1.本发明实施例涉及除氧器液位控制技术领域,具体涉及一种除氧器群液位协调控制方法及系统。
背景技术:
2.当前在负荷较为稳定时,除氧器液位控制可以实现自动控制,但在负荷波动时,自动控制无法保证,仍旧需要人工干预或者人工操作。热负荷和电负荷时常变化,造成锅炉负荷和凝结水的变化,造成除氧器液位的变化,造成除氧器温度的变化。传统单回路的控制方式,只有在液位发生变化后,采取调整,调整的量是试探性的,不能快速稳定除氧器液位。在负荷波动稍大时,即会造成控制回路的不稳定,需要人工干预或者人工操作。尤其是在补水能力受限的情况下,各除氧器出现抢水现象,不能保证除氧器液位的安全控制。
3.由于在手动操作时,对不断变化的工况调节不及时,造成锅炉汽包液位和汽机运行不是很稳定,比如负荷波动时,除氧器水位跟不上,造成汽包液位的大起大落。这些问题的存在对整个机组的安全运行、经济运行都会带来不同程度的影响,运行的安全性和稳定性得不到有效保证。
4.另外,现有技术多是从单台除氧器出发,对单台除氧器的液位进行控制,多是单回路控制。这样,除氧器间都是孤立控制,每台除氧器的调节能力有限,在负荷波动加大时,不能有效协调各除氧器的出力。
5.将除氧器单独控制,通过对除氧器液位设定,通过进水阀门调节除氧器液位,但在负荷波动较大,或者在负荷较高,补水能力受限的情况下,除氧器就会出现抢水现象,不会顾及其他除氧器的实际情况,一味地根据单台设备进行阀门的操作,会造成其他除氧器可能补不上水的情况发生,受管道布局的影响,阀门虽然开大,但进水量可能不会增大,距离补水侧较近的除氧器补充水位就便利一些,造成除氧器液位高低不齐,液位低的会造成除氧器的安全隐患。
技术实现要素:
6.为此,本发明实施例提供一种除氧器群液位协调控制方法及系统,解决了目前无法有效实现除氧器液位在全工况下的自动控制,以及无法确保除氧器群各除氧器间的液位均衡等技术问题。
7.为了实现上述目的,本发明实施例提供如下技术方案:
8.第一方面,本发明实施例提供了一种除氧器群液位协调控制方法,所述方法包括:
9.获取除氧器群平均液位偏差和各个除氧器的液位偏差率;
10.利用所述除氧器群平均液位偏差进行整体液位控制,实现除氧器群整体出力与外界需求达到平衡;
11.利用各个除氧器的液位偏差率进行液位协调控制,实现各个除氧器的液位保持均衡;
12.单台除氧器补水阀门的液位控制输入包括整体液位控制输出和液位协调控制输出。
13.进一步地,利用所述除氧器群平均液位偏差进行整体液位控制,采用串级控制,包括:
14.主调节控制,进行平均液位调节,利用除氧器液位设定值与除氧器平均液位预测值的偏差情况,通过主调节先进控制模型输出补水和上水偏差的补偿;
15.副调节控制,进行补水和上水偏差调整,利用主调补偿后的上水和补水偏差设定值与上水和补水偏差的偏差情况,通过副调节先进控制模型同时调整除氧器群的所有补水阀门,以保证上水和补水偏差的稳定。
16.进一步地,所述主调节控制,包括:
17.从补给水母管和去汽包上水管分别获取除氧器群的总补水流量和总上水流量;
18.计算所述总补水流量和所述总上水流量的差值,得到上水和补水偏差;
19.根据当前的上水和补水偏差,结合除氧器群尺寸信息,计算每个预设周期由上水和补水偏差导致的液位变化增量;
20.获取各个除氧器的液位,并计算得到除氧器平均液位;
21.利用所述除氧器平均液位和所述液位变化增量,通过设定预测时间计算n个预设周期后的除氧器平均液位预测值;
22.以所述除氧器平均液位预测值为测量值,利用除氧器液位设定值作为主调偏差设定值,采用主调pid控制算法,输出上水和补水偏差增量。
23.进一步地,所述副调节控制,包括:
24.计算所述上水和补水偏差增量与上水和补水偏差基本设定值之和,得到副调偏差设定值;
25.以所述上水和补水偏差作为测量值,利用所述副调偏差设定值,采用副调pid控制算法,输出除氧器群整体调节开度增量。
26.进一步地,利用各个除氧器的液位偏差率进行液位协调控制,包括:
27.获取各个除氧器的液位和液位设定值,并计算得到各个除氧器的液位偏差率;
28.利用各个除氧器的液位偏差率,得到各个除氧器的平均液位偏差率;
29.记录各个除氧器当前时刻前m个时刻的偏差变化率,预测k个预设周期后的单台除氧器偏差率预测值;
30.以所述单台除氧器偏差率预测值为测量值,利用所述各个除氧器的平均液位偏差率作为单台协调偏差设定值,采用单台协调pid控制算法,输出为各个除氧器的协调开度增量。
31.第二方面,本发明实施例提供一种除氧器群液位协调控制系统,所述系统包括:
32.一个整体液位控制子系统,用于获取除氧器群平均液位偏差;利用所述除氧器群平均液位偏差进行整体液位控制,实现除氧器群整体出力与外界需求达到平衡;
33.至少一个液位协调控制子系统,用于获取各个除氧器的液位偏差率;利用各个除氧器的液位偏差率进行液位协调控制,实现各个除氧器的液位保持均衡;
34.其中,单台除氧器补水阀门的液位控制输入包括整体液位控制输出和对应液位协调控制子系统的液位协调控制输出。
35.进一步地,所述整体液位控制子系统,包括:
36.主调节控制回路,用于进行平均液位调节,利用除氧器液位设定值与除氧器平均液位预测值的偏差情况,通过主调节先进控制模型输出补水和上水偏差的补偿;
37.副调节控制回路,用于进行补水和上水偏差调整,利用主调补偿后的上水和补水偏差设定值与上水和补水偏差的偏差情况,通过副调节先进控制模型同时调整除氧器群的所有补水阀门,以保证上水和补水偏差的稳定;
38.其中,所述主调节控制回路和所述副调节控制回路形成串级控制。
39.进一步地,所述主调节控制回路包括:
40.上水和补水偏差计算模块,用于从补给水母管和去汽包上水管分别获取除氧器群的总补水流量和总上水流量;计算所述总补水流量和所述总上水流量的差值,得到上水和补水偏差;
41.平均液位计算与预测模块,用于根据当前的上水和补水偏差,结合除氧器群尺寸信息,计算每个预设周期由上水和补水偏差导致的液位变化增量;获取各个除氧器的液位,并计算得到除氧器平均液位;利用所述除氧器平均液位和所述液位变化增量,通过设定预测时间计算n个预设周期后的除氧器平均液位预测值;
42.主调过程控制器,用于以所述除氧器平均液位预测值为测量值,利用除氧器液位设定值作为主调偏差设定值,采用主调pid控制算法,输出上水和补水偏差增量。
43.进一步地,所述副调节控制回路包括:
44.副调过程控制器,用于计算所述上水和补水偏差增量与上水和补水偏差基本设定值之和,得到副调偏差设定值;以及
45.以所述上水和补水偏差作为测量值,利用所述副调偏差设定值,采用副调pid控制算法,输出除氧器群整体调节开度增量。
46.进一步地,所述液位协调控制子系统包括:
47.平均液位偏差计算模块,用于获取各个除氧器的液位和液位设定值,并计算得到各个除氧器的液位偏差率;利用各个除氧器的液位偏差率,得到各个除氧器的平均液位偏差率;
48.液位偏差率预测模块,用于记录各个除氧器当前时刻前m个时刻的偏差变化率,预测k个预设周期后的单台除氧器偏差率预测值;
49.单台协调过程控制器,用于以所述单台除氧器偏差率预测值为测量值,利用所述各个除氧器的平均液位偏差率作为单台协调偏差设定值,采用单台协调pid控制算法,输出为各个除氧器的协调开度增量。
50.本发明实施例具有如下优点:
51.本发明实施例将除氧器群作为一个整体单一目标,以平均液位作为整体液位的表征,基于物料守恒原理进行串级控制。除氧器群作为整体后,各除氧器作为单体基于液位偏差率进行协调单一除氧器液位的控制。这样,自动控制的实现,一方面可以实时保障除氧器的除氧效果,保障锅炉生产的长周期运行;另一方面使除氧器群实现准无人化操作,提高了生产的智能化,降低了工人的劳动强度。
附图说明
52.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其它的实施附图。
53.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
54.图1为本发明实施例提供一种除氧器群的除氧器布置示意图;
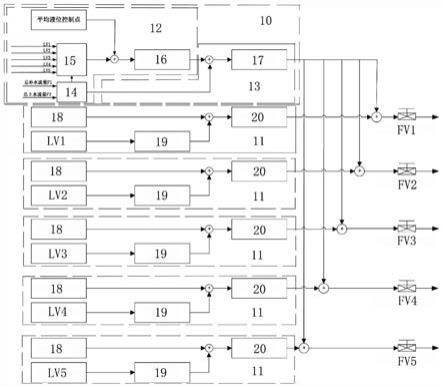
55.图2为本发明实施例一种除氧器群液位协调控制系统布置示意图;
56.图3为本发明实施例提供一种除氧器群液位协调控制方法的流程示意图;
57.图4为本发明实施例提供的利用除氧器群平均液位进行整体液位控制的流程示意图;
58.图5为本发明实施例提供的利用各个除氧器的液位偏差率进行液位协调控制的流程示意图。
具体实施方式
59.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.本发明实施例应用于热电企业除氧器群中除氧器间液位协调控制,尤其应用于除氧器补水能力不足情况下的除氧器液位的协调控制。
61.本发明实施例的目的为有效实现除氧器液位在全工况下的自动控制,确保除氧器群的各除氧器间的液位均衡,使各除氧器均处于安全范围内,保障生产安全。
62.参考图1,本发明实施例以5个除氧器形成的除氧器群为例,介绍本发明实施例中的除氧器群的各个除氧器布置情况,以及除氧器群中的除氧器的工作原理。如图1中所示,五个除氧器分别为第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05。上述五个除氧器共用一个补给水母管06和一个加热蒸汽母管07,补给水母管06用于为五个除氧器供水和补水,保证五个除氧器的上水液位,补给水母管06上的总补水流量记为f1,加热蒸汽母管07用于为五个供氧器提供蒸汽。每个除氧器均有一个补水阀门,第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的补水阀门分别记为fv1、fv2、fv3、fv4、fv5。五个除氧器补给水阀门分布于补给水母管06的不同位置,用于控制各个除氧器液位,第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的液位分别记为lv1、lv2、lv3、lv4、lv5。同样地,上述五个除氧器共用一个汽包上水母管08,五个除氧器出水口分布于汽包上水母管08的不同位置,汽包上水母管08最终由去汽包上水管09对外上水。去汽包上水管09上的总上水流量记为f2。
63.参考图2,本发明实施例提供了一种除氧器群液位协调控制系统,其包括:一个整
体液位控制子系统10和至少一个液位协调控制子系统11。其中,整体液位控制子系统10用于控制除氧器群中各个除氧器,每个液位协调控制子系统11对应一个除氧器。
64.进一步地,整体液位控制子系统10用于获取除氧器群平均液位偏差;利用所述除氧器群平均液位偏差进行整体液位控制,实现除氧器群整体出力与外界需求达到平衡;至少一个液位协调控制子系统11用于获取各个除氧器的液位偏差率;利用各个除氧器的液位偏差率进行液位协调控制,实现各个除氧器的液位保持均衡;这样,单台除氧器补水阀门的液位控制输入包括整体液位控制输出和对应液位协调控制子系统的液位协调控制输出。
65.具体地,整体液位控制子系统10包括主调节控制回路12和副调节控制回路13,主调节控制回路12和副调节控制回路13形成串级控制。主调节控制回路12进一步包括:上水和补水偏差计算模块14、平均液位计算与预测模块15、主调过程控制器16。主调节控制回路12用于进行平均液位调节,利用除氧器液位设定值与除氧器平均液位预测值的偏差情况,通过主调节先进控制模型输出补水和上水偏差的补偿。副调节控制回路13进一步包括:副调过程控制器17,副调节控制回路用于进行补水和上水偏差调整,利用主调补偿后的上水和补水偏差设定值与上水和补水偏差的偏差情况,通过副调节先进控制模型同时调整除氧器群的所有补水阀门,以保证上水和补水偏差的稳定。
66.具体地,每个液位协调控制子系统11包括平均液位偏差计算模块18、液位偏差率预测模块19、单台协调过程控制器20,液位协调控制子系统11通过各个除氧器的平均液位偏差率与单台除氧器液位偏差率的差值,调节单台除氧器补水阀门,使单台除氧器的液位偏差率与各个除氧器的平均液位偏差率相同,从而控制除氧器群的每台除氧器的液位差不多。避免因为抢水问题,造成的有的液位一直很高,有的液位一直很低的情况。
67.本发明实施例公开的上述一种除氧器群液位协调控制系统,将除氧器群作为一个整体单一目标,以平均液位作为整体液位的表征,基于物料守恒原理进行串级控制。除氧器群作为整体后,各除氧器作为单体基于液位偏差率进行协调单一除氧器液位的控制。这样,自动控制的实现,一方面可以实时保障除氧器的除氧效果,保障锅炉生产的长周期运行;另一方面使除氧器群实现准无人化操作,提高了生产的智能化,降低了工人的劳动强度。
68.与上述公开的一种除氧器群液位协调控制系统相对应,本发明实施例还公开了一种除氧器群液位协调控制方法。以下结合上述描述的一种除氧器群液位协调控制系统详细介绍本发明实施例中公开的一种除氧器群液位协调控制方法。
69.参考图3,本发明实施例提供的一种除氧器群液位协调控制方法包括:通过整体液位控制子系统10获取除氧器群平均液位偏差;利用上述除氧器群平均液位偏差进行整体液位控制,实现除氧器群整体出力与外界需求达到平衡;同时,除氧器群中每个除氧器均对应一个液位协调控制子系统11,针对各个除氧器,通过各自对应的液位协调控制子系统11获取该除氧器的液位偏差率;利用各个除氧器的液位偏差率进行液位协调控制,实现各个除氧器的液位保持均衡;单台除氧器补水阀门的液位控制输入包括整体液位控制输出和液位协调控制输出。
70.本发明实施例公开的上述一种除氧器群液位协调控制方法的总体思路为:将除氧器群看做一个整体;将除氧器群的平均液位作为表征这个整体的液位;根据各除氧器液位偏差率与除氧器群平均液位偏差的偏差情况,协调各除氧器间液位的平衡。即通过除氧器群整体液位的控制,实现除氧器群的整体出力与外界需求达到平衡;通过单台除氧器基于
液位偏差的调节,协调各除氧器的液位的均衡。
71.进一步地,通过整体液位控制子系统10利用除氧器群平均液位偏差进行整体液位控制,采用串级控制,包括:通过主调节控制回路12实现主调节控制,进行平均液位调节,利用除氧器液位设定值与除氧器平均液位预测值的偏差情况,通过主调节先进控制模型输出补水和上水偏差的补偿;通过副调节控制回路13实现副调节控制,进行补水和上水偏差调整,利用主调补偿后的上水和补水偏差设定值与上水和补水偏差的偏差情况,通过副调节先进控制模型同时调整除氧器群的所有补水阀门,以保证上水和补水偏差的稳定。
72.具体地,本发明实施例中,通过主调节控制回路12实现上述主调节控制,主调节控制为平均液位的调节,主调节控制回路12通过除氧器液位设定值lv_avg_sp(即平均液位设定值)与除氧器平均液位预测值lv_avg_yc的偏差情况,通过先进控制模型输出补水和上水偏差的补偿。
73.参考图2和图4,以下对上述主调节控制的实现步骤进行详细描述。
74.在主调节控制中,首先通过上水和补水偏差计算模块14从补给水母管06和去汽包上水管09分别获取除氧器群的总补水流量f1和总上水流量f2;计算总补水流量f1和总上水流量f2的差值,得到上水和补水偏差pc_ss_bs,并将上述上水和补水偏差pc_ss_bs发送至采用预测控制、超前控制的平均液位计算与预测模块15。如上所述,上水和补水偏差pc_ss_bs的计算公式如下:
75.pc_ss_bs=f1
‑
f2。
76.平均液位计算与预测模块15的输入为各除氧器的液位lvn(第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的液位lv1、lv2、lv3、lv4、lv5)以及上水和补水偏差pc_ss_bs。平均液位计算与预测模块15根据当前的上水和补水偏差pc_ss_bs(即当前的汽水偏差),结合除氧器群尺寸信息,计算每个预设周期由汽水偏差导致的液位变化增量lv_delt。除氧器群尺寸信息是指除氧器群中各个除氧器的长度、宽度、高度,结合图2,第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的长度分别记为long1、long2、long3、long4、long5;第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的宽度分别记为width1、width2、width3、width4、width5;第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的高度分别记为height1、height2、height3、height4、height5。这样,液位变化增量lv_delt的计算公式如下:
77.lv_delt=f(pc_ss_bs,long1,
……
long5,width1,
……
width5,height1,
……
height5)。
78.平均液位计算与预测模块15利用获取的各个除氧器的液位lvn,计算得到除氧器平均液位lv_avg;结合图2,第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的液位分别记为lv1、lv2、lv3、lv4、lv5。这样,除氧器平均液位lv_avg的计算公式如下:
79.lv_avg=(lv1+lv2+lv3+lv4+lv5)/5。
80.然后,平均液位计算与预测模块15利用所述除氧器平均液位lv_avg和所述液位变化增量lv_delt,通过设定预测时间计算n个预设周期后的除氧器平均液位预测值lv_avg_yc;具体地,在本发明实施例中,除氧器平均液位预测值lv_avg_yc的预测计算公式如下:
81.lv_avg_yc=lv_avg+n
·
lv_delt。
82.之后,平均液位计算与预测模块15将除氧器平均液位预测值lv_avg_yc发送至主调过程控制器16,主调过程控制器16可以为先进控制,也可以为传统的pid控制,这里以pid控制为例。主调过程控制器16在本发明实施例中也可称为平均液位调节器,以除氧器平均液位预测值l_avg_yc为测量值,利用除氧器液位设定值lv_avg_sp作为主调偏差设定值,采用主调pid控制算法,输出上水和补水偏差增量l_av。其中,主调pid控制算法中,p的取值范围为200~250,i的取值范围是200~300,d的取值范围是30~40。
83.具体地,本发明实施例中,通过副调节控制回路13实现上述副调节控制,副调节控制为补水和上水偏差调整,副调节控制回路13通过主调节控制补偿后的上水和补水偏差设定值pc_ss_bs_sp与上水和补水偏差pc_ss_bs的偏差情况,通过先进控制模块同时调整除氧器群的所有补水阀门,以保证上水和补水偏差的稳定。
84.参考图2和图4,以下对上述副调节控制的实现步骤进行详细描述。
85.在副调节控制中,副调过程控制器17从主调过程控制器16获取上水和补水偏差增量l_av,以及从上水和补水偏差计算模块14获取上水和补水偏差pc_ss_bs。副调过程控制器17计算上水和补水偏差增量l_av与上水和补水偏差基本设定值pc_ss_bs_jb之和,得到副调偏差设定值pc_ss_bs_sp(即上水和补水偏差设定值),副调偏差设定值pc_ss_bs_sp的计算公式具体如下:
86.pc_ss_bs_sp=l_av+pc_ss_bs_jb
87.其中,pc_ss_bs_jb为投入自动时的上水和补水偏差pc_ss_bs。
88.在本发明实施例中,同样地,副调过程控制器17可以为先进控制,也可以为传统的pid控制,这里以pid控制为例。副调过程控制器17在本发明实施例中也可称为上水补水偏差调节器,以上述上水和补水偏差pc_ss_bs作为测量值,利用上述副调偏差设定值pc_ss_bs_sp,采用副调pid控制算法,输出除氧器群整体调节开度增量pc_av_avg,直接作用到调节控制器群中的各个调节控制器。其中,副调pid控制算法中,p的取值范围为80~100,i的取值范围是50~60,d的取值范围是20~30。
89.参考图2和图5,以下对上述副调节控制的实现步骤进行详细描述。
90.在本发明实施例中,首先,每个液位协调控制子系统11通过平均液位偏差计算模块18,获取各个除氧器的液位lvn和液位设定值lv_spn,并计算得到各个除氧器的液位偏差率lvpcln;利用各个除氧器的液位偏差率lvpcln,得到各个除氧器的平均液位偏差率lvpcl_avg;如图2所示,第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的液位分别为lv1、lv2、lv3、lv4、lv5。进一步地,将第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的液位设定值分别记为lv_sp1、lv_sp2、lv_sp3、lv_sp4、lv_sp5;以及将第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的液位偏差率分别记为lvpcl1、lvpcl2、lvpcl3、lvpcl4、lvpcl5。这样,上述第一至第五除氧器的液位偏差率的计算公式分别如下:
91.lvpcl1=(lv_sp1
‑
lv1)/lv_sp1
92.lvpcl2=(lv_sp2
‑
lv2)/lv_sp2
93.lvpcl3=(lv_sp3
‑
lv3)/lv_sp3
94.lvpcl4=(lv_sp4
‑
lv4)/lv_sp4
95.lvpcl5=(lv_sp5
‑
lv5)/lv_sp5;
96.以及第一至第五除氧器的平均液位偏差lvpcl_avg的计算公式如下:
97.lvpcl_avg=(lvpcl1+lvpcl2+lvpcl3+lvpcl4+lvpcl5)/5。
98.然后,通过液位偏差率预测模块19利用超前补偿模块,针对每个除氧器,计算液位偏差率的预测值,根据近几个周期的平均变化速率计算液位偏差的变化趋势,即单台除氧器偏差率预测值lvpcln_yc。具体地,通过液位偏差率预测模块19记录各个除氧器当前时刻前m个时刻的偏差变化率,预测k个预设周期后的单台除氧器偏差率预测值lvpcln_yc;结合图2,以第一除氧器01为例,记录到的第一除氧器01当前时刻前m个时刻的偏差变化率为:lvpcl1(m),lvpcl1(m
‑
1),lvpcl1(m
‑
2),
……
lvpcl1,第一除氧器01的单台除氧器偏差率预测值lvpcl1_yc的预测计算公式如下:
99.lvpcl1_yc=lvpcl1
100.+k(lvpcl1(m)+lvpcl1(m
‑
1)+lvpcl1(m
‑
2)+
…
+lvpcl1)/m
101.单台协调过程控制器20从平均液位偏差计算模块18获取上述第一至第五除氧器的平均液位偏差率lvpcl_avg,以及从液位偏差率预测模块19获取各个除氧器对应的单台除氧器偏差率预测值lvpcln_yc。单台协调过程控制器20可采用多种控制器,如先进控制、常规pid控制,这里以常规pid为例,以单台除氧器偏差率预测值lvpcln_yc为测量值,利用上述第一至第五除氧器的平均液位偏差率lvpcl_avg作为单台协调偏差设定值,采用单台协调pid控制算法,输出为各个除氧器的协调开度增量fv_av_xtn。其中,单台协调pid控制算法中,p的取值范围为100~200,i的取值范围是30~80,d的取值范围是50~80。
102.本发明实施例中,通过各个除氧器的平均液位偏差率与单台除氧器偏差率预测值,调节单台除氧器补水阀门,使单台除氧器偏差率预测值与各个除氧器的平均液位偏差率相同,从而控制除氧器群的每台除氧器的液位差不多。避免了由于抢水问题造成的有的除氧器液位高低不均的情况。
103.本发明实施例中,单台除氧器补水阀门的液位控制输入包括整体液位控制输出和液位协调控制输出,结合图2,第一除氧器01、第二除氧器02、第三除氧器03、第四除氧器04、第五除氧器05的补水阀门fv1、fv2、fv3、fv4、fv5对应的液位控制输入s1、s2、s3、s4、s5分别为:
104.s1=pc_av_avg+fv_av_xt1
105.s2=pc_av_avg+fv_av_xt2
106.s3=pc_av_avg+fv_av_xt3
107.s4=pc_av_avg+fv_av_xt4
108.s5=pc_av_avg+fv_av_xt5。
109.本发明实施例将除氧器群作为一个整体单一目标,以平均液位作为整体液位的表征,基于物料守恒原理进行串级控制。除氧器群作为整体后,各除氧器作为单体基于液位偏差率进行协调单一除氧器液位的控制。这样,自动控制的实现,一方面可以实时保障除氧器的除氧效果,保障锅炉生产的长周期运行;另一方面使除氧器群实现准无人化操作,提高了生产的智能化,降低了工人的劳动强度。
110.所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的装置,设备和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
111.在本技术所提供的几个实施例中,应该理解到,所揭露的系统和方法,可以通过其它的方式实现。例如,以上所描述的系统实施例仅仅是示意性的,例如,模块的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个模块或组件可以结合或者可以集成到另一个装置,或一些特征可以忽略,或不执行。
112.另外,在本技术各个实施例中的各功能模块可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
113.集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,功能调用设备,或者网络设备等)执行本技术各个实施例方法的全部或部分步骤。虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。