1.本发明涉及康复训练装置技术领域,尤其涉及一种神经内科用具有自适应调节结构的康复训练装置。
背景技术:
2.神经内科是关于神经方面的二级学科,不属于内科概念。主要诊治脑血管疾病(脑梗赛、脑出血)、偏头痛、脑部炎症性疾病(脑炎、脑膜炎)、脊髓炎、癫痫、痴呆、代谢病和遗传病、三叉神经疼、坐骨神经病、周围神经病及重症肌无力等。
3.神经系统障碍困扰着许多的病人,神经系统障碍影响最大的就是肢体运动能力,特别是四肢的运动能力,现有的手部康复训练装置在实际应用时,无法灵活的对手指进行康复训练,由于每个使用者的手指长度与位置乃至拇指的角度均有不同的差异,现有的康复训练装置无法进行适应调整满足不同患者的使用,在实际应用具有一定的局限性。
技术实现要素:
4.本发明解决的问题在于提供一种神经内科用具有自适应调节结构的康复训练装置,解决了神经系统障碍困扰着许多的病人,神经系统障碍影响最大的就是肢体运动能力,特别是四肢的运动能力,现有的手部康复训练装置在实际应用时,无法灵活的对手指进行康复训练,由于每个使用者的手指长度与位置乃至拇指的角度均有不同的差异,现有的康复训练装置无法进行适应调整满足不同患者的使用,在实际应用具有一定的局限性的技术问题。
5.为了实现上述目的,本发明采用了如下技术方案:一种神经内科用具有自适应调节结构的康复训练装置,包括调节座,所述调节座侧壁对称安装有支撑臂,所述支撑臂上贯穿安装有支撑杆,且支撑杆两端均设置有挡块,所述支撑杆两端分别滑动安装有滑把,所述支撑杆两端外侧套装有弹簧,且弹簧两端分别与滑把以及支撑臂连接;所述调节座顶部对称滑动安装有滑座,所述滑座顶端安装有支撑座,所述支撑座一侧安装有固定训练机构、第一移动训练机构和两个第二移动训练机构,所述支撑座另一侧滑动安装有第三移动训练机构,且固定训练机构、第一移动训练机构、第二移动训练机构和第三移动训练机构结构相同。
6.优选的,所述调节座端部安装有第一电机,所述调节座顶侧开设有第一滑槽,且第一电机输出端位于第一滑槽内安装有第一螺纹杆,且第一螺纹杆与滑座螺纹连接。
7.优选的,所述固定训练机构、第一移动训练机构、第二移动训练机构和第三移动训练机构均包括u型座,所述u型座上水平安装有转轴,所述转轴上对称轴承安装有连接板,且连接板顶侧安装有与支撑座平齐的按压板,所述转轴两端分别套装有扭簧,且扭簧两端分别与连接板以及u型座连接。
8.优选的,所述支撑座一侧开设有第二滑槽,所述支撑座上安装有第二电机,且第二
电机输出端位于第二滑槽内安装有第二螺纹杆,且第二螺纹杆与第一滑块螺纹连接,且第一滑块与第一移动训练机构的u型座连接。
9.优选的,所述第一移动训练机构的u型座上设置有第一侧板,所述第二移动训练机构的u型座上设置有第二侧板,所述第一侧板上安装有双向电机,且双向电机输出端安装有与第二侧板螺纹连接的第三螺纹杆,所述第一侧板上安装有贯穿第二侧板的滑杆。
10.优选的,所述支撑座另一侧开设有第三滑槽,所述支撑座上安装有第三电机,且第三电机输出端位于第三滑槽内安装有第四螺纹杆,所述第四螺纹杆与第二滑块螺纹连接,所述第二滑块侧壁安装有支撑板,且支撑板底侧安装有马达,所述马达输出端贯穿支撑板与转板连接,且转板与第三移动训练机构的u型座连接。
11.优选的,该康复训练装置的具体操作步骤如下:步骤一:首先患者通过手持滑把在支撑杆上滑动,通过弹簧的弹性形变对患者的手臂进行康复训练;步骤二:通过第一电机工作带动两端螺纹方向相反的第一螺纹杆旋转,进而带动螺纹连接的滑座在第一滑槽内移动,调整支撑座的间距,此时通过第二电机带动第二螺纹杆转动,带动螺纹连接的第一滑块在第二滑槽内移动,带动第一移动训练机构和第二移动训练机构同时移动,同时通过双向电机带动第三螺纹杆旋转,与螺纹连接的第二侧板配合实现第二移动训练机构的移动,进而对固定训练机构、第一移动训练机构和第二移动训练机构的位置进行调整;步骤三:第三电机工作带动第四螺纹杆旋转,带动螺纹连接的第二滑块在第三滑槽内移动,对第三移动训练机构的位置调整,同时通过支撑板上的马达带动转板旋转,对第三移动训练机构的角度进行调整;步骤四:调整后的固定训练机构、第一移动训练机构、第二移动训练机构和第三移动训练机构的按压板与手指对应,此时将手掌放置于支撑座上,手指分别与按压板对应,按压按压板时,按压板通过连接板在转轴上转动,通过扭簧的弹性形变和恢复对患者的手指灵活度进行康复训练。
12.本发明的有益效果是:第一电机工作带动两端螺纹方向相反的第一螺纹杆旋转,进而带动螺纹连接的滑座在第一滑槽内移动,调整支撑座的间距,将训练部位与患者的手部间距进行适配;通过第二电机带动第二螺纹杆转动,带动螺纹连接的第一滑块在第二滑槽内移动,带动第一移动训练机构和第二移动训练机构同时移动,同时通过双向电机带动第三螺纹杆旋转,与螺纹连接的第二侧板配合实现第二移动训练机构的移动,进而对固定训练机构、第一移动训练机构和第二移动训练机构的位置进行调整,第三电机工作带动第四螺纹杆旋转,带动螺纹连接的第二滑块在第三滑槽内移动,对第三移动训练机构的位置调整,同时通过支撑板上的马达带动转板旋转,对第三移动训练机构的角度进行调整,此时实现装置与不同患者的每个手指长度、间距以及角度进行适配对应,便于与不同患者进行适配,便于康复训练的正常进行。
附图说明
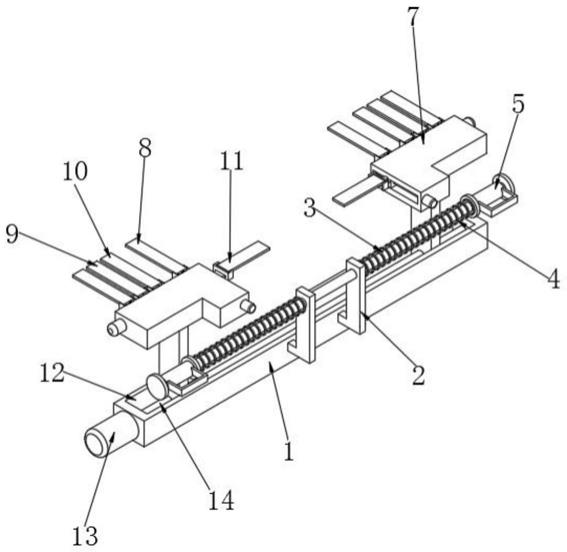
13.图1为本发明整体结构示意图;
图2为本发明整体正视图;图3为本实用新固定训练机构结构示意图;图4为本发明第二滑块安装结构示意图。
14.图例说明:1、调节座;2、支撑臂;3、支撑杆;4、弹簧;5、滑把;6、滑座;7、支撑座;8、固定训练机构;9、第一移动训练机构;10、第二移动训练机构;11、第三移动训练机构;12、第一滑槽;13、第一电机;14、第一螺纹杆;15、第二滑槽;16、第二电机;17、第二螺纹杆;18、第一滑块;19、u型座;20、按压板;21、连接板;22、转轴;23、扭簧;24、第一侧板;25、双向电机;26、第二侧板;27、第三螺纹杆;28、第三电机;29、第三滑槽;30、第四螺纹杆;31、第二滑块;32、支撑板;33、马达;34、转板。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
16.下面给出具体实施例。
17.参见图1~图4,一种神经内科用具有自适应调节结构的康复训练装置,包括调节座1,调节座1侧壁对称安装有支撑臂2,支撑臂2上贯穿安装有支撑杆3,且支撑杆3两端均设置有挡块,支撑杆3两端分别滑动安装有滑把5,支撑杆3两端外侧套装有弹簧4,且弹簧4两端分别与滑把5以及支撑臂2连接,患者通过手持滑把5在支撑杆3上滑动,通过弹簧4的弹性形变对患者的手臂进行康复训练;调节座1顶部对称滑动安装有滑座6,调节座1端部安装有第一电机13,调节座1顶侧开设有第一滑槽12,且第一电机13输出端位于第一滑槽12内安装有第一螺纹杆14,且第一螺纹杆14与滑座6螺纹连接,第一电机13工作带动两端螺纹方向相反的第一螺纹杆14旋转,进而带动螺纹连接的滑座6在第一滑槽12内移动,调整支撑座7的间距,滑座6顶端安装有支撑座7,支撑座7一侧安装有固定训练机构8、第一移动训练机构9和两个第二移动训练机构10,支撑座7另一侧滑动安装有第三移动训练机构11,且固定训练机构8、第一移动训练机构9、第二移动训练机构10和第三移动训练机构11结构相同,固定训练机构8、第一移动训练机构9、第二移动训练机构10和第三移动训练机构11均包括u型座19,u型座19上水平安装有转轴22,转轴22上对称轴承安装有连接板21,且连接板21顶侧安装有与支撑座7平齐的按压板20,转轴22两端分别套装有扭簧23,且扭簧23两端分别与连接板21以及u型座19连接,将手掌放置于支撑座7上,手指分别与按压板20对应,按压按压板20时,按压板20通过连接板21在转轴22上转动,通过扭簧23的弹性形变和恢复对患者的手指灵活度进行康复训练;支撑座7一侧开设有第二滑槽15,支撑座7上安装有第二电机16,且第二电机16输出端位于第二滑槽15内安装有第二螺纹杆17,且第二螺纹杆17与第一滑块18螺纹连接,且第一滑块18与第一移动训练机构9的u型座19连接,第二电机16带动第二螺纹杆17转动,带动螺纹连接的第一滑块18在第二滑槽15内移动,第一移动训练机构9的u型座19上设置有第一侧板24,第二移动训练机构10的u型座19上设置有第二侧板26,第一侧板24上安装有双向
电机25,且双向电机25输出端安装有与第二侧板26螺纹连接的第三螺纹杆27,第一侧板24上安装有贯穿第二侧板26的滑杆,通过双向电机25带动第三螺纹杆27旋转,与螺纹连接的第二侧板26配合实现第二移动训练机构10的移动,且通过滑杆起到导向作用;支撑座7另一侧开设有第三滑槽29,支撑座7上安装有第三电机28,且第三电机28输出端位于第三滑槽29内安装有第四螺纹杆30,第四螺纹杆30与第二滑块31螺纹连接,第二滑块31侧壁安装有支撑板32,且支撑板32底侧安装有马达33,马达33输出端贯穿支撑板32与转板34连接,且转板34与第三移动训练机构11的u型座19连接,第三电机28工作带动第四螺纹杆30旋转,带动螺纹连接的第二滑块31在第三滑槽29内移动,对第三移动训练机构11的位置调整,同时通过支撑板32上的马达33带动转板34旋转,对第三移动训练机构11的角度进行调整。
18.该康复训练装置的具体操作步骤如下:步骤一:首先患者通过手持滑把5在支撑杆3上滑动,通过弹簧4的弹性形变对患者的手臂进行康复训练;步骤二:通过第一电机13工作带动两端螺纹方向相反的第一螺纹杆14旋转,进而带动螺纹连接的滑座6在第一滑槽12内移动,调整支撑座7的间距,此时通过第二电机16带动第二螺纹杆17转动,带动螺纹连接的第一滑块18在第二滑槽15内移动,带动第一移动训练机构9和第二移动训练机构10同时移动,同时通过双向电机25带动第三螺纹杆27旋转,与螺纹连接的第二侧板26配合实现第二移动训练机构10的移动,进而对固定训练机构8、第一移动训练机构9和第二移动训练机构10的位置进行调整;步骤三:第三电机28工作带动第四螺纹杆30旋转,带动螺纹连接的第二滑块31在第三滑槽29内移动,对第三移动训练机构11的位置调整,同时通过支撑板32上的马达33带动转板34旋转,对第三移动训练机构11的角度进行调整;步骤四:调整后的固定训练机构8、第一移动训练机构9、第二移动训练机构10和第三移动训练机构11的按压板20与手指对应,此时将手掌放置于支撑座7上,手指分别与按压板20对应,按压按压板20时,按压板20通过连接板21在转轴22上转动,通过扭簧23的弹性形变和恢复对患者的手指灵活度进行康复训练。
19.第一电机13工作带动两端螺纹方向相反的第一螺纹杆14旋转,进而带动螺纹连接的滑座6在第一滑槽12内移动,调整支撑座7的间距,将训练部位与患者的手部间距进行适配;通过第二电机16带动第二螺纹杆17转动,带动螺纹连接的第一滑块18在第二滑槽15内移动,带动第一移动训练机构9和第二移动训练机构10同时移动,同时通过双向电机25带动第三螺纹杆27旋转,与螺纹连接的第二侧板26配合实现第二移动训练机构10的移动,进而对固定训练机构8、第一移动训练机构9和第二移动训练机构10的位置进行调整,第三电机28工作带动第四螺纹杆30旋转,带动螺纹连接的第二滑块31在第三滑槽29内移动,对第三移动训练机构11的位置调整,同时通过支撑板32上的马达33带动转板34旋转,对第三移动训练机构11的角度进行调整,此时实现装置与不同患者的每个手指长度、间距以及角度进行适配对应,便于与不同患者进行适配,便于康复训练的正常进行。
20.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其
发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。