1.本实用新型涉及运动仿真结构领域,尤其涉及一种乌龟爬行的仿真结构。
背景技术:
2.随着我国旅游业的兴起,游乐设施制造行业得到了前所未有的发展。据统计,我国国内旅游消费及旅游业总收入的增长速度一直高于居民消费支出和国内生产总值之上,因此每个游乐设施制造企业都要提高自己的生产技术,这样才在市场上占有竞争力。
3.游乐场中,动物的动态仿真能够吸引游客,在游乐行业内,特别是园区内还缺少乌龟的动态仿真设备。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.鉴于上述现有技术的不足,本实用新型的目的在于提供一种乌龟爬行的仿真结构。
6.本实用新型的技术方案如下:
7.一种乌龟爬行的仿真结构,其特征在于,包括:
8.底板;
9.摇动件,所述第一摇动板设置在所述底板上;
10.驱动件,所述驱动件设置在所述底板上,并与所述摇动件通过连接件连接;
11.其中,所述驱动件通过所述连接件驱动所述摇动件在所述底板上摇动。
12.所述的乌龟爬行的仿真结构,其中,所述摇动件可转动设置在所述底板上。
13.所述的乌龟爬行的仿真结构,其中,所述驱动件与所述连接件通过转动件连接,所述转动件的第一端与所述驱动件固定连接,所述转动件的第二端与所述连接件可转动连接。
14.所述的乌龟爬行的仿真结构,其中,所述驱动件包括:电机座以及设置在所述电机座上的电机,所述电机上设置有转轴,所述转轴与所述转动件连接。
15.所述的乌龟爬行的仿真结构,其中,所述转动件包括转动板以及设置在所述转动板上的套筒,所述套筒套设在所述转轴上。
16.所述的乌龟爬行的仿真结构,其中,所述摇动件上设置有固定件,所述连接件与所述固定件可转动连接。
17.所述的乌龟爬行的仿真结构,其中,所述摇动件包括:第一摇动板和第二摇动板,所述连接件包括第一连杆和第二连杆,所述第一连杆与所述第一摇动板连接,所述第二连杆与所述第二摇动板连接,所述第一连杆与所述第二连杆连接,所述第一连杆和所述第二连杆的连接处与所述驱动件和所述连接件的连接处一致。
18.所述的乌龟爬行的仿真结构,其中,还包括尾部板件,所述尾部板件设置在所述底板上。
19.所述的乌龟爬行的仿真结构,其中,所述底板和所述摇动板均与所述尾部板件板件可转动连接。
20.所述的乌龟爬行的仿真结构,其中,还包括头部板件,所述头部板件设置在所述底板上。
21.有益效果:本实用新型提供了一种乌龟爬行的仿真结构,包括:底板;摇动件,所述摇动件设置在所述底板上;驱动件,所述驱动件设置在所述底板上,并与所述摇动件通过连接件连接;其中,所述驱动件通过所述连接件驱动所述摇动件在所述底板上摇动。通过驱动件驱动连接件运动,连接件使摇动件摇动,摇动件的摇动仿真乌龟的腿部运动,从而实现乌龟爬行的仿真动作。
附图说明
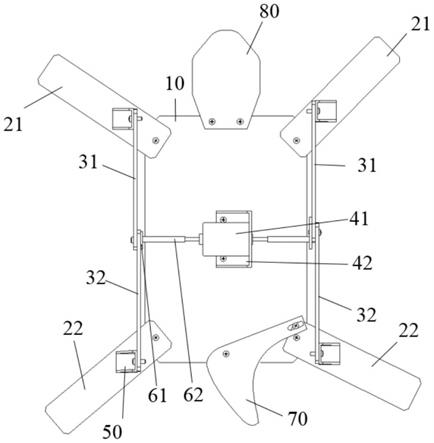
22.图1为本实用新型的一种乌龟爬行的仿真结构的结构示意图。
23.附图标记:10、底板,21、第一摇动板,22、第二摇动板,31、第一连杆,32、第二连杆,41、电机,42、电机座,50、固定件,61、转动板,62、套筒,70、尾部板件,80、头部板件。
具体实施方式
24.本实用新型提供一种乌龟爬行的仿真结构,为使本实用新型的目的、技术方案及效果更加清楚、明确,以下对本实用新型进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
25.请参见图1,本实用新型提供的一种乌龟爬行的仿真结构包括:底板10、摇动件以及驱动件,所述摇动件设置在所述底板10上,所述驱动件设置在所述底板10上,并与所述摇动件通过连接件连接,其中,所述驱动件通过所述连接件驱动所述摇动件在所述底板10上摇动。
26.具体地,该仿真结构是模仿乌龟的爬行动作进行设计,底板10 相当于乌龟的身体部分,摇动件相当于乌龟的腿部,可以是任意一只腿,摇动件的一端与底板10连接,其另一端悬空并可以以与底板10 的连接处为轴心进行转动,摇动件上连接有一连接件,通过连接件与驱动件连接,摇动件的摆动通过驱动件进行控制,驱动件固定在底板 10上,通过驱动件驱动第一连接件,从而带动摇动件的悬空部分摆动,从而能够模仿乌龟的腿部运动,达到仿真乌龟爬行的效果。
27.在一种实施方式中,所述摇动件可转动设置在所述底板10上。摇动件与底板10的可转动连接使得摇动件在底板10上能够前后摆动,从而仿真乌龟的爬行动作。
28.在一种实施方式中,所述驱动件与所述连接件通过转动件连接,所述转动件的第一端与所述驱动件固定连接,所述转动件的第二端与所述连接件可转动连接。
29.具体地,驱动件是通过转动转动件的方式驱动连接件运动,由于转动件与驱动件是固定连接,与连接件是可转动连接,在驱动件转动转动件的过程中,转动件的第二端以其第一端为轴心进行转动,从而带动连接件与转动件的连接处进行转动,使连接件对摇动件进行推拉运动,从而带动摇动件进行摆动。
30.在一种实施方式中,所述驱动件包括:电机座42以及设置在所述电机座42上的电机41,所述电机41上设置有转轴,所述转轴与所述转动件连接。
31.具体地,电机座42设置在底板10上,电机座42上设置电机41,通过电机座42将电机41固定在底座上,转动件设置在电机41的转轴上,转轴带动转动件进行转动。
32.在一种实施方式中,所述转动件包括转动板61以及设置在所述转动板61一端的套筒62,所述套筒62套设在所述转轴上。
33.具体地,转动板61上设置有一长形套筒62,通过长形套筒62 套设在转轴上,将转动件与转轴连接,同时转动板61与连接件可转动连接,由于套筒62的轴心与转动板61和连接件的连接处有一定的距离,因此转轴的转动总能使转动板61和连接件的连接处围绕转轴进行转动。也可以根据需要将套筒62与转动板61和连接件的连接处设置一定的距离,从而改变摇动件的摇动幅度,控制乌龟的运动。
34.在一种实施方式中,所述摇动件上设置有固定件50,所述连接件与所述固定件50可转动连接。
35.具体地,固定件50包括固定底部和设置在固定底部上的固定侧壁,固定底部与摇动件固定连接,固定侧壁与连接件可转动连接,转动件的转动会带动连接件与转动件的连接处绕转轴旋转,由于连接件与固定件50可转动的连接,从而使转轴能够带动连接处的旋转,连接件通过固定件50带动摇动件的前后摆动。
36.在一种实施方式中,所述摇动件包括:第一摇动板21和第二摇动板22,所述连接件包括第一连杆31和第二连杆32,所述第一连杆 31与所述第一摇动板21连接,所述第二连杆32与所述第二摇动板 22连接,所述第一连杆31与所述第二连杆32连接,所述第一连杆 31和所述第二连杆32的连接处与所述驱动件和所述连接件的连接处一致。
37.具体地,第二摇动板22与第一摇动板21相邻设置,第一摇动板 21与第二摇动板22相当于乌龟的两支相邻的腿。第一摇动板21与第二摇动板22通过连接件连接,一个连接件同时控制两条腿。连接件包括两个连杆,两个连杆分别与第一摇动板21和第二摇动板22连接,且两个连杆之间的连接点与驱动件和连接件的连接点相同。由于乌龟有四条腿,还需要再设置一组第一摇动板21和第二摇动板22,则电机41要同时驱动四条腿,电机41上只有左右两个转轴,通过一个转轴转动同一点来同时拉动和推动第一摇动板21和第二摇动板22 的运动,可以采用一个电机41即可同时驱动乌龟四条腿的运动,可以节省成本以及降低装置的复杂度。
38.在一种实施方式中,所述乌龟爬行的仿真结构还包括尾部板件 70,所述尾部板件70设置在所述底板10上。
39.具体地,尾部板件70相当于乌龟的尾巴,尾部板件70与底板 10可以转动连接也可以固定连接,尾部板件70设置在两个腿部之间,可以是第一摇动板21与第二摇动板22之间,较好的,尾部板件70 设置在两个第一摇动板21之间或两个第二摇动板22之间,这样尾部板件70不会妨碍到连接件的运动。
40.在一种实施方式中,所述底板10和所述摇动板均与所述尾部板件70板件可转动连接。
41.具体地,尾部板件70的可转动可以使其在摇动件在摆动过程中随之摆动,增加爬行运动的仿真效果。尾部板件70与摇动件中的其中一个摇动板连接,可以与第一摇动板21连接或第二摇动板22连接,具体根据作为乌龟后腿的摇动板确定,尾部板件70和摇动件的连接点与摇动件和底板10的连接点不相同,通过摇动件的摆动带动尾部板件70以尾部板件
70与底板10的连接点为支点进行摆动。
42.在一种实施方式中,所述乌龟爬行的仿真结构还包括头部板件 80,所述头部板件80设置在所述底板10上。
43.综上所述,本实用新型提供了一种乌龟爬行的仿真结构,包括:底板;摇动件,所述摇动件设置在所述底板上;驱动件,所述驱动件设置在所述底板上,并与所述摇动件通过连接件连接;其中,所述驱动件通过所述连接件驱动所述摇动件在所述底板上摇动。通过驱动件驱动连接件运动,连接件使摇动件摇动,摇动件的摇动仿真乌龟的腿部运动,从而实现乌龟爬行的仿真动作。
44.应当理解的是,本实用新型的应用不限于上述的举例,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。