1.本发明涉及智慧路灯基建领域,具体地涉及一种可升降灯臂的多功能路灯杆。
背景技术:
2.随着城市功能的不断完善,城市照明已成为体现城市形象的综合市政工程,在城市的交通安全、社会治安、市民生活和市容市貌等涉及民生的城市服务工作中有着举足轻重的地位,发挥着不可替代的作用,也越来越受到人们的关注。部分地区城市照明不能满足使用需求,特别是市政道路路灯工程不完善、故障率高,已经成为市民生活中反应最为激烈的问题之一,直接关系到市民出行安全和使用效果。为了更好地提高城市市政道路照明质量,满足人们出行生活和交通安全需求,实现投资成本节约化、使用维护方便化,需要不断加强市政道路路灯工程设计和维护管理技术的分析和研究。
3.伴随随着智慧多功能灯杆产业的快速发展,落地项目越来越多,其挂载设备也越来越复杂,设备日常检修维护成为困扰智慧多功能灯杆设施管理机构的一大难题。根据《城市道路照明管理规定》,城市建设行政主管部门必须对道路照明设施管理机构建立严格的检查和考核制度,在严格限定的时间内及时督促更换和修复破损的照明设施,使亮灯率不低于95%,部分省市要求比较高亮灯率要达到98%以上。
4.然而路灯维护登高作业危险性较高:一是在马路上作业,人多车多、现场情况复杂,容易发生交通事故;其二,维修路灯时人在登高车上作业,有高处坠落的危险,包括高处作业人员坠落,高处坠物伤人,如灯具脱落,车倾倒等;其三,触电危险,如电线电缆漏电、电箱漏电等;其四、在施工和维护过程中可能会出现倒杆伤人事故。除了近乎苛刻的维护条件和安全问题,路灯的维护费用也较高,这就要求智慧多功能杆企业提高加载设备和系统的可靠性,也对灯杆设计的易维护性提出了更高的要求。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种可升降灯臂的多功能路灯杆,快速解决路灯杆及智慧多功能灯杆挂载设备的日常维护问题,而且便于增添灯杆的附加功能,达到为人们提供更加舒适的照明条件和更加丰富的服务项目的双重目的。
6.一种可升降灯臂的多功能路灯杆,包括底座、支撑肋和灯杆,所述底座上固定连接灯杆,所述灯杆底部外沿焊接起加固作用的支撑肋,所述灯杆上设有灯臂和挂载设备,所述灯杆上还设有:
7.灯臂升降装置,用于升降所述灯臂,并与所述灯臂定位装置配合以限制灯臂的最大上升高度;
8.灯臂定位装置,用于限制所述灯臂的运动方向和运动路径;
9.电气控制装置,用于给灯臂和需供电的挂载设备供电,还用于监测灯臂和挂载设备的运行状态,将挂载设备的数据信息传递给上位机操作系统。
10.进一步地,所述灯臂升降装置,包括:
11.灯臂导轨,固定在所述灯臂的一侧,用于与所述灯臂定位装置配合,以限制所述灯臂的升降;
12.牵引绳,用于拉动所述灯臂及灯臂导轨,以实现所述灯臂的升降运动;
13.挡板,水平设置于所述灯臂定位装置的外沿,用于限制所述灯臂的最大上升高度;
14.卷扬筒,设于所述灯杆底部内侧,用于收放所述牵引绳。
15.进一步地,所述灯臂定位装置,包括:
16.定位导轨,用于与所述灯臂导轨配合限制所述灯臂的运动方向和运动路径;
17.楔块,设于所述定位导轨的上方,用于在所述灯臂上升至最大高度时与灯臂导轨连接,以承载灯臂的重量;
18.助力锤连杆机构,设于楔块的上方,用于在所述灯臂开始下降时给灯臂一个助力以应对摩擦阻力。
19.进一步地,所述电气控制装置,包括:
20.分线供电装置,包括分线器和总线空气开关,用于给需供电的挂载设备供电;
21.传感器,用于检测所述挂载设备的运行状态以及检测周围环境信息;
22.下位机控制系统,用于接收所述传感器信号并通过无线或有线传输的方式向上位机操作系统传输信号。
23.进一步地,所述灯杆的内部设有杆内线路分仓,包括五个分仓线路通道,分别为第一牵引绳仓、第二牵引绳仓、强电仓、弱电仓和楔块拉动线仓。
24.进一步地,所述牵引绳有两根,其中一根牵引绳中心包裹路灯供电线,另一根为纯牵引绳,两根牵引绳分别从第一牵引绳仓和第二牵引绳仓穿出。
25.进一步地,所述灯杆顶部开设有两个通孔,通孔分别焊接l型牵引绳导管,两根牵引绳分别从两个牵引绳导管穿出。
26.进一步地,所述灯臂顶部设有两个定位管,两根牵引绳从所述牵引绳导管穿出后通过定位管与所述灯臂连接,并且定位管的位置与所述牵引绳导管位置相对应,定位管可插入所述牵引绳导管中,以实现灯臂上升过程中的首次定位。
27.进一步地,所述楔块沿水平方向单自由度移动,通过焊接在楔块尾部的弹簧控制其移动范围,所述弹簧的另一端焊接在所述灯臂上。
28.进一步地,所述助力锤连杆机构的底部设有一个滑轮,所述楔块通过其楔面与滑轮配合,所述滑轮利用杠杆原理控制助力锤连杆机构顶端的助力锤沿垂直方向运动,以实现当需要灯臂下降时,所述助力锤能够给灯臂一个垂直向下的推力,帮助灯臂顺利从所述定位导轨内滑出。
29.与现有技术相比,本发明具有如下的有益效果:
30.针对路灯维修难度和风险大的问题,提供了一种可升降灯臂的多功能路灯杆,设有灯臂升降装置,只需要一名维修人员在地面拉动牵引绳即可实现灯臂的上升与下降,不需要登高操作,大幅度减小换灯操作的难度,有效消除了维修路灯时潜在的安全隐患。
31.本发明通过灯臂升降装置和灯臂定位装置的配合,实现灯臂上升过程中的两次定位。
32.本发明的电气控制装置,不仅可以对挂载设备集中供电和控制通断,而且配有传感器,传感器信号通过下位机控制系统发送至上位机操作系统,人们可实时查看路灯杆内
部的各种信息,包括实时检测路灯是否发生故障,便于及时报警和安排维修工作,还包括一键呼救按钮按压传感器,便于遇到问题的杆旁行人及时呼救等。
附图说明
33.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
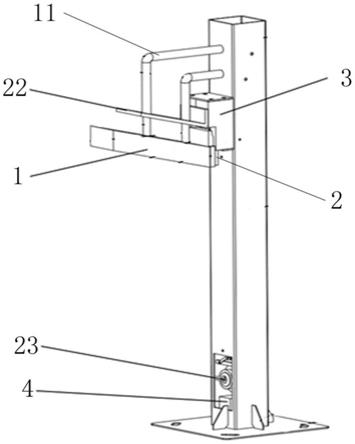
34.图1为本发明一实施例的可升降灯臂的多功能路灯杆的结构示意图;
35.图2为本发明一实施例的可升降灯臂的多功能路灯杆的灯臂升降装置的结构示意图;
36.图3为本发明一实施例的可升降灯臂的多功能路灯杆的灯臂定位装置的结构示意图;
37.图4为本发明可升降灯臂的多功能路灯杆的杆内线路分仓的结构示意图;
38.图5为本发明可升降灯臂的多功能路灯杆的电气控制装置的结构示意图;
39.图6为本发明可升降灯臂的多功能路灯杆的卷扬筒的结构示意图;
40.图中:1为灯臂、2为灯臂升降装置,3为灯臂定位装置,4为电气控制装置,5为杆内线路分仓,11为牵引绳导管,12为定位管,21为灯臂导轨、22为挡板,23为卷扬筒,31为定位导轨,32为楔块,33为助力锤连杆机构,34为滑轮,35为助力锤,41为分线供电装置,42为传感器,43为下位机控制系统,51为第一牵引绳仓,52为第二牵引绳仓,53为强电仓,54为弱电仓,55为楔块拉动线仓,211为定位孔,231为轴承环带支撑,232为卷筒,233为牵引绳通道,234为传动轴,235为航空插座。
具体实施方式
41.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
42.如图1所示,为本发明一实施例的可升降灯臂的多功能路灯杆的结构示意图,图中包括灯臂1、灯臂升降装置2、灯臂定位装置3以及电气控制装置4。其中,灯臂升降装置2,用于升降灯臂1,并与灯臂定位装置3配合以限制灯臂1的最大上升高度;灯臂定位装置3,用于限制灯臂1的运动方向和运动路径;电气控制装置4,用于给灯臂1和需供电的挂载设备供电,还用于监测灯臂1和挂载设备的运行状态,将挂载设备的数据信息传递给上位机操作系统。
43.如图2所示,灯臂升降装置2,包括灯臂导轨21、牵引绳、挡板22和卷扬筒23。其中,灯臂导轨21固定在灯臂1的一侧,与灯臂1作为一个整体一同上升与下降,并且在该整体上升到一定位置后,灯臂导轨21通过两侧面的斜面与灯臂定位装置3配合,对该整体限定定位。牵引绳用于拉动灯臂1及灯臂导轨21,以实现灯臂1的升降运动;挡板22水平设置于灯臂定位装置3的外沿,用于限制灯臂1的最大上升高度;卷扬筒23设于灯杆底部内侧,用于收放牵引绳。本实施例中,只需要一名维修人员在地面拉动牵引绳即可实现灯臂的上升与下降,不需要登高操作,大幅度减小换灯操作的难度,有效消除了维修路灯时潜在的安全隐患。
44.如图3所示,灯臂定位装置3,包括定位导轨31、楔块32、助力锤连杆机构33。其中,定位导轨31用于与灯臂导轨21配合限制灯臂1的运动方向和运动路径;楔块32设于定位导轨31的上方,用于在灯臂1上升至最大高度时与灯臂导轨21连接,以承载灯臂1的重量;助力锤连杆机构33设于楔块32的上方,用于在灯臂1开始下降时给灯臂1一个助力以应对摩擦阻力。
45.在一些实施例中,灯臂定位装置3还包括限位开关,用于在灯臂1上升至期望位置时切断电源。
46.如图4所示,灯杆的内部设有杆内线路分仓5,包括五个分仓线路通道,分别为第一牵引绳仓51、第二牵引绳仓52、强电仓53、弱电仓54和楔块拉动线仓55。灯杆上开设有若干便于安装挂载设备的孔,杆内线路分仓5中的强电仓53和弱电仓54在相对应的高度上也需要打孔,便于挂载设备的供电线和信号线走线。
47.如图5所示,电气控制装置4,包括分线供电装置41、传感器42、下位机控制系统43。其中,分线供电装置41包括分线器和空气开关,用于给需供电的挂载设备供电,空气开关用于电路总线的通断,分线器用于将一条电路总线分支为几条供电线,为路灯杆的挂载设备供电并走杆内线路分仓5中的强电仓53。传感器42包括温湿度传感器、电流传感器和一键呼救按钮等,用于检测所述挂载设备的运行状态以及检测周围环境信息等,传感器类型不只限于本发明所述,可以根据实际需求增加传感器;下位机控制系统43用于接收传感器信号并通过无线或有线传输的方式向上位机操作系统传输信号。
48.在一些实施例中,牵引绳有两根,其中一根牵引绳中心包裹路灯供电线,另一根为纯牵引绳,两根牵引绳分别从第一牵引绳仓51和第二牵引绳仓52穿出。
49.在一些实施例中,灯臂导轨21上设有定位孔211,定位孔211用于卡接楔块32。楔块32沿水平方向单自由度移动,通过焊接在楔块32尾部的弹簧控制其移动范围,弹簧的另一端焊接在灯臂1上。助力锤连杆机构33的底部设有一个滑轮34,滑轮34利用杠杆原理控制助力锤连杆机构33顶端的助力锤35沿垂直方向运动。并且,楔块32连接有楔块拉动线,楔块拉动线的末端穿过楔块拉动线仓55固定于灯杆底部。
50.当需要换灯操作时,拉动楔块拉动线将楔块32从灯臂导轨21中的定位孔211中移出。楔块32通过其楔面与滑轮34配合,即当楔块32向压缩弹簧方向移动时,滑轮34会向上运动,因此带动助力锤连杆机构33运动,使连接的助力锤35向下运动,使助力锤35能够给灯臂1一个垂直向下的推力,帮助灯臂1顺利从定位导轨31内滑出。
51.在一些实施例中,灯杆顶部开设有两个通孔,通孔分别焊接l型牵引绳导管11,两根牵引绳分别从两个牵引绳导管11穿出,在牵引绳导管11转角处以及通孔内侧均设有滚轮,用于牵引绳的顺利拉动。灯臂1顶部设有两个定位管12,两根牵引绳从牵引绳导管11穿出后通过定位管12与灯臂1连接,并且定位管12的位置与牵引绳导管11位置相对应,定位管12可插入牵引绳导管11中,以实现灯臂1上升过程中的首次定位,两根定位管12上端均为圆锥面,随着灯臂1上升会自动插入牵引绳导管11中。并且,灯臂导轨21的两侧面为外斜面,随着灯臂1上升至一定位置时,该斜面会与定位导轨31配合,限定灯臂1运动自由度只为垂向移动,当灯臂1上升至期望位置时,弹簧会将楔块32推入定位孔211中,此时灯臂1上升操作完成,楔块32承载灯臂1整体的重量。
52.在一些实施例中,如图6所示,卷扬筒23的轴向两端均有轴承环带支撑231,轴承环
带支撑231的外侧一端焊接固定在灯杆内壁上;卷扬筒23的卷筒232上设有牵引绳通道233,用于穿出包裹供电线的牵引绳;在卷扬筒23的传动轴234上安装有航空插座235,航空插座235通过夹紧机构固定在卷扬筒23的传动轴234上。电气控制装置4中为路灯供电的电线,从电气控制装置4穿出后连接航空插头,该航空插头接入航空插座235后,即可为路灯通电。另外,为防止电气控制装置4直接与地面接触,可在电气控制装置4的底部增加垫块。
53.下面针对可升降灯臂的多功能路灯杆的具体工作过程,来对本发明作进一步的介绍。
54.当路灯无故障正常照明时,将电气控制装置4中为路灯供电的电线的航空插头与航空插座235连接,闭合电气控制装置4中的空气开关,此时灯杆上的全部设备均可通电且正常工作。
55.当路灯发生故障熄灭时,电气控制装置4中的电流传感器将检测到路灯电路电流异常,下位机控制系统接收到电流传感器的信号后会将故障信息发送至上位机操作系统,提醒维修人员及时到场维修。维修人员需携带电机和电源,到发生故障的路灯杆后,先断开空气开关,将航空插头从航空插座235中拔出,拉动楔块拉动线,使楔块32压缩弹簧移动并从灯臂导轨21的定位孔211中移出,楔块32的楔面推动滑轮34使助力锤35给灯臂导轨21一个推力,使灯臂1能够从灯臂定位装置3中顺利滑下,与此同时,打开电机转动卷扬筒23使灯臂1下落。当灯臂1下落到一定位置后,维修员工即可对路灯进行更换操作。
56.当路灯更换操作结束后,先将限位开关的电线串联在电机电源的电路中,此时限位开关处于常闭状态,打开电机转动使灯臂1上升。当灯臂1上升至一定高度时,定位管12先分别插入牵引绳导管11中,此后继续上升,灯臂导轨21的两侧的外斜面会与定位导轨31接触,限定灯臂1只有垂向自由度,继续上升后,灯臂导轨21压缩弹簧至楔块32能够伸入灯臂导轨21的定位孔211内,此时灯臂1上升操作完成,灯臂导轨21会与灯臂定位装置3中的限位开关触碰,使限位开关处于常开状态,也即断开电机电源的电路,此时维修工作完成。最后闭合空气开关,并将下位机控制系统复位,使该路灯杆恢复正常工作。
57.当需要挂载更多的设备时,只需将设备固定在灯杆上挂载设备的打孔处,在供电线穿进孔后,还需进行强弱电分仓,即将强电线和弱电线分别通过杆内线路分仓5的强电仓53和弱电仓54的打孔处,然后将强电线接入电气控制装置4中的分线器中,将弱电线接入下位机控制系统中。
58.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。上述各优选特征在互不冲突的情况下,可以任意组合使用。