电机6分别驱动对应的主动轮4转动,进而带动圆柱球笼和从动轮5转动,使整个拾球机器人向前移动;当地面上待拾取的球与圆柱球笼的两条分隔条23接触后,会将两条分隔条23之间的进出球口撑开,并随着圆柱球笼的滚动将球挤入收纳腔中。
29.需要转向时,两个驱动电机6采用不同的运行状态,使两个主动轮4产生速度差,从而实现差速转向。
技术特征:
1.拾球机器人,其特征是:包括主框架、圆柱球笼、转轴、主动轮、从动轮及驱动电机;主框架呈一端开口,另一端封闭的c形框架,其包括两面侧壁和连接在两面侧壁之间的后壁,后壁中心处设有用于安装从动轮的缺口;圆柱球笼包括骨架和分隔条,骨架包括两块相对布置的圆形端板和固定连接在两块圆形端板之间的刚性杆,两个圆形端板相对的表面为内表面,相背的表面为外表面;分隔条的数量有多条,所有的分隔条绕圆柱球笼的轴心线呈环形均布,并拉直连接在两块圆形端板之间;所有的分隔条与两块圆形端板合围形成圆柱形的收纳腔,收纳腔将刚性杆包容在内,任意两条相邻的分隔条之间形成连通至收纳腔的进出球口;当圆柱球笼横向放置在地面上时,两块圆形端板的外圆面与地面接触,分隔条与地面不接触;圆柱球笼在两端外侧分别通过转轴转动安装在主框架的开口中;转轴一端连接在圆形端板外表面中心处,另一端与主框架的侧壁连接;两根转轴的轴心线与圆柱球笼的轴心线重合布置;两个主动轮转动安装在主框架两面侧壁的外侧,并呈对称布置;从动轮转动安装在主框架后壁的缺口中;两个驱动电机分别安装在主框架两面侧壁的内侧,两个驱动电机的机轴分别与两个主动轮关联,以分别驱动对应的主动轮转动;当拾球机器人平放在水平地面上时,圆柱球笼的两块圆形端板的外圆面、两个主动轮、从动轮均与地面接触。2.如权利要求1所述的拾球机器人,其特征是:主框架在封闭端的内侧设有围挡,围挡将从动轮包围在内。3.如权利要求2所述的拾球机器人,其特征是:两个主动轮和一个从动轮呈等腰三角形分布。4.如权利要求3所述的拾球机器人,其特征是:分隔条与圆形端板的连接点与圆形端板内表面边缘相距1-3cm。5.如权利要求4所述的拾球机器人,其特征是:分隔条与圆形端板的连接点与圆形端板内表面边缘相距2cm。6.如权利要求5所述的拾球机器人,其特征是:当拾球机器人平放在水平地面上时,主框架后壁下端与地面之间形成5-10cm的条形间隙。
技术总结
拾球机器人,包括主框架、圆柱球笼、转轴、主动轮、从动轮及驱动电机;主框架呈一端开口,另一端封闭的C形框架;圆柱球笼包括骨架和分隔条,骨架包括两块相对布置的圆形端板和固定连接在两块圆形端板之间的刚性杆;分隔条的数量有多条,所有的分隔条绕圆柱球笼的轴心线呈环形均布,并拉直连接在两块圆形端板之间;当拾球机器人平放在水平地面上时,圆柱球笼的两块圆形端板的外圆面、两个主动轮、从动轮均与地面接触。本实用新型可代替人工进行拾球操作,拾球机器人行进过程中,通过呈等腰三角形分布的两个主动轮和一个从动轮,以及两个圆形端板的外圆面,共同与地面接触,移动平稳性好。移动平稳性好。移动平稳性好。
技术研发人员:江高宇 彭俊杰 刘顺 官俊昕
受保护的技术使用者:南华大学
技术研发日:2021.06.02
技术公布日:2022/2/7