1.本发明涉及人体体感仿真技术技术领域,具体来说,是一种用于上肢训练的交互体感仿真设备。
背景技术:
2.交互仿真过程中,视觉和听觉信号可以由基于视频的设备,或监测相对位移、角度、速度、加速度的设备(陀螺仪传感器、goneometer等均为此类),或者由动作捕捉设备跟踪人体关键点来提供。而视觉信号和听觉信号的实时反馈,由vr、mr等设备,或屏幕提供。当前的视觉信号和身体姿态都已经很好的被纳入交互系统。但对力学相关体感的模拟还相对简单,在格斗、太极拳、搬运、拿取等场景下,上肢感觉明显难以对应。
3.在上肢的阻尼体感方面,尤其是在模拟上肢的拳击、太极拳、推拉、拿取等复杂交互过程中,其接触目标处于空间位置变化和运动中,运动路径可能性大。动作期间的可变阻尼和命中目标的力学反馈很难模拟。而这类场景中对感觉的仿真和反馈,决定了交互场景的真实性。简单的类似于沙袋的打击目标,或者常见的没有阻尼的手部动作,不能提供逼真的感觉。
4.对应打击目标的三维空间位置,及时提供针对主要上肢姿态和阻尼的力学反馈,显得十分必要。为了让这种细分上肢行为与外部条件,如姿态、速度、平衡、手部任务等相对应,应该有专门设备提供特定体感。
技术实现要素:
5.本发明的目的是提供一种用于上肢训练的交互体感仿真设备,可以精细调节上肢活动时所受阻尼的体感力学效果。
6.本发明的目的是这样实现的:一种用于上肢训练的交互体感仿真设备,包括:
7.主体框架,所述主体框架具有容纳使用者在其内活动的活动空间,所述主体框架的两侧设有容纳使用者自由进出活动空间的开口;
8.一对分别被使用者左右手持握的手持组件;
9.两对倾斜的上拉绳,每一对上拉绳对应一个手持组件,每一对上拉绳下端分别连接手持组件上部左右两侧;
10.三套从左往右依次间隔地安装在主体框架顶部的上阻尼机构,从俯瞰视角看,每个手持组件处于相邻两上阻尼机构之间,每个上阻尼机构连接有与上拉绳连接的牵引绳,所述上阻尼机构在上拉绳的牵引下进行伸缩活动,居中的上阻尼机构通过其牵引绳与左手持组件的右侧上拉绳和右手持组件的左侧上拉绳一同连接;
11.两对倾斜的下拉绳,每一对下拉绳对应一个手持组件,每一对下拉绳上端分别连接手持组件下部左右两侧;
12.三个从左往右依次间隔地安装在主体框架前侧内部的下绳连杆,所述下绳连杆倾斜布置且其上端与主体框架上下转动地连接,从俯瞰视角看,每个手持组件处于相邻两下
绳连杆之间,居中的下绳连杆与左手持组件的右侧下拉绳和右手持组件的左侧下拉绳一同连接,左右下绳连杆分别与另两根下拉绳相连;
13.三个下阻尼器,每个下绳连杆均对应一个下阻尼器,所述下阻尼器两端分别连接下绳连杆杆身、主体框架。
14.进一步地,每个下绳连杆均设有沿其长度方向间隔排布的、用于连接下拉绳下端的定位孔。
15.进一步地,每个上阻尼机构均配置有顶固定座,所述顶固定座可拆卸地固定安装在主体框架的顶部。
16.进一步地,所述主体框架顶部设有三排顶定位槽,每排顶定位槽具有若干个,每排顶定位槽均对应一个上阻尼机构的顶固定座,且从前向后依次间隔分布,所述顶固定座可选择性地锁定于其中一个顶定位槽中。
17.进一步地,所述主体框架包括三根水平的上支杆,每根上支杆均对应一排顶定位槽,每排顶定位槽沿其对应的上支杆长度方向分布于对应的上支杆上侧。
18.进一步地,所述主体框架包括:
19.三根直立的、从左往右依次间隔排布的、构成主体框架前侧的前柱,所述下绳连杆、下阻尼器与前柱一一相连;
20.两根直立的、构成主体框架后侧的后柱;
21.一个后上撑台,所述后上撑台固定连接两根后柱上端;
22.其中,所述上支杆与前柱一一对应,所述上支杆前端与前柱上端固定连接,所述上支杆后端与后上撑台固定连接。
23.进一步地,所述主体框架还包括:
24.贴地的底架,所述底架与所有前柱底端、所有后柱底端固定连接;
25.水平的、供使用者的双脚踩踏的底板,所述底板固定连接于底架之上。
26.进一步地,所述手持组件包括:
27.圆环状的手环,每对上拉绳与手环的上部左右两侧连接,每对下拉绳与手环的下部左右两侧连接;
28.直接被使用者持握的直杆状握柄,所述握柄两端相对滑动地连接手环的内圆壁,所述握柄沿手环的径向延伸。
29.进一步地,所述手环开设有若干沿其周长方向均布的定绳孔,所述上拉绳、下拉绳选择性地穿接定绳孔。
30.进一步地,所述上阻尼机构包括:
31.阻尼器底座,其可拆卸地固定于顶固定座之上;
32.上可移座二,其沿牵引绳牵引方向水平滑动地连接于阻尼器底座之上;
33.上阻尼器二,所述上阻尼器二沿牵引绳牵引方向水平伸缩设置,所述上阻尼器二两端分别连接阻尼器底座、上可移座二;
34.上可移座一,其沿牵引绳牵引方向水平滑动地连接于上可移座二之上,所述上可移座一与牵引绳的牵引端连接;
35.上阻尼器一,所述上阻尼器一沿牵引绳牵引方向水平伸缩设置,所述上阻尼器一两端分别连接上可移座一、上可移座二。
36.本发明的有益效果在于:
37.1、在使用时,使用者双手持握两手持组件的握柄,可以驱使握柄在手环内旋转,同时,手环拉拽上拉绳和下拉绳,上拉绳拉动上阻尼机构,下拉绳拉拽下绳连杆时受到下阻尼器的阻尼作用,因此,在使用者手部运动时,手环上部左右侧和下部左右侧均能受到阻尼作用,以保障上肢在进行上下左右多向运动时的柔和程度,且手腕的运动自由度较高;
38.2、安装容易、易调节、无需动力、兼容性强;
39.3、可灵活控制和调节双手的空间轨迹,同时在上拉绳和下拉绳的牵引作用下,人机交互行为更加柔和;
40.4、空间范围明确,避免造成误伤;
41.5、由于上阻尼机构的顶固定座的锁定位置可以选择,并且下拉绳可选择性地连接任意一个下绳连杆的定位孔,从而使得手持组件的上下阻尼位置均能得到精准调节,使得上肢运动过程中受到的阻尼作用处于可控状态。
附图说明
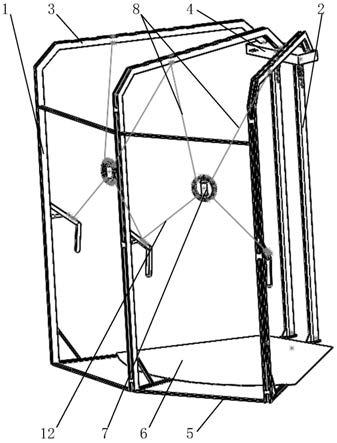
42.图1是本发明的立体图。
43.图2是本发明的俯视图。
44.图3是下绳连杆的安装结构示意图。
45.图4是上阻尼机构的示意图。
46.图5是手持组件的示意图。
47.图6是顶定位槽的示意图。
具体实施方式
48.下面结合附图1-6和具体实施例对本发明进一步说明。
49.如图1-6所示,一种用于上肢训练的交互体感仿真设备,包括:
50.主体框架,主体框架具有容纳使用者在其内活动的活动空间,所述主体框架的两侧设有容纳使用者自由进出活动空间的开口;
51.一对分别被使用者左右手持握的手持组件;
52.两对倾斜的上拉绳8,每一对上拉绳8对应一个手持组件,每一对上拉绳8下端分别连接手持组件上部左右两侧;
53.三套从左往右依次间隔地安装在主体框架顶部的上阻尼机构10,从俯瞰视角看,如图2所示,每个手持组件处于相邻两上阻尼机构10之间,每个上阻尼机构10连接有与上拉绳8连接的牵引绳9,上阻尼机构10在上拉绳8的牵引下进行伸缩活动,居中的上阻尼机构10通过其牵引绳9与左手持组件的右侧上拉绳8和右手持组件的左侧上拉绳8一同连接;
54.两对倾斜的下拉绳12,每一对下拉绳12对应一个手持组件,每一对下拉绳12上端分别连接手持组件下部左右两侧;
55.三个从左往右依次间隔地安装在主体框架前侧内部的下绳连杆13,如图1、3所示,下绳连杆13倾斜布置且其上端与主体框架上下转动地连接,从俯瞰视角看,如图2所示,每个手持组件处于相邻两下绳连杆13之间,居中的下绳连杆13与左手持组件的右侧下拉绳12和右手持组件的左侧下拉绳12一同连接,左右下绳连杆13分别与另两根下拉绳12相连;
56.三个下阻尼器14,每个下绳连杆13均对应一个下阻尼器14,下阻尼器14两端分别连接下绳连杆13杆身、主体框架。
57.其中,每个下绳连杆13均设有沿其长度方向间隔排布的、用于连接下拉绳12下端的定位孔13a。使得下拉绳12的阻尼作用处于可控状态。
58.每个上阻尼机构10均配置有顶固定座11,顶固定座11可拆卸地固定安装在主体框架的顶部。如图1、6所示,上述主体框架顶部设有三排顶定位槽3a,每排顶定位槽3a具有若干个,每排顶定位槽3a均对应一个上阻尼机构10的顶固定座11,且从前向后依次间隔分布,顶固定座11可选择性地锁定于其中一个顶定位槽3a中。使得上拉绳8的阻尼作用处于可控状态。
59.如图1、6所示,上述主体框架包括三根水平的上支杆3,每根上支杆3均对应一排顶定位槽3a,每排顶定位槽3a沿其对应的上支杆3长度方向分布于对应的上支杆3上侧。使得上支杆3能够坚固地支撑起上阻尼机构10。
60.上述主体框架包括:
61.三根直立的、从左往右依次间隔排布的、构成主体框架前侧的前柱1,下绳连杆13、下阻尼器14与前柱1一一相连;
62.两根直立的、构成主体框架后侧的后柱2;
63.一个后上撑台4,后上撑台4固定连接两根后柱2上端;
64.贴地的底架5,底架5与所有前柱1底端、所有后柱2底端固定连接;
65.水平的、供使用者的双脚踩踏的底板6,底板6固定连接于底架5之上。
66.其中,上支杆3与前柱1一一对应,上支杆3前端与前柱1上端固定连接,上支杆3后端与后上撑台4固定连接。左边的前柱1和左边的后柱2之间形成一个出入口,右边的前柱1和右边的后柱2之间形成另一个出入口,以便使用者自由进出。
67.如图5所示,上述手持组件包括:
68.圆环状的手环7b,每对上拉绳8与手环7b的上部左右两侧连接,每对下拉绳12与手环7b的下部左右两侧连接;
69.直接被使用者持握的直杆状握柄7a,握柄7a两端相对滑动地连接手环7b的内圆壁,握柄7a沿手环7b的径向延伸,使用者可手持握柄7a,使得握柄7a能够在手环7b的内圆壁中进行旋转活动,增加手部运动的自由度。
70.其中,手环7b开设有若干沿其周长方向均布的定绳孔7c,上拉绳8、下拉绳12选择性地穿接定绳孔7c,从而灵活地调节上拉绳8、下拉绳12的连接点位置,以使上拉绳8、下拉绳12的位置灵活可调。
71.上述上阻尼机构10可以沿牵拉方向设置为若干级,本实施例中,如图4所示,上阻尼机构10包括:
72.阻尼器底座10e,其可拆卸地固定于顶固定座11之上;
73.上可移座二10c,其沿牵引绳9牵引方向水平滑动地连接于阻尼器底座10e之上;
74.上阻尼器二10d,上阻尼器二10d沿牵引绳9牵引方向水平伸缩设置,上阻尼器二10d两端分别连接阻尼器底座10e、上可移座二10c;
75.上可移座一10a,其沿牵引绳9牵引方向水平滑动地连接于上可移座二10c之上,上可移座一10a与牵引绳9的牵引端连接;
76.上阻尼器一10b,上阻尼器一10b沿牵引绳9牵引方向水平伸缩设置,上阻尼器一10b两端分别连接上可移座一10a、上可移座二10c。
77.其中,上阻尼机构10在使用过程中,以上阻尼机构10被压缩为例,上拉绳8通过牵引绳9产生向下的拉拽作用力时,上可移座一10a先压缩上阻尼器一10b,然后,上可移座二10c受到上阻尼器一10b的轴向力之后产生偏移,使得上可移座二10c压缩上阻尼器二10d,从而使得上拉绳8能够受到上阻尼器一10b和上阻尼器二10d的双重阻尼作用,使得运动过程中具有更为稳定的缓冲性能,而且,上阻尼器二10d的阻尼能力强于上阻尼器一10b的阻尼能力,能够形成两级缓冲,增强缓冲效果,从而充分保障上拉绳8受到的阻尼效果。
78.以上是本发明的优选实施例,本领域普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本发明总的构思的前提下,这些变换或改进都应当属于本发明要求保护范围之内。