1.本发明属于电力控制技术领域,具体涉及一种锅炉汽包水位控制系统及方法。
背景技术:
2.工业燃气锅炉是广泛用于炼油、发电、化工、冶金、核工业等现代工业的重要领域中的重要动力设备。是一个多参数、强耦合、大滞后系统,对燃气锅炉的控制体现了工业控制水平。锅炉汽包水位是工业燃气锅炉系统重要控制量之一,水位过高不仅会影响汽水分离,使蒸汽中的含水量增加降低蒸汽品质,长时间处于这样的状态还会使过热器管壁结垢,从而损坏设备;水位过低容易造成锅炉“干烧”,如果负载急剧增大,沸水气化的速度加快,若不及时有效控制,很容易烧坏锅炉甚至产生爆炸。
3.在锅炉的控制中,锅炉汽包水位是其重要控制参数,在实际工作中有诸多扰动因素,且极易出现“虚假水位”,而水位的高低波动不仅降低蒸汽质量影响生产,严重时可能使设备受到损坏,危及设备和工作人员安全。
4.目前,国内外针对汽包水位采用的控制方法为传统pid控制方法,但是,传统pid控制完成参数整定之后,很难进行在线调整,而在实际工作过程中,工业锅炉汽包水位会频繁受到给水和蒸汽扰动的影响。
技术实现要素:
5.本发明的目的在于,提供一种锅炉汽包水位控制方法,能够精确且快速的控制锅炉汽包水位。
6.本发明提供的基础方案为:
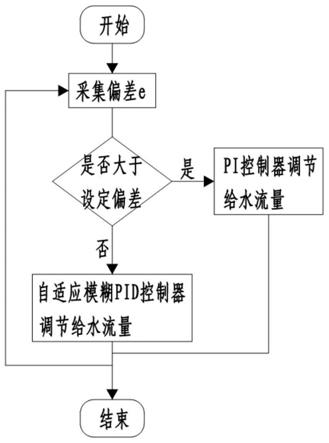
7.一种锅炉汽包水位控制方法,包括:
8.步骤一、建立pi控制器及自适应模糊pid控制器;其中,pi控制器为比例主导控制器;自适应模糊pid控制器为常规pid控制的基础上,根据误差e和误差变化率ec,利用模糊推理实时整定p、i、d参数的控制器;
9.步骤二,采集上一时刻水位的误差e,并判断误差e是否大于设定偏差;若大于则转到步骤三,若不大于则转到步骤四;
10.步骤三,采用pi控制器控制锅炉给水流量阀门的开度,并返回步骤一,对下一时刻水位进行控制;
11.步骤四,采用自适应模糊pid控制器控制锅炉给水流量阀门的开度,并返回步骤一,对下一时刻的水位进行控制。
12.基础方案工作过程及有益效果:
13.使用本方法,在建立pi控制器及自适应模糊pid控制器,正式进行锅炉的水位控制时,在采集上一时刻水位的误差e后,会根据误差e是否大于设定偏差,选择当前的对应控制方法。
14.具体的,如果误差e大于设定偏差,由于误差e较大,需要高效率的进行调节处理,
因此,采用比例主导作用的pi控制器控制锅炉给水流量阀门的开度,以便快速完整调节处理。如果误差e不大于设定偏差,则说明调整的重点在于调节的精准度,因此,采用自适应模糊pid控制器控制锅炉给水流量阀门的开度。由于自适应模糊pid控制器为常规pid控制的基础上,根据系统当前误差e和误差变化率ec,利用模糊推理实时整定p、i、d参数的控制器,可以精准的实时调节控制器的参数,保证当前调节的精准性。之后,再重复上述步骤,对下一时刻的水位进行控制。
15.综上,使用本方法,可以精确且快速的控制锅炉汽包水位。
16.进一步,步骤一中,建立的自适应模糊pid控制器中,输入量包括误差e、误差变化率ec,输出量包括
△
k
p
、
△
k
i
和
△
k
d
;根据输入量结合预设的模糊整定规则,得到输出量。
17.有益效果:这样的设置,通过预设的模糊征订规则,可以实时整定输出量,即
△
k
p
、
△
k
i
和
△
k
d
,从而精准的实时调节控制器的参数。
18.进一步,步骤一中,还在自适应模糊pid控制器的基础上引入变论域因子α,实际误差基本论域为[
‑
α(e)e,α(e)e],误差变化率基本论域为[
‑
α(ec)ec,α(ec)ec],输出论域为[
‑
α
△
kp,α
△
kp,]、[
‑
α
△
ki,α
△
ki]、[
‑
α
△
kd,
‑
α
△
kd];
[0019]
输入论域伸缩因子为α(x)=1
‑
λe
‑
kx
·
x
,其中,λ∈(0,1),k>0;输出论域伸缩因子为α(x)=(|x|/e)τ+ε,其中,τ>0,λ、k、τ、ε为常数。
[0020]
有益效果:这样的设置,可以使控制论域随着偏大的变化而变化,保证实时调节的结果的准确性。λ、k、τ、ε的具体数值,本领域技术人员可根据使用的需求具体设置。
[0021]
进一步,自适应模糊pid控制器的输入量误差e、误差变化率ec、输出量
△
k
p
、
△
k
i
、
△
k
d
的语言变量值均取负大、负中、负小、零、正小、正中及正大,论域均设定为[
‑
6,6],量化等级均取{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6},且所有语言变量的各模糊子集的隶属函数均取三角形隶属函数。
[0022]
有益效果:这样的参数定义方式,在保证精确性的同时,可以保证调整的整体效率。
[0023]
进一步,自适应模糊pid控制器中参数的模糊整定规则为:
[0024]
根据数值范围,分别为
△
k
p
、
△
k
i
及
△
k
d
设置大值区、中值区和小值区;
[0025]
当∣e∣大于第一阈值时,取大值区的
△
k
p
和
△
k
i
,如果e
×
ec<0,取中值区的
△
k
d
;如果e
×
ec>0,则取大值区的
△
k
d
;
[0026]
当∣e∣大于第二阈值小于第一阈值时,取小值区的
△
k
p
和中值区的
△
k
i
;如果e
×
ec<0,取大值区的
△
k
d
;如果e
×
ec>0,则取中值区的
△
k
d
;
[0027]
当∣e∣小于等于第二阈值时,取中值区的
△
k
p
和小值区的
△
k
i
;如果e
×
ec<0,取小值区的
△
k
d
;如果e
×
ec>0,取中值区的
△
k
d
。
[0028]
有益效果:根据这样的模糊整定规则,可以根据误差e及误差变化率ec的具体情况,针对性的进行输出量的选择,保证调节的有效性。
[0029]
进一步,步骤四中,采用自适应模糊pid模型控制锅炉给水流量阀门的开度时,首先利用基于优化函数的pid整定方法得到初始的参数k
p0
、k
i0
、k
d0
,再通过自适应模糊pid模型模糊推理得到各参数的变化量
△
k
p
、
△
k
i
、
△
k
d
,将参数变化量与初始参数相叠加得到实时整定的k
p
、k
i
、k
d
参数后,得到控制器输出量,再根据控制器输出量控制阀门开度。
[0030]
有益效果:这样的设置,可以保证长时间工作下,本方法效果的一致性和稳定性。
[0031]
进一步,步骤四中,还包括不完全微分环节,不完全微分的传递函数形式为:
[0032]
g(s)=u(s)/e(s)=[(t
α
s+1)/(t
f
s+1)]*(k
p
+k
p
/t
i
s+k
p
t
d
s);其中,kp为比例系数,ti为积分时间常数,td为微分时间常数,tα为串联一阶微分环节常数,tf为串联惯性环节常数。
[0033]
有益效果:不完全微分的实质是在pid控制器的基础上增加一个低通滤波器,即一阶微分环节;但是,现有的不完全微分在系统运行过程中,不能完全微分与模糊pid相结合,自适应算法整定参数只有k
p
、k
i
,降低了系统对误差变化率的控制。与现有技术相比,本技术改进后的不完全微分,既能对p、i、d参数均实现在线整定,同时能合理抑制误差变化率,并兼有不完全微分功能抑制振荡。
[0034]
本技术的另一目的在于,提供一种锅炉汽包水位控制系统,应用于上述锅炉汽包水位控制方法,包括采集模块、分析模块和处理模块;
[0035]
处理模块包括pi控制器及自适应模糊pid控制器;pi控制器为比例主导控制器;自适应模糊pid控制器为常规pid控制的基础上,根据误差e和误差变化率ec,利用模糊推理实时整定p、i、d参数的控制器;采集模块用于采集汽包水位、蒸汽流量及给水流量;分析模块用于根据汽包水位、蒸汽流量及给水流量分析水位的误差e,还用于根据误差e分析误差变化率ec,还用于判断误差e是否大于设定偏差;
[0036]
处理单元用于误差e大于设定偏差时,采用pi控制器控制锅炉给水流量阀门的开度;处理单元还用于误差e不大于设定偏差时,采用自适应模糊pid控制器控制锅炉给水流量阀门的开度。
[0037]
有益效果:使用本方法,在建立pi控制器及自适应模糊pid控制器,正式进行锅炉的水位控制时,在采集上一时刻水位的误差e后,会根据误差e是否大于设定偏差,选择当前的对应控制方法。从而精确且快速的控制锅炉汽包水位。
[0038]
进一步,自适应模糊pid控制器的输入量包括误差e、误差变化率ec,输出量包括
△
k
p
、
△
k
i
和
△
k
d
;根据输入量结合预设的模糊整定规则,得到输出量;其中,预设的模糊整定规则为:
[0039]
当∣e∣大于第一阈值时,取大值区的
△
k
p
和
△
k
i
,如果e
×
ec<0,取中值区的
△
k
d
;如果e
×
ec>0,则取大值区的
△
k
d
;
[0040]
当∣e∣大于第二阈值小于第一阈值时,取小值区的
△
k
p
和中值区的
△
k
i
;如果e
×
ec<0,取大值区的
△
k
d
;如果e
×
ec>0,则取中值区的
△
k
d
;
[0041]
当∣e∣小于等于第二阈值时,取中值区的
△
k
p
和小值区的
△
k
i
;如果e
×
ec<0,取小值区的
△
k
d
;如果e
×
ec>0,取中值区的
△
k
d
。
[0042]
有益效果:根据这样的模糊整定规则,可以根据误差e及误差变化率ec的具体情况,针对性的进行输出量的选择,保证调节的有效性。
[0043]
进一步,自适应模糊pid控制器还引入了变论域因子α,实际误差基本论域为[
‑
α(e)e,α(e)e],误差变化率基本论域为[
‑
α(ec)ec,α(ec)ec],输出论域为[
‑
α
△
kp,α
△
kp,]、[
‑
α
△
ki,α
△
ki]、[
‑
α
△
kd,
‑
α
△
kd];
[0044]
输入论域伸缩因子为α(x)=1
‑
λe
‑
kx
·
x
,其中,λ∈(0,1),k>0;输出论域伸缩因子为α(x)=(|x|/e)τ+ε,其中,τ>0,λ、k、τ、ε为常数。
[0045]
有益效果:这样的设置,可以使控制论域随着偏大的变化而变化,保证实时调节的
结果的准确性。λ、k、τ、ε的具体数值,本领域技术人员可根据使用的需求具体设置。
[0046]
通过仿真分析,传统的pid控制器最大超调量约50%,调节时间大约4.2秒。本项目所设计的控制器,最大超调均不超过13%,其中带不完全微分环节的自适应控制器阶跃响应无超调;调节时间均小于2秒,其中带不完全微分环节的自适应控制器调节时间为0.7秒。综上所述,本技术的动静态性能均大幅度优于传统pid控制,能够精确且快速的控制锅炉汽包水位。
附图说明
[0047]
图1为本发明实施例一中锅炉汽包水位控制方法的流程图;
[0048]
图2为本发明实施例一中锅炉汽包水位控制系统的逻辑框图;
[0049]
图3为本发明实施例一的仿真对比图;
[0050]
图4为本发明实施例中不完全微分环节的示意图。
具体实施方式
[0051]
下面通过具体实施方式进一步详细的说明:
[0052]
实施例一
[0053]
如图1所示,一种锅炉汽包水位控制方法,包括:
[0054]
步骤一、建立pi控制器及自适应模糊pid控制器;其中,pi控制器为比例主导控制器;
[0055]
对pi控制器的参数权重优化,即确定一组合适的kp、ki参数,使得系统控制指标到达最优,通常采用以控制系统瞬时误差e(t)为泛函的积分作为评价指标,常用的评价指标有isae、itae、iae、ise、iste、ist2e。发明人针对以上6种性能指标函数进行仿真研究后,采用ist2e指标作为控制器参数整定准则,并结合非线性控制系统优化设计算法,对pi控制器的参数权重进行优化,得到最佳的控制参数,提高系统快速性。
[0056]
自适应模糊pid控制器为常规pid控制的基础上,根据系统当前误差e和误差变化率ec,利用模糊推理实时整定p、i、d参数的控制器。自适应模糊pid控制器中,输入量包括误差e、误差变化率ec,输出量包括
△
k
p
、
△
k
i
和
△
k
d
;根据输入量结合预设的模糊整定规则,得到输出量。
[0057]
并在自适应模糊pid控制器的基础上引入变论域因子α,实际误差基本论域为[
‑
α(e)e,α(e)e],误差变化率基本论域为[
‑
α(ec)ec,α(ec)ec],输出论域为[
‑
α
△
kp,α
△
kp,]、[
‑
α
△
ki,α
△
ki]、[
‑
α
△
kd,
‑
α
△
kd];输入论域伸缩因子为α(x)=1
‑
λe
‑
kx
·
x
,其中,λ∈(0,1),k>0;输出论域伸缩因子为α(x)=(|x|/e)τ+ε,其中,τ>0,λ、k、τ、ε为常数。λ、k、τ、ε的具体数值,本领域技术人员可根据使用的需求具体设置。
[0058]
其中,自适应模糊pid控制器的输入量误差e、误差变化率ec、输出量
△
k
p
、
△
k
i
、
△
k
d
的语言变量值均取负大、负中、负小、零、正小、正中及正大,论域均设定为[
‑
6,6],量化等级均取{
‑
6,
‑
5,
‑
4,
‑
3,
‑
2,
‑
1,0,1,2,3,4,5,6},且所有语言变量的各模糊子集的隶属函数均取三角形隶属函数。
[0059]
自适应模糊pid控制器中参数的模糊整定规则为:
[0060]
根据数值范围,分别为
△
k
p
、
△
k
i
及
△
k
d
设置大值区、中值区和小值区;
[0061]
当∣e∣大于第一阈值时,取大值区的
△
k
p
和
△
k
i
,如果e
×
ec<0,则取中值区的
△
k
d
;如果e
×
ec>0,则取大值区的
△
k
d
;
[0062]
当∣e∣大于第二阈值小于第一阈值时,为使系统响应具有较小的超调,小值区的
△
k
p
,中值区的
△
k
i
;如果e
×
ec<0,则取大值区的
△
k
d
;如果e
×
ec>0,kd的取值对系统响应的影响较大,取中值区的
△
k
d
;
[0063]
当∣e∣小于等于第二阈值时,为缩短系统的调节时间,应中值区的
△
k
p
和小值区的
△
k
i
;如果e
×
ec<0,则取小值区的
△
k
d
;如果e
×
ec>0,取中值区的
△
k
d
。
[0064]
步骤二,采集上一时刻水位的误差e,并判断误差e是否大于设定偏差;若大于则转到步骤三,若不大于则转到步骤四;本实施例中,设定偏差为30%,这样的数值,在保证准确性的同时,还可以保调节的整体效率。
[0065]
步骤三,采用pi控制器控制锅炉给水流量阀门的开度,并返回步骤一,对下一时刻水位进行控制;以提高系统的快速性。
[0066]
步骤四,采用自适应模糊pid控制器控制锅炉给水流量阀门的开度,再返回步骤一,对下一时刻的水位进行控制;确保系统的准确性。
[0067]
其中,自适应模糊pid控制器的工作过程包括:首先利用基于优化函数的pid整定方法得到初始的参数k
p0
、k
i0
、k
d0
,再通过自适应模糊pid模型模糊推理得到各参数的变化量
△
k
p
、
△
k
i
、
△
k
d
,将参数变化量与初始参数相叠加得到实时整定的k
p
、k
i
、k
d
参数后,得到控制器输出量,再根据控制器输出量控制阀门开度。本实施例中,优化函数的pid整定方法为ist2e准则。
[0068]
如图2所示,本发明还提供一种锅炉汽包水位控制系统,应用于上述锅炉汽包水位控制方法,包括采集模块、分析模块和处理模块。采集模块采用现有的用于锅炉汽包水位的采集装置即可。分析模块及处理模块集成在控制端,本实施例中控制端为工业pc。
[0069]
处理模块包括pi控制器及自适应模糊pid控制器;pi控制器为比例主导控制器;自适应模糊pid控制器为常规pid控制的基础上,根据误差e和误差变化率ec,利用模糊推理实时整定p、i、d参数的控制器;采集模块用于采集汽包水位、蒸汽流量及给水流量;分析模块用于根据汽包水位、蒸汽流量及给水流量分析水位的误差e,还用于根据误差e分析误差变化率ec,还用于判断误差e是否大于设定偏差;
[0070]
处理单元用于误差e大于设定偏差时,采用pi控制器控制锅炉给水流量阀门的开度;处理单元还用于误差e不大于设定偏差时,采用自适应模糊pid控制器控制锅炉给水流量阀门的开度。
[0071]
其中,自适应模糊pid控制器的输入量包括误差e、误差变化率ec,输出量包括
△
k
p
、
△
k
i
和
△
k
d
;根据输入量结合预设的模糊整定规则,得到输出量;其中,预设的模糊整定规则为:
[0072]
当∣e∣大于第一阈值时,取大值区的
△
k
p
和
△
k
i
,如果e
×
ec<0,取中值区的
△
k
d
;如果e
×
ec>0,则取大值区的
△
k
d
;当∣e∣大于第二阈值小于第一阈值时,取小值区的
△
k
p
和中值区的
△
k
i
;如果e
×
ec<0,取大值区的
△
k
d
;如果e
×
ec>0,则取中值区的
△
k
d
;当∣e∣小于等于第二阈值时,取中值区的
△
k
p
和小值区的
△
k
i
;如果e
×
ec<0,取小值区的
△
k
d
;如果e
×
ec>0,取中值区的
△
k
d
。
[0073]
自适应模糊pid控制器还引入了变论域因子α,实际误差基本论域为[
‑
α(e)e,α(e)
e],误差变化率基本论域为[
‑
α(ec)ec,α(ec)ec],输出论域为[
‑
α
△
kp,α
△
kp,]、[
‑
α
△
ki,α
△
ki]、[
‑
α
△
kd,
‑
α
△
kd];输入论域伸缩因子为α(x)=1
‑
λe
‑
kx
·
x
,其中,λ∈(0,1),k>0;输出论域伸缩因子为α(x)=(|x|/e)τ+ε,其中,τ>0,λ、k、τ、ε为常数。
[0074]
使用本方案,在建立pi控制器及自适应模糊pid控制器,正式进行锅炉的水位控制时,在采集上一时刻水位的误差e后,会根据误差e是否大于设定偏差,选择当前的对应控制方法。具体的,如果误差e大于设定偏差,由于误差e较大,需要高效率的进行调节处理,因此,采用比例主导作用的pi控制器控制锅炉给水流量阀门的开度,以便快速完整调节处理。如果误差e不大于设定偏差,则说明调整的重点在于调节的精准度,因此,采用自适应模糊pid控制器控制锅炉给水流量阀门的开度。由于自适应模糊pid控制器为常规pid控制的基础上,根据系统当前误差e和误差变化率ec,利用模糊推理实时整定p、i、d参数的控制器,可以精准的实时调节控制器的参数,保证当前调节的精准性。之后,再重复上述步骤,对下一时刻的水位进行控制。
[0075]
如图3所示,通过仿真分析,传统的pid控制器最大超调量约50%,调节时间大约4.2秒。本技术的技术方案,最大超调均不超过13%,其中自适应控制器阶跃响应无超调;调节时间均小于2秒,其中自适应控制器调节时间为0.7秒。综上所述,本技术的动静态性能均大幅度优于传统pid控制,能够精确且快速的控制锅炉汽包水位。
[0076]
实施例二
[0077]
与实施例一不同的是,如图4所示,本实施例一种锅炉汽包水位控制方法的步骤四中,还包括不完全微分环节,与自适应模糊pid相结合对系统进行控制,使系统可以对参数进行在线自整定的同时,利用不完全微分环节抑制系统振荡,以提高系统动静态性能。不完全微分的传递函数形式为:
[0078]
g(s)=u(s)/e(s)=[(t
α
s+1)/(t
f
s+1)]*(k
p
+k
p
/t
i
s+k
p
t
d
s);其中,k
p
为比例系数,t
i
为积分时间常数,t
d
为微分时间常数,t
α
为串联一阶微分环节常数,t
f
为串联惯性环节常数。
[0079]
不完全微分的实质是在pid控制器的基础上增加一个低通滤波器,即一阶微分环节;但是,现有的不完全微分在系统运行过程中,不能完全微分与模糊pid相结合,自适应算法整定参数只有k
p
、k
i
,降低了系统对误差变化率的控制。与现有技术相比,本技术改进后的不完全微分,既能对p、i、d参数均实现在线整定,同时能合理抑制误差变化率,并兼有不完全微分功能抑制振荡。这样既能实现控制参数在线自整定,又可以解决由于信号突变给系统造成的品质降低问题,从而提高控制品质。
[0080]
实施例三
[0081]
与实施例一不同的是,本实施例中,锅炉与汽包的连接管道上设有热量回收装置,热量量回收装置用于吸收连接管道的热能转化为电能存储在临时电源中;汽包的侧壁固设有滴液管,滴液管穿过汽包壁且与汽包壁密封连接;滴液管的出液端在汽包内,另一端连接有输送泵,输送泵与清洗桶连接,清洗桶内装有清洗液;输送泵分别与控制端及临时电源电连接;汽包的下降管外壁上固定有小型震动马达,小型震动马达分别与控制端及临时电源电连接;
[0082]
若水位连续n次大于设定偏差且水位偏高,则控制端控制输送泵工作第一工作时长,并控制小型震动马达工作第二预设时长。
[0083]
具体工作过程如下:
[0084]
锅炉向汽包输水的过程中,水的温度较高,而连接管基本为金属管道,比热容低,热量浪费较多。本方案中,通过在连接管道上设有热量回收装置,热量量回收装置吸收连接管道的热能转化为电能存储在临时电源中,可以有效的利用传输过程中的热量。
[0085]
如果在工作过程中,水位连续n次大于设定偏差且水位偏高,则说明汽包的下降管出现了不够通畅的情况,换个说法,出现了较为轻微的堵塞。如果不及时处理,会影响到锅炉汽包的工作效率,进而影响整体装置的效率。因此,则控制端控制输送泵工作第一工作时长,并控制小型震动马达工作第二预设时长。通过控制输送泵工作向汽包内送入清洗液,可以对下降管进行清洗,同时,小型震动马达进行震动,一方面可以将清洗液与下管道的水混合得跟家均匀,另一方面则可以将下水道内的堵塞物通过震动的方式弄散,保证清洗的效果。通过这样的方式,可以在下降管出现轻微堵塞时,及时对其进行处理。并且,处理的电能来源于连接管道上回收的热量,不用专门设置能量结构,可以节约能源。由于下降管出现轻微堵的情况并非频繁发生,存储电能的效率也足以满足日常的需求。
[0086]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。